用于气溶胶探测光学雷达的LED光源的研制
2018-04-16 05:53钟文婷华灯鑫晏克俊
西安理工大学学报 2018年1期
钟文婷, 华灯鑫, 刘 君, 张 宸, 晏克俊
(西安理工大学 机械与精密仪器工程学院, 陕西 西安 710048)
气溶胶作为地球大气的重要组成部分,是大气环境中成分复杂、对气候影响较大的颗粒物之一,来源不同的气溶胶,其组成成分、形状尺度不同,环境效应也不同,对大气气溶胶的光学和微物理特性的研究日益成为近期科学研究的热点和前沿[1]。气溶胶探测光学雷达是对大气气溶胶进行高精度遥感探测的有效手段[2],目前一般采用激光器作为光源,气溶胶粒子的回波散射信号特征依赖于发射激光波长,利用多波长激光雷达可以获得不同波长的气溶胶消光系数,从而得到表征粒子特征的Ångström指数等信息,为进一步分析气溶胶微物理特征提供数据[3,4]。但是,激光雷达的波长资源有限,只局限在特定波长上对气溶胶的探测。而且激光雷达盲区较大、能量又高,在人类活动频繁且高楼林立的城市中,激光雷达水平探测近程气溶胶显得较为困难且不安全。
LED光谱资源丰富,以其作为遥感光源搭建光学雷达系统进行气溶胶探测,可以实现在更多波长上对气溶胶的观测,弥补激光雷达在波长可选择性方面的不足。但是,LED是连续光源,能量弱且发散角大,不能直接用于气溶胶探测。本文研制了一款应用于气溶胶探测光学雷达的LED光源,并通过仿真和初步实验说明该光源可以用于气溶胶探测。
1 LED光源的总体方案
气溶胶探测光学雷达工作时,由遥感光源向大气发射一束脉冲光,大气中的气溶胶粒子与脉冲光相互作用产生的后向散射光,通过光学接收单元接收,由信号采集单元采集大气回波信号,再送入计算机进行分析处理,最后通过反演计算得到大气气溶胶的光学特性。根据气溶胶探测光学雷达的需要,LED光源应满足以下要求:
1) 纳秒级的光脉冲宽度:光脉冲宽度决定了雷达探测的最小距离分辨率,光脉冲宽度越小,距离分辨率越高;
2) 单个光脉冲的能量:单个光脉冲的能量与雷达的最远探测距离有关,能量越大,可以探测到的距离越远;
3) 脉冲的重复频率:重复频率与降低噪声有关,重复频率越高,信噪比越大;
4) 出射光束发散角:发散角应小于雷达的接收视场,以保证光束在传输过程中全部或绝大部分保持在望远镜接收视场内,提高光能利用率。
LED光源系统构成如图1所示,主要由LED脉冲驱动电源、大功率LED、全内反射式(Total Internal Reflection,TIR)准直器、准直扩束光路构成。
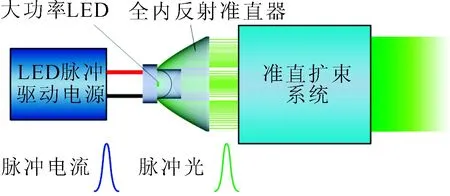
图1 LED光源系统构成Fig.1 Structure of LED light source system
LED光源工作时,LED脉冲驱动电源产生脉宽为纳秒级的脉冲电流,驱动大功率LED发出脉冲光束,该光束经全内反射式准直器初步准直后,再经过准直扩束光路再次准直,以毫弧度级的发散角发射出去。
2 LED脉冲驱动电源的设计
