空间服务机器人自适应递归控制*
2018-04-18 07:24解永春王云鹏
飞控与探测 2018年1期
解永春,王云鹏
(1.北京控制工程研究所·北京·100194;2.空间智能控制技术重点实验室·北京·100190;3.天津市微低重力环境模拟技术重点实验室·天津·300301)
0 引 言
自从1956年第一颗人造卫星发射以来,全球已经执行过4000多次空间发射任务。这导致了大量的太空垃圾,包含失效卫星、卫星碎片、航天员丢失的设备等。对于所有的空间航天器来说,快速增长的空间碎片数量,甚至会导致凯斯勒现象[1]。为了防止此类现象发生,必须采用在轨服务技术对空间垃圾进行清理,对失效卫星进行修复,以减小太空垃圾的危害。技术试验卫星七号(EST-VII)[2]和轨道快车等试验卫星[3]的成功经验,进一步证明了在轨服务的可行性。
在轨抓捕是很多在轨服务的基础,而空间机械臂控制是在轨抓捕的核心技术。因此本文重点研究了空间机械臂的控制问题。根据服务航天器基座的控制策略,服务航天器可以工作在三种模式下:1)自由漂浮模式 (基座处于非控状态);2)自由飞行模式 (基座处于完全控制状态);3)姿态控制模式 (基座姿态处于受控状态、位置自由移动)[4]。自由漂浮模式可以节省卫星燃料,但是机械臂的工作空间受限;相反地,自由飞行模式具有更大的工作空间,但会消耗更多能量。对于很多在轨抓捕任务,服务航天器需要实时调整基座位姿,以保持和目
标航天器较为稳定的相对位姿。本文主要研究在自由飞行模式下的服务航天器的控制。
在实际应用中,空间服务航天器控制面对的一个重要问题是其参数的未知。由于自适应控制方法具有处理参数未知的能力,因此目前已经有大量的自适应控制方法,例如机械臂动力学等价法[5]、增广规范型法[6]、神经网络法[7-8]、综合自适应方法[9]等。这些方法的一大劣势是计算效率较低,很大程度上限制了其实际应用范围。为了提高计算效率,文献[10]为自由漂浮机械臂,提出了一种递归自适应控制方法。本文旨在为装有多个机械臂的空间机器人提供一种递归自适应控制方法。本文结合直接路径法和空间向量,建立了装有多空间机械臂的空间服务机器人的牛顿-欧拉递归动力学模型。文中,假设空间服务机器人的精确模型参数未知(质量、惯量、质心等),提出了一种自适应控制器,并证明了采用该控制器时空间服务航天器可以跟踪其理想轨迹。为便于编程实现,受文献 [10]启发,给出了控制器的递归形式。最后文中对一个装有2个机械臂的空间服务航天器进行了仿真试验,证明了控制器的正确性和有效性。
记号:1n=(1,…,1)∈Rn,0n=(0,…,0)∈Rn,E n表示n×n单位矩阵;0m×n∈Rm×n表示m×n零矩阵。
对于一个三维向量v=(v1,v2,v3)T,叉乘计算符×定义为

对于2个笛卡尔坐标系F A和F B,将三维向量从F A旋转到F B的旋转矩阵记为B R A;对于空间向量从F A转移到F B的位移转移矩阵记为

其中,r是从F A的原点指向F B原点的位置向量。对应的力转移矩阵为


1 问题描述及公式化
1.1 问题描述
考虑如图1所示的在轨服务场景:一个装有机械臂的服务航天器抓捕一个非合作目标航天器,例如失效卫星、航天器碎片等。服务航天器装有机械臂是一个空间服务机器人,可以对目标航天器实施抓捕。服务航天器基座装有相对位姿测量敏感器,可以测量服务航天器与目标航天器之间的相对位姿。机械臂末端装有手眼相机可以测量机械臂末端与抓捕点之间的相对位姿。