根据LED的工作原理,只允许电流单方向通过,电流通过时LED会发光,因此可通过控制电流通断产生脉冲光,设计采用功率场效应管开关电路实现。考虑到雷达探测的距离分辨率,要求光脉冲的脉宽很小,采用高速功率场效应管IRF610作为开关器件,其上升时间为17 ns,下降时间为9 ns。图2为LED脉冲驱动电路的原理图。
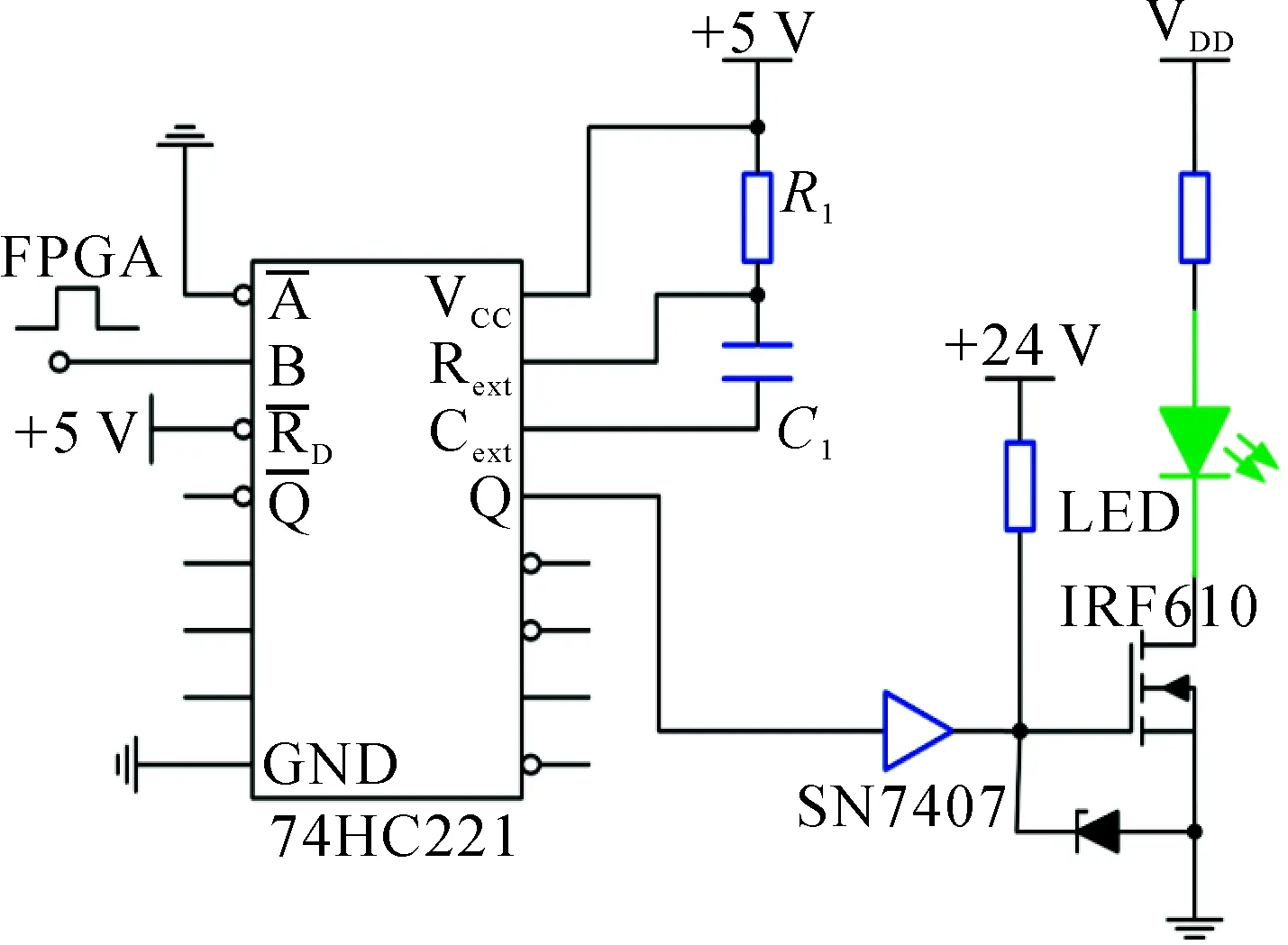
图2 LED脉冲驱动电路Fig.2 LED pulse driving circuit

tw=R1·C1·ln2
(1)
可通过调节电阻值和电容值得到目标脉宽。
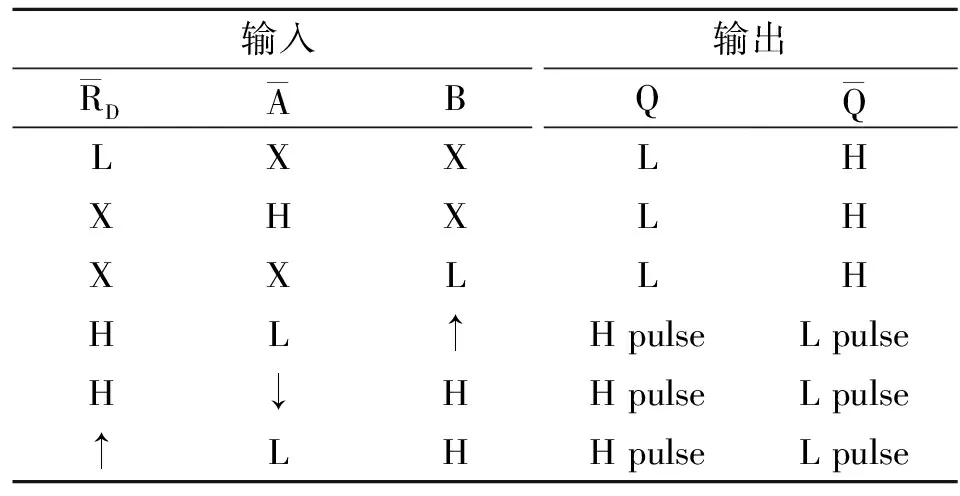
表1 74HC221的真值表Tab.1 Truth table of 74HC221
(注释:H代表高电平,L代表低电平,X代表该输入值无关系,↑代表上升沿,↓代表下降沿,H pulse代表一个高电平脉冲,L pulse代表一个低电平脉冲)
选用现场可编程门阵列FPGA设计了触发脉冲发生器,输出重复频率为100 kHz的脉冲,给74HC221的管脚B提供上升沿。雷达探测时,单次大气回波信号是由颗粒物与一个光脉冲相互作用产生的,信号的噪声以白噪声为主,为了降低噪声,将大量回波信号进行累加平均处理,重复频率越高,单位时间内累加的脉冲次数越多,对噪声的抑制作用越大,但重复频率越高,意味着脉冲周期越小,会影响探测距离,本文将重复频率设置为100 kHz。
脉冲时序如图3所示。FPGA输出信号的上升沿产生时,74HC221的管脚Q输出一个脉宽为tw的脉冲给正向驱动器7407,由7407驱动IRF610。给漏极回路电源端VDD提供高压,当IRF610导通时,电流通过LED使其发光,通过控制导通时间来控制光脉冲的宽度。
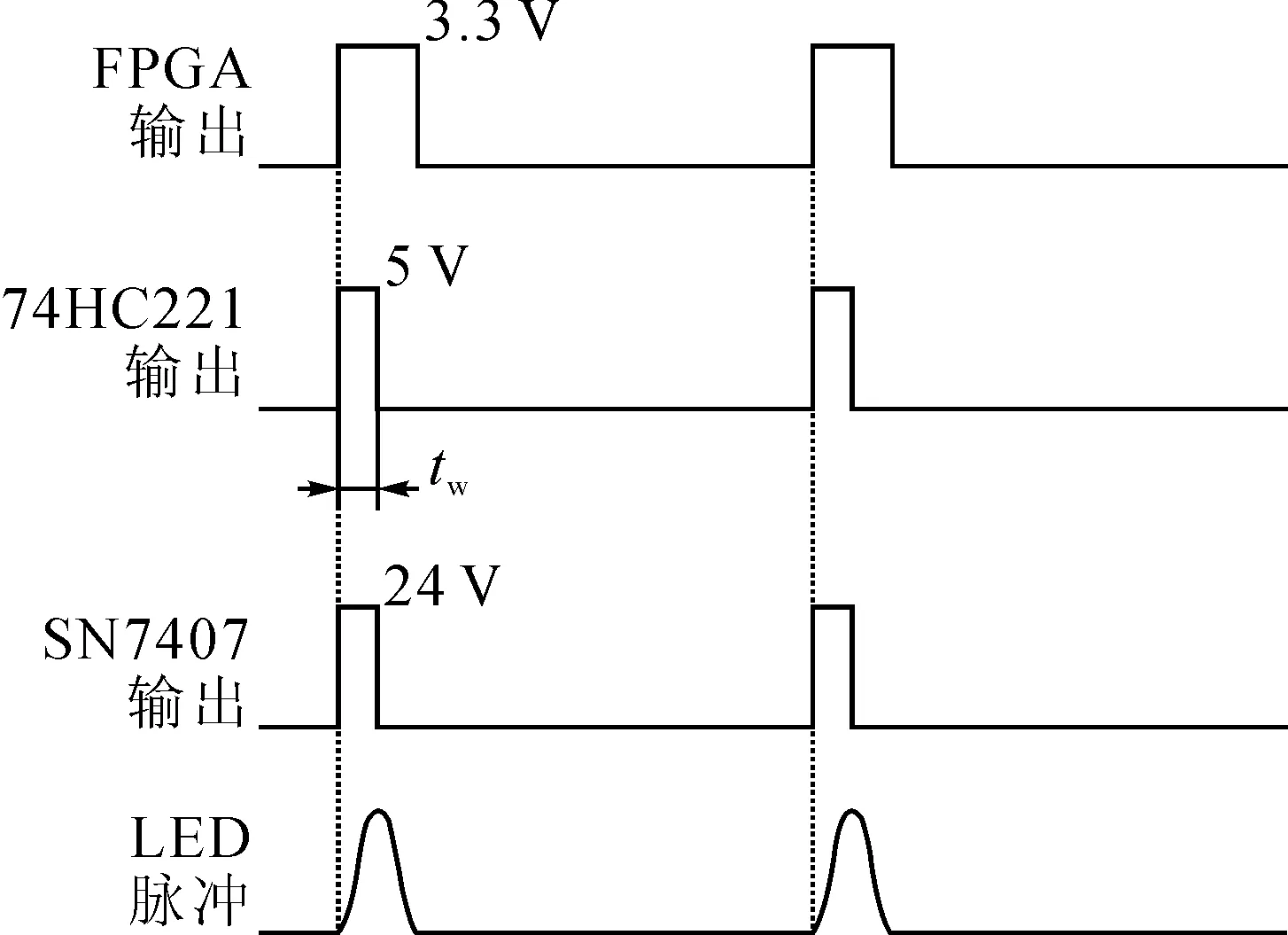
图3 脉冲时序示意图Fig.3 Schematic diagram of pulse timing
用光电二极管探测LED光束,如图4所示。LED发出的脉冲光束的脉宽为193.246 ns,对应雷达探测的距离分辨率为30 m,使用激光功率能量计测得其单个脉冲能量为30 nJ。
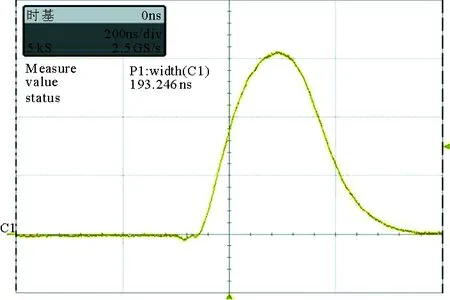
图4 LED脉冲光探测Fig.4 Detection of LED light pulse
3 LED光源准直光路的设计
LED光源是一个朗伯光源[5],发散角接近180°,必须经过准直才能应用于光学雷达。本文先利用全内反射式(TIR)准直器对LED光束进行一级准直,再采用逆向开普勒望远镜结构进行二级准直扩束,达到高精度准直的目的。
3.1 一级准直原理与模型建立
全内反射式准直器是一种旋转对称的自由曲面透镜,集折射、反射于一体,结构紧凑,适用于LED准直[6-8],其外形如图5(a)所示。它的工作原理如图5(b)所示,将LED放置于准直器的中心O,表面1和表面3均为旋转对称结构的非球面,与光轴夹角小于临界角θc的光线,经表面1折射后平行于光轴出射,与光轴夹角大于θc的光线,先经表面2折射,再经过表面3全反射后平行于光轴出射。
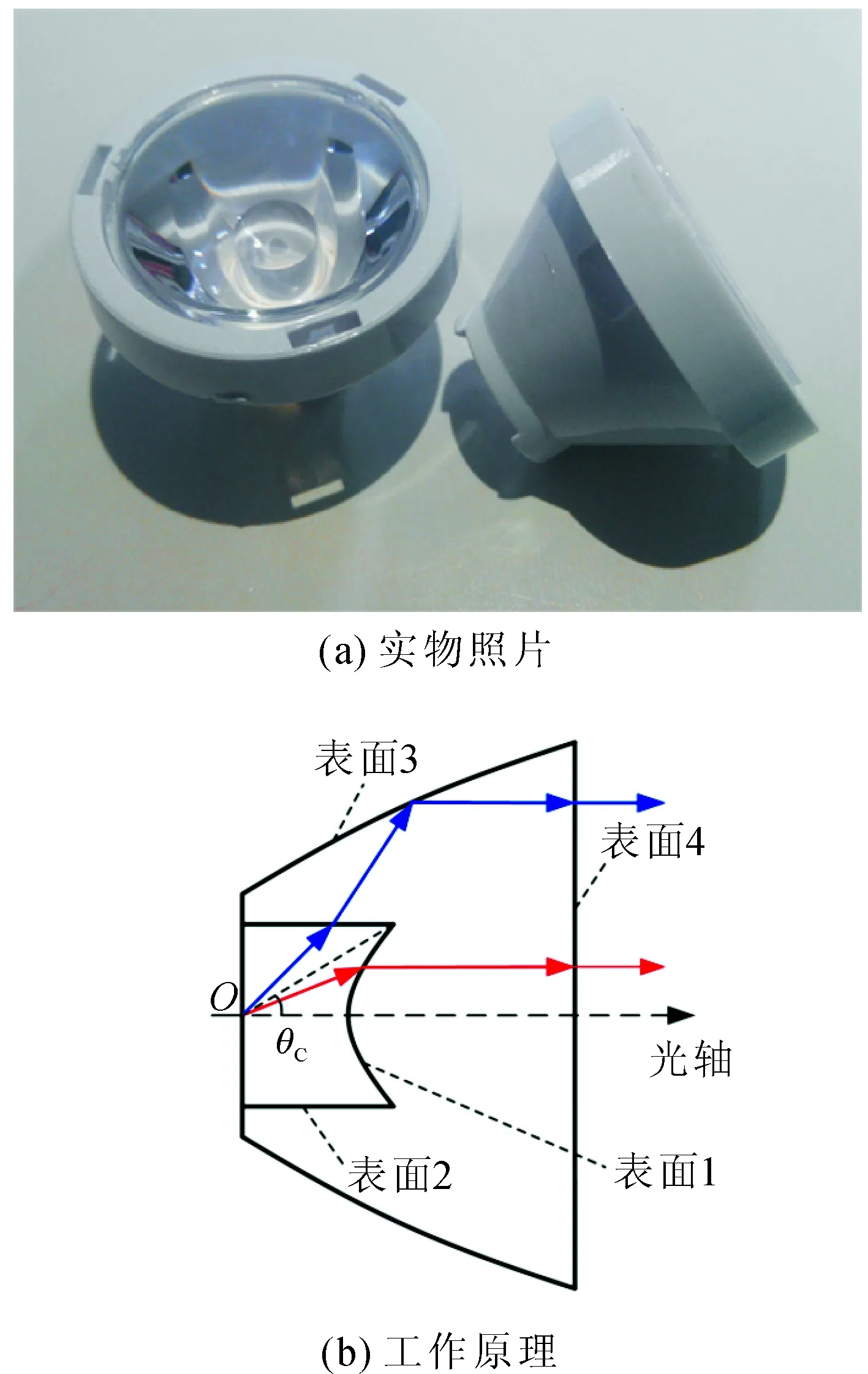
图5 TIR准直器Fig.5 TIR collimator
随着大功率LED的广泛应用,学者们研究出了许多设计TIR准直器的方法,但是,这些研究工作大多是针对照明、投影等应用场合而设计,主要追求目标面照度的均匀性,对光束的发散角没有特殊要求。目前市场上可以购买到的TIR准直器的最小出光发散角为5°,可用于以LED作为主动探测光源的实验室仪器系统,但对于遥感探测的光学雷达来说仍然很大,需要设计二级准直光路。本文选用发散角为5°的TIR准直器对LED光束进行一级准直,为了便于二级准直光路的设计,建立了TIR准直器的模型,并在ZEMAX中进行仿真。
图5(b)中,折射面表面1和表面4中间部分可以看作是非球面凸透镜,根据光路可逆原理,平行光通过凸透镜汇聚在光源点处,可通过ZEMAX光学设计软件设计表面1的参数。图6为折射面的光线追迹图和点列图。从图6(b)的点列图可以看出,该设计聚焦效果很好,根据图6(a)可以得到临界角θc的值。
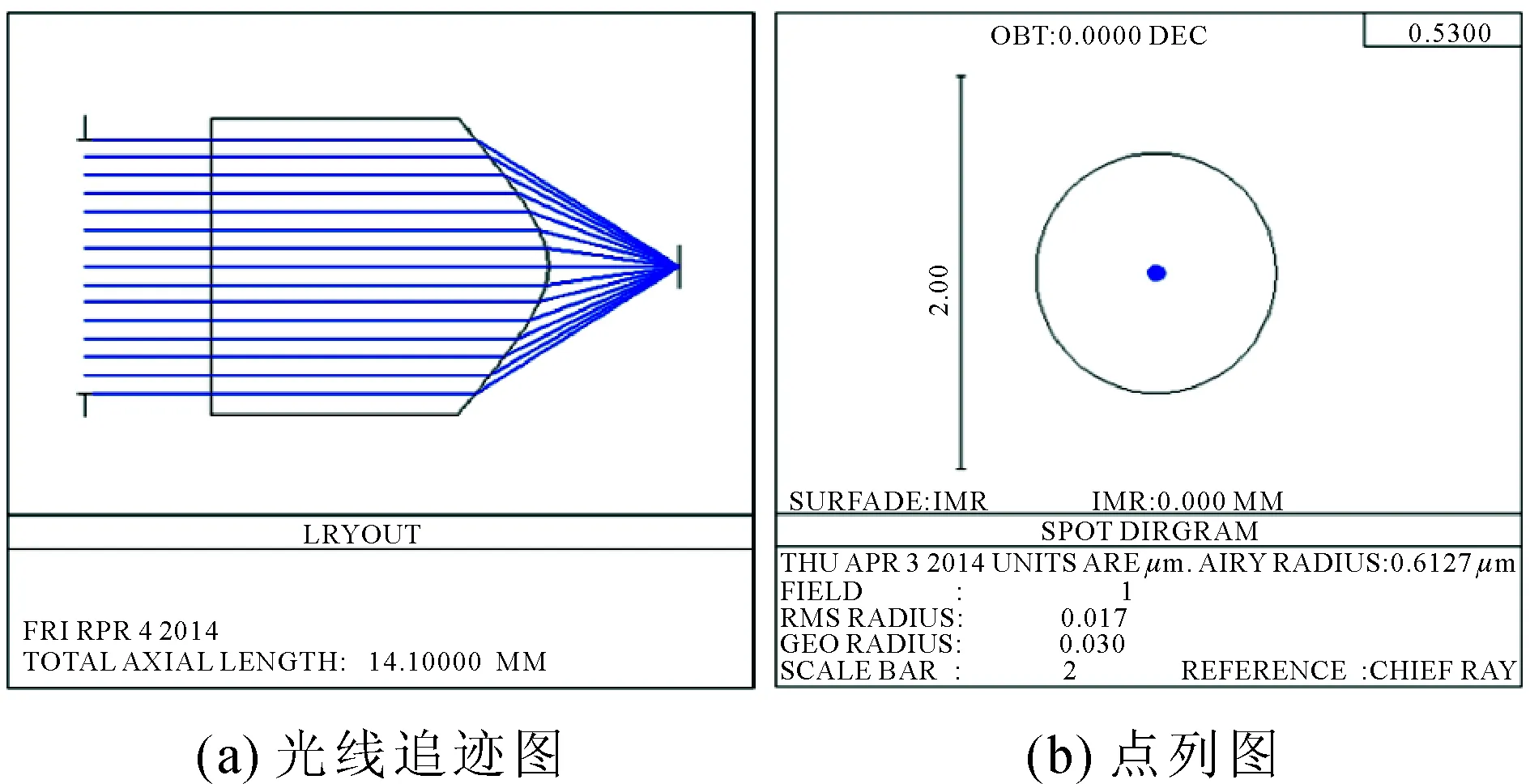
图6 折射面的光线追迹图和点列图Fig.6 Ray tracing and spot diagram of refraction surface
全反射面(表面3)比较复杂,需要建立全反射面轮廓线的数学模型来实现,如图7所示。
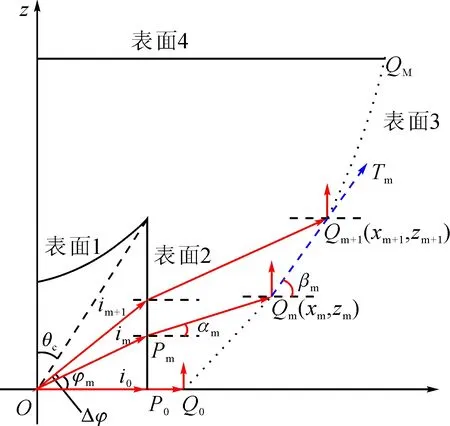
图7 全反射面设计原理Fig.7 Design principle of total reflection surface
设与x轴夹角为φm的光线im入射到表面2的Pm点上,经折射后入射到轮廓线上的Qm(xm,zm)点,经全反射后出射光线平行于z轴。根据折射定理可知:
sinφm=n·sinαm
(2)
式中,αm为光线在点Pm折射后光线的折射角,n为准直器材料的折射率。由图7中的几何关系可得:
(3)
(4)
式中,OP0为灯珠半径。
改变光线一个微小角度Δφ得光线im+1,计算Qm点的切线斜率tanβm,光线im+1经表面2折射后的光线与Qm点的切线Tm相交于Qm+1(xm+1,zm+1),则:
(5)
那么在已知Qm(xm,zm)情况下,再结合式(2)~(5),即可求得Qm+1(xm+1,zm+1)。
已知灯珠半径OP0,由光线i0开始,夹角φ0=0,取Δφ=0.1 rad,Q0为(3.3,0),借助数学迭代法计算全反射面的轮廓曲线,依次计算出M个Q点的坐标,再将数据进行8阶多项式拟合得到表面3轮廓曲线多项式:
(6)
式中,Z0为非球面顶点偏离坐标原点O的距离,Ci为多项式系数,这就是全反射面轮廓线的表达式。
根据上述方法在ZEMAX中仿真出完整的全内反射式准直器,如图8所示。图9是光束经该准直器准直后的光强分布。点光源经准直后发散角为0.3°,但实际的LED为1 mm×1 mm的面光源,经准直后发散角为5°,与实际使用的TIR准直器出光发散角相等,在此基础上进行二级准直光路的设计。