图1 服务航天器在轨服务
整个抓捕任务可以分为4个阶段[11]:1)接近段;2)机械臂接近段;3)抓捕段;4)抓捕后段。本文主要关注第二阶段,此阶段的控制目标为使机械臂末端与抓捕点相对位姿减少到零。这个控制目标可以由以下三步实现:1)为机械臂末端设计理想轨迹 (位置和姿态);2)根据机械臂逆运动学计算出机械臂关节空间的理想轨迹,以及基座位姿的理想轨迹;3)设计航天器控制器,使基座和机械臂分别跟踪其理想轨迹。因此本文研究的问题本质上就转换为跟踪控制问题。上述第二步中的理想关节轨迹,可以通过采用阻尼最小二乘法[12]、CCD(cyclic coordinate decent,循环坐标下降法法)[13-14]等逆运动学求解方法得到,由于不是本文的研究重点,这里不再做详细介绍。
服务航天器有三种工作模式:自由漂浮模式、基座姿态受控模式和自由飞行模式。自由漂浮模式是指在抓捕过程中,只控制机械臂,而服务航天器基座处于非控状态;基座姿态受控模式是指只控制基座姿态,对其位置不予控制;自由飞行模式是指同时控制基座和机械臂。显然自由飞行模式具有更大的工作空间,因此本文只讨论自由飞行模式下的服务航天器控制。
1.2 问题公式化
假设服务航天器装有N个链式机械臂,第n个机械臂的关节数为L n,那么服务航天器的总自由度为(包含基座的6个自由度)。
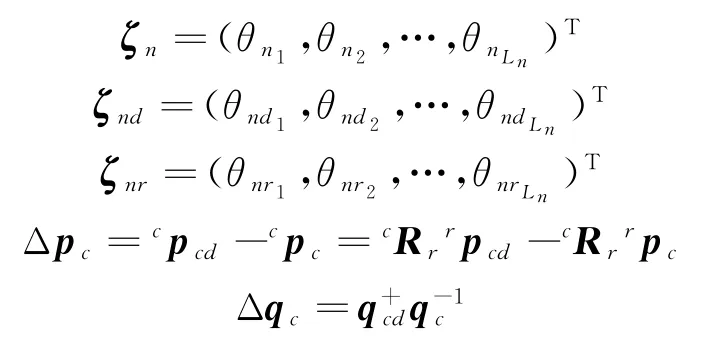
第n个机械臂的第i个关节记为关节n i,其关节角为,其理想关节角记为。基座的位置向量记为p b∈R3,基座的姿态四元数为q b∈R4;基座的理想位置和理想姿态为p bd∈R3和q bd∈R4。本文的控制目标数学描述如下

2 预备知识
2.1 坐标系
文中采用修正的Denavit-Hartenberg参数对机械臂进行建模[15]。如图2所示,每个连杆都固连一个由连杆次序命名的坐标系,例如坐标系F ni固连在连杆n i上。坐标系F ni的x、y和z轴分别记为x ni、y ni和z ni。坐标系F ni由以下4条原则确定:

图2 空间机械臂坐标系
1)原点O ni在关节n i的中轴线和关节n i+1的中轴线的公垂线与关节n i的中轴线的交点处;
2)坐标系z ni与关节n i轴线方向相同;
3)坐标系x ni沿着关节n i的中轴线和关节n i+1的中轴线的公垂线指向关节n i+1;
4)坐标系y ni由右手定则确定。
图2中,αn i为关节n i的关节转角,θni为关节n i的关节角。那么由坐标系F n i到坐标系F n i+1的旋转矩阵为

2.2 空间向量
空间向量为研究空间刚体动力学提供一种简单有效的工具,本节将简要介绍一下空间向量,更多知识请参考文献 [16]。一个刚体的空间速度定义为

其中,v∈R3和ω∈R3分别为线速度和角速度。对于连杆n i在点O ni的空间速度为

对应的空间加速度为

作用在刚体上空间力定义为

其中,f∈R3和m∈R3分别为作用在刚体上的力和力矩。连杆n i的受力分析如图3所示,其中f ni和m ni为连杆n i-1对连杆n i的力和力矩。那么连杆n i-1对连杆n i的空间力为
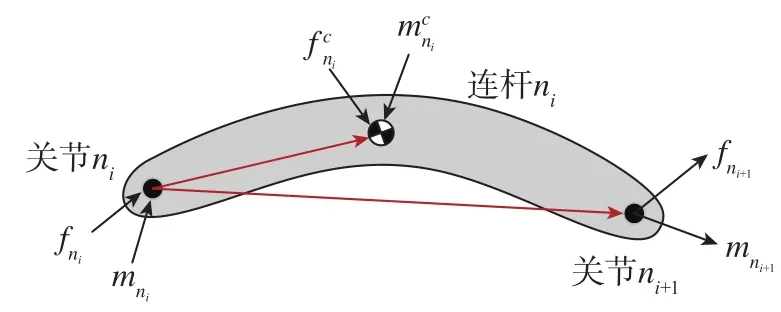
图3 连杆受力分析
由坐标系F ni到坐标系F ni+1的空间转移矩阵为

连杆n i相对于F n i的空间惯量矩阵为

其中,m ni为连杆n i的质量。由文献[10]可知惯量矩阵可以参数化为,其中P l和γnil(i=1,…,10)的定义在文献 [10]中给出。
2.3 动力学模型
利用空间向量和直接路径法,多机械臂空间机器人的递归动力学可写为

定义如下2个广义向量:

那么多机械臂空间机器人的动力学可写为如下的闭环形式

其中,M∈RN a×Na和C∈RNa×Na分别为惯量矩阵和科里奥利矩阵。上述闭环动力学假设具有以下性质:
1)惯性矩阵M是对称正定矩阵,即M>h E N,其中h>0。
2)M-2C是斜对称矩阵。
3 自适应控制器
3.1 控制器设计
首先来看空间机器人的理想轨迹。将追踪器基座的理想位置和理想姿态记为和,理想速度和角速度记为,机械臂关节n i理想关节角记为θndi,基座的理想的空间速度记为
为机械臂n和基座设计空间参考速度如下
其中
基于上述参考速度,定义2个滑模变量如下
参考文献 [18-19]中提出自适应控制,空间机械臂的自适应控制器设计如下

3.2 收敛分析
对于控制器,有以下定理。
定理1 如果理想轨迹及其速度和加速度都一致有界,那么采用控制器 (2)时,由动力学 (1)描述的服务空间机器人可以跟踪上理想轨迹,即

其中,n=1,2,…,N,i=1,2,…,L n。

定义一个类李雅普诺夫函数


此外可以证明s是一致有界的,从而导出̇V是一致连的,这结合Barbalat引理就证明了,这就证明了。进一步可以证明

4 控制器的递归形式
虽然控制器式 (2)在理论上可以解决相应的追踪问题,但是控制中用到了极其复杂的回归矩阵,在实际应用中往往难以求取。为了解决这个问题,本节给出了控制器对应的递归形式如下


控制器:

其中

5 仿真算例
考虑如图4所示的装有2个机械臂的空间服务航天器,机械臂一有8自由度,机械臂二有6自由度。2个机械臂的参数如表1和表2所示。机械臂的理想位姿轨迹如下:

图4 装有2个机械臂的空间服务航天器
1)机械臂一:
理想位置

理想姿态

2)机械臂二:
理想位置

理想姿态


表1 机械臂一物理参数

表2 机械臂二物理参数
本仿真试验采用DLS(Damped Least Squar-es,阻尼最小二乘法)计算关节空间理想轨迹,限于篇幅这里不仔细介绍,细节请参考文献 [12]。采用控制器 (3),仿真结果如图5~图11所示。基座位姿曲线如图5和图6所示,可以看出,基座的位姿可以跟踪理想基座位姿曲线。2个机械臂的关节曲线和关节跟踪误差曲线如图7和图8所示,可以看出,2个机械臂都可以跟踪上理想的关节曲线。理

图5 基座姿态欧拉角 (度)

图6 基座位置曲线
论上只要基座和机械臂都跟踪上了理想曲线,那么空间机械臂就可以跟踪上理想的末端位姿曲线。图11给出了仿真全过程概况,其中末端灰色曲线为位置理想轨迹,灰色坐标系表示理想姿态;彩色曲线轨迹表示实际轨迹,彩色坐标系为实际姿态。末端位姿跟踪误差如图9和图10所示,可以看出,空间服务机器人可以很好地跟跟踪理想轨迹。仿真全过程的动画上视频参见文献 [20]。

图7 机械臂关节曲线 (度)

图8 机械臂关节跟踪误差 (度)
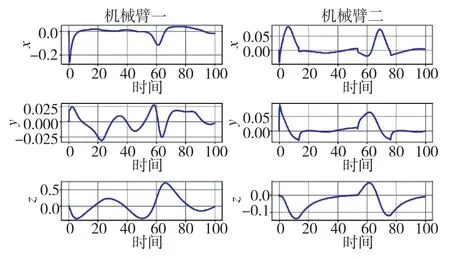
图9 机械臂末端欧拉角 (度)误差

图10 机械臂末端位置跟踪误差
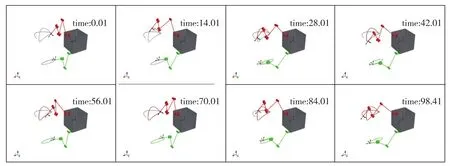
图11 仿真全过程
6 结 论
本文研究了装有多个机械臂的空间服务机器人的轨迹跟踪问题。提出了一种递归自适应控制器,并证明了采用该控制器时,空间服务航天器可以跟踪上理想轨迹。最后给出了一个仿真算例验证了控制器的正确性和有效性。
猜你喜欢
国际太空(2022年7期)2022-08-16
国际太空(2022年2期)2022-03-15
航天器工程(2022年1期)2022-02-21
华声文萃(2021年6期)2021-08-25
防爆电机(2021年2期)2021-06-09
意林(2021年10期)2021-05-28
中国科技纵横(2020年13期)2020-12-11
现代信息科技(2020年22期)2020-06-24
国际太空(2019年9期)2019-10-23
船舶标准化工程师(2019年4期)2019-07-24