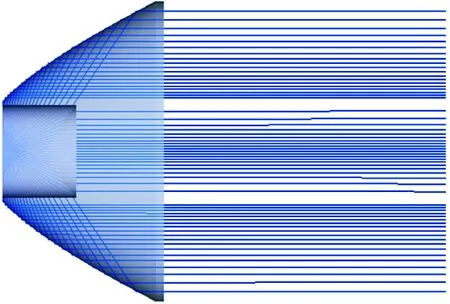
图8 全内反射式准直器的点光源光线追迹图Fig.8 Ray tracing of total internal reflection collimator
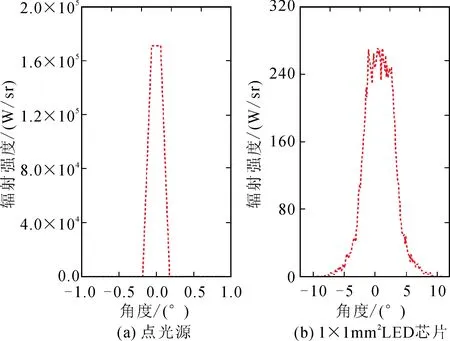
图9 全内反射式准直器出射光的光强分布Fig.9 Radiant intensity of total internal reflection
3.2 二级准直原理与设计
二级准直采用逆向开普勒望远镜结构来实现。开普勒望远镜原理如图10所示,由两个凸透镜构成,平行于光轴的光线经开普勒望远镜结构后平行于光轴出射,与光轴夹角为-ω的光线会以与光轴夹角为ω′的角度出射,根据开普勒望远镜的原理有如下关系式:
(7)

图10 开普勒望远镜原理Fig.10 Principle of Kepler telescope
将固定了TIR准直器的LED放置于开普勒望远镜的出瞳位置,逆向使用开普勒望远镜,可将光束的发散半角从ω′压缩到ω,设计原理如图11所示。
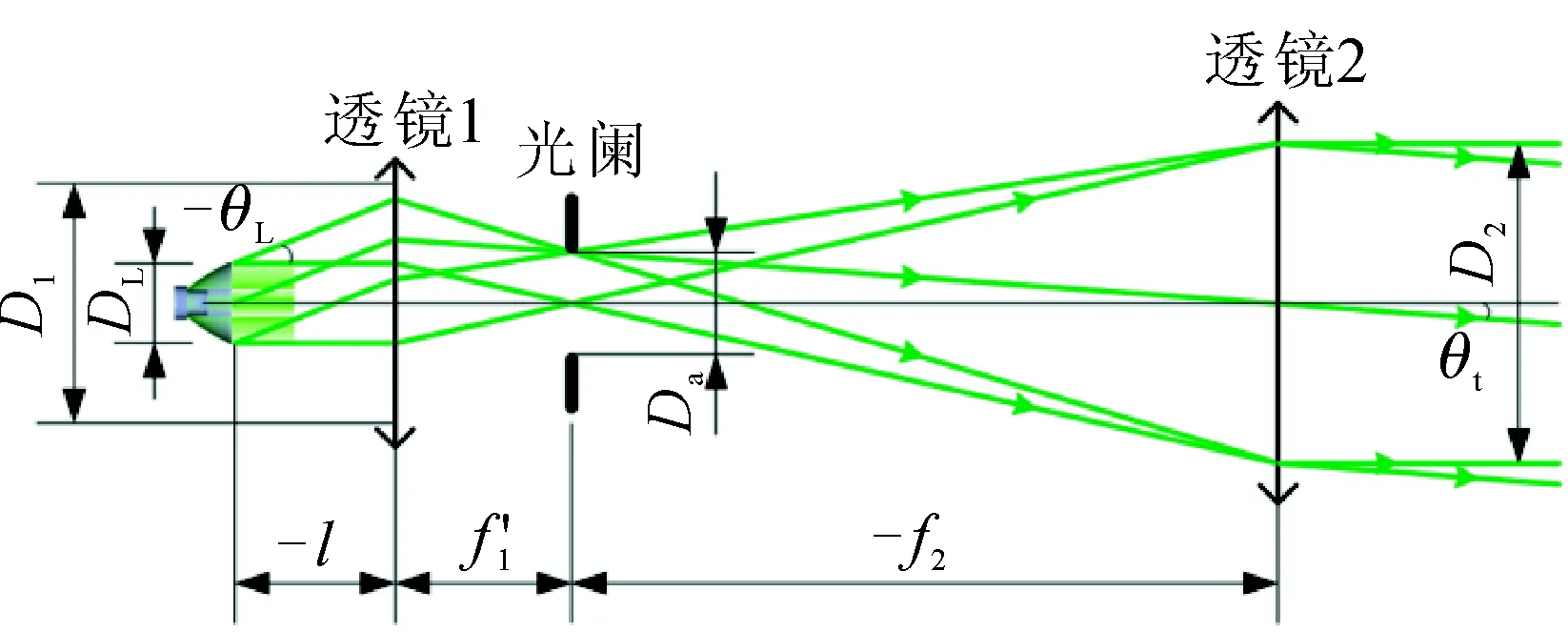
图11 准直光路设计原理Fig.11 Design principle of collimating light path
已知TIR透镜的直径DL为17.5 mm、发散半角-θL为2.5°,根据实际常用透镜焦距尺寸,透镜1选择焦距为50.8 mm的平凸透镜,透镜2选择焦距为175 mm的平凸透镜,由开普勒望远镜原理得:
(8)
则θt=12.7 mrad,另外根据以下三式:
(9)
D1=DL+2·(-l)·tanθL
(10)
(11)
可得-l=65.5 mm,D1=23.2 mm,D2=60.3 mm。
此时已将发散半角压缩至12.7 mrad,光阑直径Da与θt有如下关系:
(12)
则Da=4.4 mm。
一般情况下,光阑的作用是限定光束的宽度或成像范围,这里通过减小光阑直径Da来进一步压缩发散角,但光阑越小,出光光束能量越低,准直光路的光能利用率越低。
利用ZEMAX对上述准直光路进行光学模拟,光线追迹如图12所示,图13为距离光源40 m远处光束截面的光能分布。

图12 准直光路光线追迹图Fig.12 Ray tracing of collimating light path
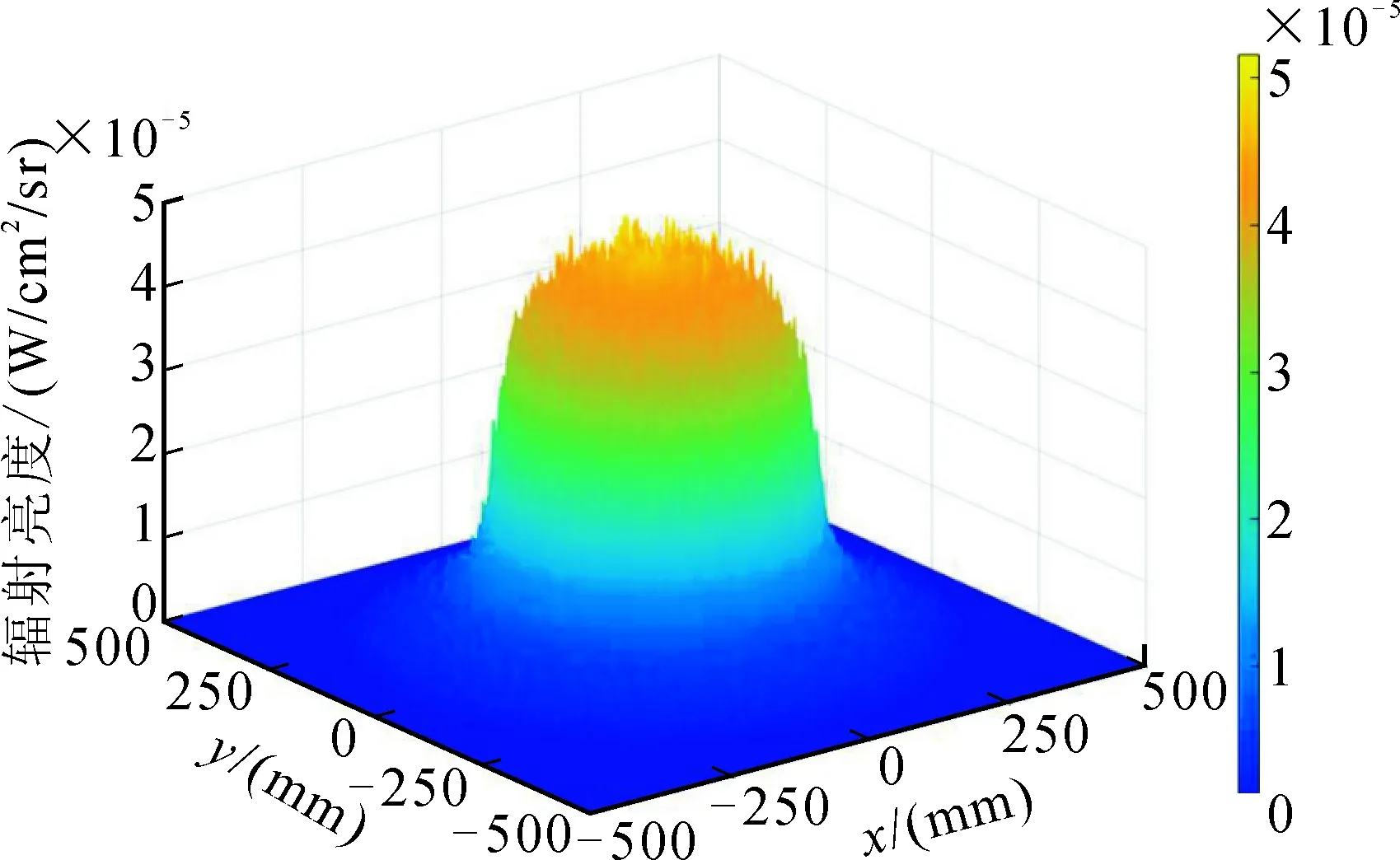
图13 光束截面能量分布Fig.13 Energy distribution of beam cross section
图12中,LED发出的光线,经过整个准直光路后,平行于光轴出射,在垂直于光轴的截面形成圆形光斑。从图13可以看出,在距离光源40 m远处形成的光斑的绝大部分能量比较均匀地分布在圆内,只有很小部分的能量分布在圆外,这种光束强度均匀分布的光源对于气溶胶探测雷达是比较理想的遥感光源。
表2列出了光阑直径不同时,发散角与光路的光能利用率之间的关系。LED发出的脉冲光束的能量是一定的,即30 nJ,从表2可以看出,光阑越小,发散角越小,能量利用率越低,但是发散角过大,也会影响雷达的探测距离,雷达光源期望有小的发散角同时兼有较高的能量。
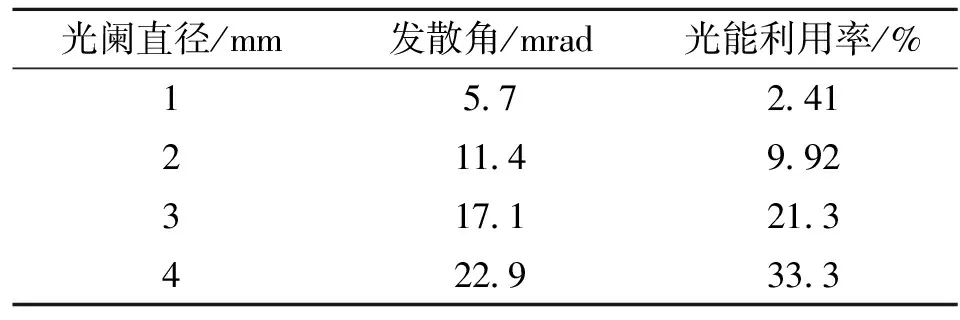
表2 LED光源准直光路特征参数Tab.2 Parameters of collimating light path for LED source
4 LED光源的应用分析与实验验证
4.1 LED光源的性能参数
根据上述设计制作LED光源。采用美国CREE公司的XLamp XR-E Q5型5W绿光LED,光谱如图14所示,耐温-45℃~135℃,可于四季在户外使用,适用于气溶胶探测雷达。全内反射式准直器采用与XLamp XR-E Q5型LED适配的CREE XRE-5°透镜,该透镜采用聚甲基丙烯酸甲酯(PMMA)材质,出射光直径为17.5 mm,透光率为95%,可将LED光束发散角准直到5°以内。选择大恒光电的GCL-0101系列平凸透镜和可变光阑搭建二级准直光路,透镜参数如表3所示。

图14 LED的相对光谱功率分布图Fig.14 Relative spectrum power distribution of LED
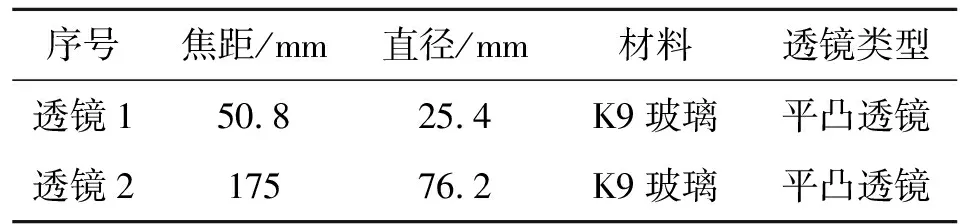
序号焦距/mm直径/mm材料透镜类型透镜1508254K9玻璃平凸透镜透镜2175762K9玻璃平凸透镜
最终研制的LED光源的主要性能参数如下:①峰值波长:530 nm;②LED单脉冲能量:30 nJ;③光脉冲宽度:200 ns;④脉冲重复频率:100 kHz;⑤出射光束发散角:在5.7~22.9 mrad范围内可调(发散角越小,出射光束能量越小,出光效率详见表2)。
4.2 仿真分析
根据上述性能参数,对该LED光源应用于气溶胶探测光学雷达时,雷达的探测盲区和探测能力进行仿真,验证该光源的可应用性。
LED光源雷达结构如图15所示,采用共轴模式,右边ABCD分别代表了光束与望远镜接收视场的重叠状态,绿色为光束截面,蓝色为望远镜视场截面,阴影为两者重叠部分。在一定距离处,发射光束与望远镜视场的重叠面积与发射光束光斑面积的比值,称为雷达的几何重叠因子YG(R),而两者未发生重叠的距离范围,即YG(R)=0的区域,称为雷达的探测盲区。本文所设计的LED光源发散角可调,发散角越大,光束进入望远镜视场的距离越近,探测盲区越小,但当光源发散角大于望远镜接收视场角时(图15中由绿色虚线说明),望远镜视场将不能覆盖光束,如图15中D状态所示。分别取发散角为5.7 mrad、11.4 mrad、17.1 mrad、22.9 mrad来分析,望远镜视场角取12 mrad,LED光源雷达的几何重叠因子随距离变化曲线如图16所示。
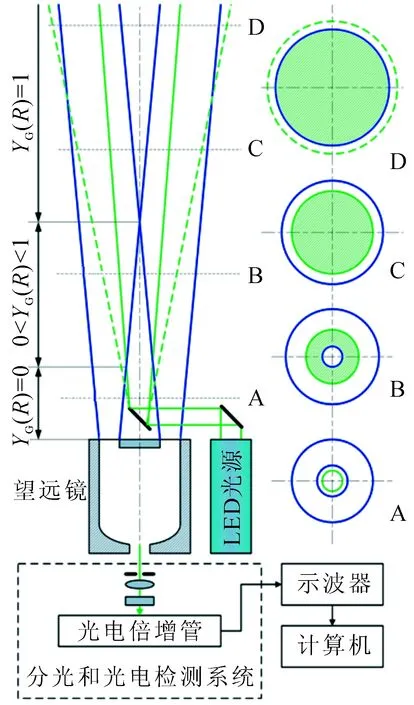
图15 共轴LED光源雷达结构示意图Fig.15 Structure of coaxial LED light source radar
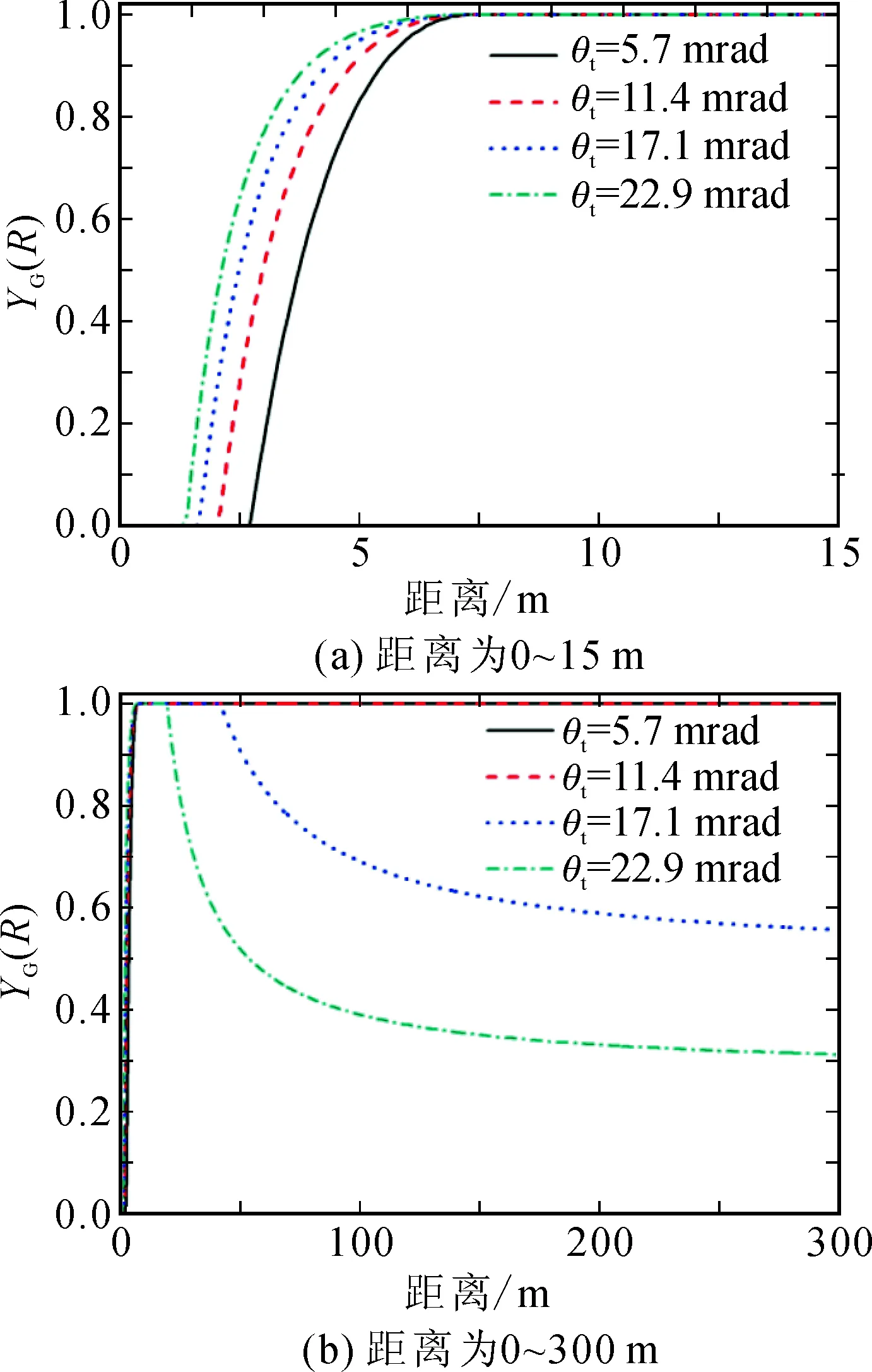
图16 几何重叠因子Fig.16 Geometric overlap factor
从图16(a)可以看出,探测盲区最大不到3 m,9 m后发射光束完全进入接收视场。图16(b)中,当发散角小于视场角时,即发散角为5.7 mrad和11.4 mrad的情况,距离超过9 m时,YG(R)始终为1;而发散角大于视场角时,即发散角为17.1 mrad和22.9 mrad的情况,几何重叠因子在某距离之后发生衰减,这是因为发散角大于视场角时,随着距离增加,光束光斑将大于望远镜视场,光束能量不能全部被接收。
利用美国标准大气模型对LED光源雷达的探测能力进行仿真,设置望远镜口径为254 mm、接收视场角为12 mrad,滤光片中心波长531 nm、带宽22 nm,光电倍增管(PMT)的量子效率为15%,仿真结果如图17所示。
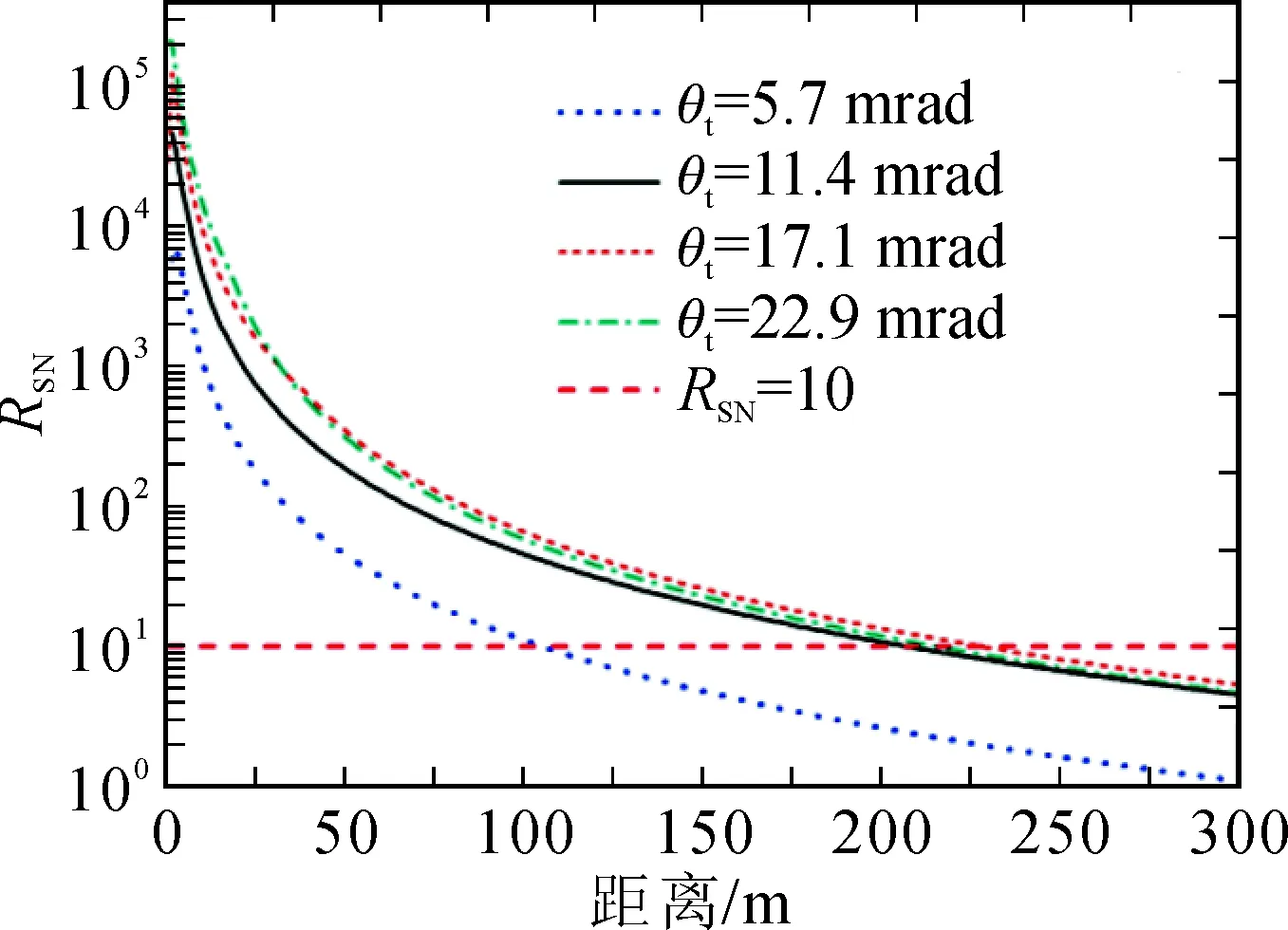
图17 LED光源雷达夜晚探测信噪比仿真Fig.17 Signal to noise ratio simulation of LED light source radar at night
图17为接收视场角θr=12 mrad时,不同光束发散角下,LED光源雷达夜晚探测信噪比RSN仿真曲线。当θt=5.7 mrad时,发散角小于接收视场角,由于光束出射能量低,探测距离仅105 m;当θt=11.4 mrad时,发散角仍小于接收视场角,由于光束出射能量提高,探测距离增加到210 m;当θt=17.1 mrad和22.9 mrad时,能量较大,本应探测得更远,但由于发散角大于接收视场角太多,几何重叠因子小于1,部分光束超出接收视场,光能利用率低,探测距离没有显著提升。
4.3 实验验证
设置LED光源的发散角为11.4 mrad和22.9 mrad,搭建雷达系统进行探测尝试,系统参数如表4所示。图18为同一夜晚发散角为11.4 mrad和22.9 mrad时的回波信号对比。由表2知,发散角为22.9 mrad时,光源出光能量是发散角为11.4 mrad时的三倍多,但从图18中可以看出,近处发散角为22.9 mrad时的回波信号比发散角为11.4 mrad时大,可是两者在200 m后信号都很弱,发散角为22.9 mrad时并不比发散角为11.4 mrad时探测得更远,此结果与上述仿真结果一致。考虑到几何重叠因子小于1会增加后续数据反演的复杂度,故光源的发散角取11.4 mrad。
最终设置发散角为11.4 mrad进行实验。图19为2016年6月20日和21日晚LED光源雷达水平观测结果。可以看出,雷达系统可以接收到近距离210 m处的大气回波,说明该LED光源可以用于气溶胶探测雷达。

表4 LED光源雷达参数Tab.4 Parameters of LED light source radar
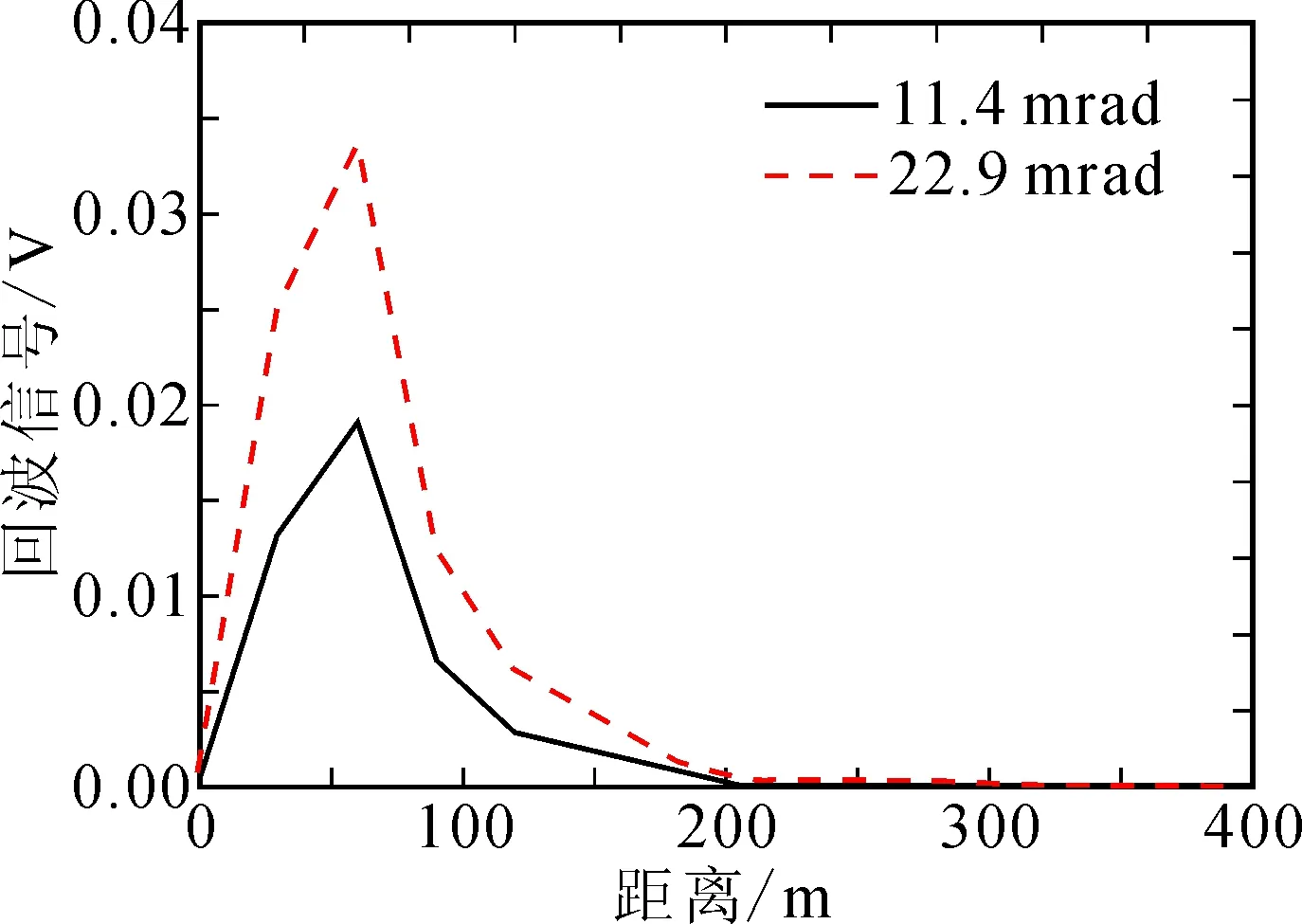
图18 发散角不同时回波信号对比Fig.18 Comparison of echo signals at different divergences
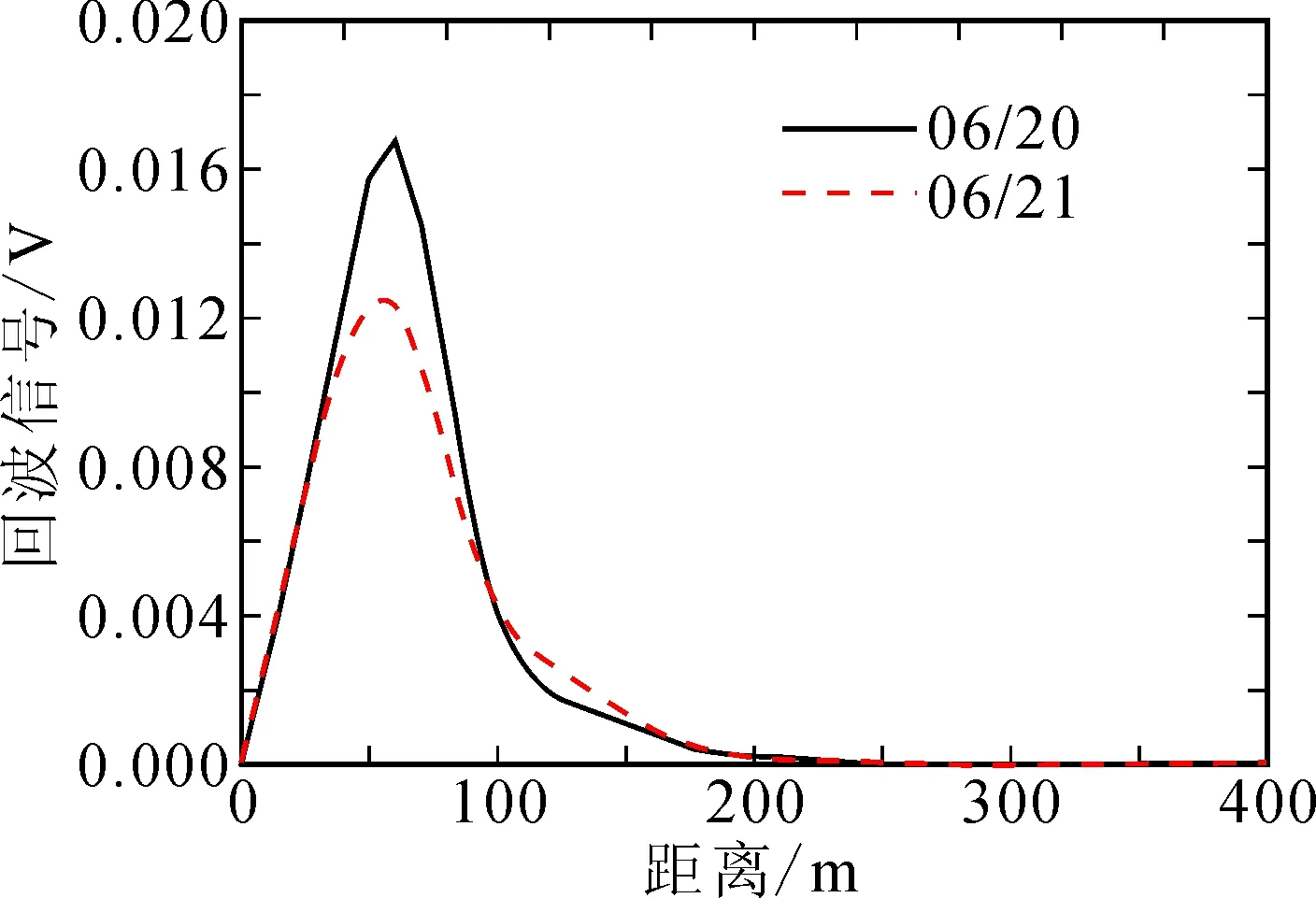
图19 夜晚水平探测回波信号Fig.19 Echo signal for horizontal detection at night
5 结 语
本文研制了一款应用于低空气溶胶探测雷达的LED光源,利用快速功率场效应管实现了LED光源的纳秒级脉冲驱动,在ZEMAX中建立了TIR准直器的模型,并结合开普勒望远镜结构设计了准直扩束光路,实现了LED光束的毫弧度级准直。通过光源的应用分析说明,LED光源雷达探测盲区小。利用美国标准大气模型进行探测信号信噪比仿真,结果表明,雷达的探测距离可达210 m。通过水平观测实验进一步说明,该光源可以用于气溶胶探测雷达。该光源能量对眼安全,盲区很小,这使LED光源雷达更适用于城市内的近程气溶胶探测。
参考文献:
[1] 韩永, 王体健, 饶瑞中, 等. 大气气溶胶物理光学特性研究进展 [J]. 物理学报, 2008, 57(11): 7396 -7407.
HAN Yong, WANG Tijian, RAO Ruizhong, et al. Progress in the study of physic optics characteristics of atmospheric aerosols [J]. Acta Physica Sinica, 2008, 57(11): 7396-7407.
[2] 刘思含, 周春艳, 毛学军, 等. 大气气溶胶主被动遥感探测应用技术进展 [J]. 环境与可持续发展, 2016,41(4): 131-135.
LIU Sihan, ZHOU Chunyan, MAO Xuejun, et al. Advances in the application of active and passive remote sensing monitoring of atmospheric aerosol [J]. Environment and Sustainable Development, 2016,41(4): 131-135.
[3] 华灯鑫, 宋小全. 先进激光雷达探测技术研究进展 [J]. 红外与激光工程, 2008, 37(增刊3): 21-27.
HUA Dengxin, SONG Xiaoquan. Advances in lidar remote sensing techniques [J]. Infrared and Laser Engineering, 2008, 37(S3): 21-27.
[4] 狄慧鸽, 侯晓龙, 赵虎, 等. 多波长激光雷达探测多种天气气溶胶光学特性与分析 [J]. 物理学报, 2014, 63(24): 244206.
DI Huige, HOU Xiaolong, ZHAO Hu, et al. Detections and analyses of aerosol optical properties under
different weather conditions using multi-wavelength Mie lidar [J]. Acta Physica Sinica, 2014, 63(24): 244206.
[5] 万运佳, 林浩博, 刘杰, 等. 超高光效小聚光角度的均匀配光LED透镜设计 [J]. 激光与光电子学进展, 2016, 53(12): 122202.
WAN Yunjia, LIN Haobo, LIU Jie, et al. Design of LED lens with ultra-high light efficiency and small light-gathering angle for realizing uniform light distribution [J]. Lasre & ptoelectronics Progress, 2016, 53(12): 122202.
[6] 张航, 梁雪, 严金华, 等. LED准直器设计中复合抛物面同步多曲面方法 [J]. 光学学报, 2012, 32(9): 0922004.
ZHANG Hang, LIANG Xue, YAN Jinhua, et al. Compound parabolic concentrator-simultaneors multiple surfaces design methods for collimators [J]. Acta Optica Sinica, 2012, 32(9): 0922004.
[7] CHEN J J, LIN C T. Freeform surface design for a light-emitting diode-based collimating lens [J]. Optical Engineering, 2010, 49(9): 093001.
[8] 苏宙平, 阙立志, 朱焯炜, 等. 用于LED光源准直的紧凑型光学系统设计 [J]. 激光与光电子学进展, 2012, 49(2): 022203.
SU Zhouping, QUE Lizhi, ZHU Zhuowei, et al. Optical system design of the compact collimator for LED source [J]. Laser & Optoelectronics Progress, 2012, 49(2): 022203.
猜你喜欢
现代电子技术(2022年18期)2022-09-17
阅读(科学探秘)(2022年5期)2022-06-07
科学技术创新(2021年25期)2021-09-11
奥秘(2021年3期)2021-04-12
中国医疗设备(2019年1期)2019-01-15
中学数学杂志(初中版)(2016年3期)2016-06-24
红领巾·探索(2014年1期)2015-03-16
汽车维护与修理(2015年6期)2015-02-28
今日中学生(初一版)(2013年4期)2013-06-07
航天返回与遥感(2011年6期)2011-10-11