常用坐标系之间的转换方法研究
2018-04-21 03:43刘可可陈亮马丽亚
中国设备工程 2018年7期
刘可可,陈亮,马丽亚
(中国船舶重工集团公司第七一三研究所,河南 郑州 450015)
在测量和GPS应用中,坐标系的概念及相互之间的转换是必不可少的,任何测量和绘图工作都要在一定的参考系中进行。在导航系统中常用到的坐标系包括地理坐标系、地心地固坐标系和导航坐标系。
1 坐标系概述
(1)地理坐标系(t系,hlL,,)。地理坐标系OX tttZY,其原点位于运载体所在的点,tX轴沿当地纬线指东, Yt轴沿当地子午线指北, Zt轴沿当地地理垂线指下并与 Xt, Yt轴构成右手直角坐标系。其中 Xt轴与 Yt轴构成的平面即为当地水平面; Yt轴与 Zt轴构成的平面即为当地子午面。
(2)地球坐标系(e系, X ,Y ,Z)。地球坐标系OXeYeZe,其原点取在地心,Ze轴沿极轴(地轴)方向,Xe轴在赤道平面与本初子午面的交线上, Ye轴也在赤道平面上并与 Xe, Ze轴构成右手直角坐标系。地球坐标系与地球固连,随地球一起转动,因此又称为地心固联(ECEF,Earth-Centered,Earth-Fixed)坐标系。地球绕极轴作自转运动,并且沿椭圆轨道绕太阳作公转运动。地球表面任意一点的位置均可用经度和纬度来确定。
(3)导航坐标系(n系, N ,E ,D)。导航坐标系是一种当地地理坐标系。它是指在导航时,根据导航系统工作所需要而选取的用来作为导航基准的坐标系。原点O在载体的重心,Oyn指向北,Oxn指向东,Ozn沿垂直方向指向地。故此坐标系亦称为北东地(NED)坐标系。
2 坐标系之间的转换
一个坐标系到另一个坐标系之间的转换,可以通过绕不同的坐标轴3次旋转来实现。假设直角坐标系OXYZ,绕X轴旋转一个角度α,坐标旋转矩阵用Cx(α)表示,则:
绕Y轴旋转一个角度β,坐标旋转矩阵用 Cy(β)表示,则:

绕Z轴旋转一个角度γ,坐标旋转矩阵用 Cz(γ)表示,则:

由上可知,坐标系之间的转换是通过 Cx(α)、Cy(β)、 Cz(γ)这3个独立变换的乘积得到的。
(1)地理坐标系与地球坐标系之间的转换。已知目标在地理坐标系下的纬度、经度、高度(L ,l ,h),计算在ECEF下的坐标(X ,Y ,Z),公式如下:
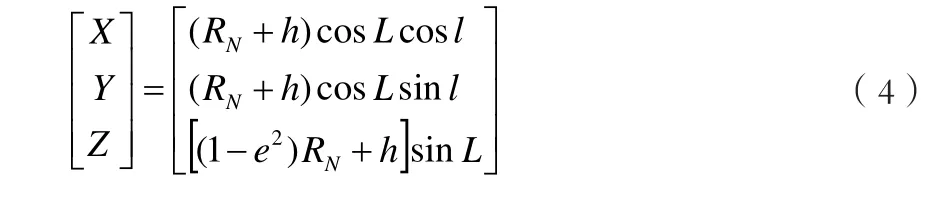
其中,l的取值是相对于格林威治子午线的。
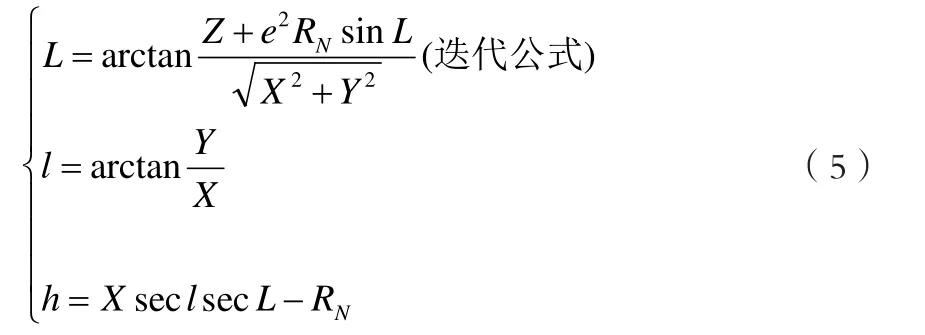
为了避免L的迭代,也可以采用以下公式计算L:

常采用以下公式计算h:
(2)地球坐标系(e系)与导航坐标系(n系)之间的转换。已知原点坐标记为纬度 L0、经度 l0和椭球高h0,根据公式(4)可以计算出地球的原点坐标 X0、 Y0、Z0。导航坐标(N ,E ,D)可以用下式计算得到:


从导航坐标到地球坐标的逆转换公式如下:
RN0为纬度 L0处的卯酉圈半径,
(3)地理坐标系(t系)与导航坐标系(n系)之间的转换。通过前面的介绍,导航坐标系可以由地理坐标系推算得到。也可以进行直接转换,其转换公式如下:
将导航坐标系坐标 ),,( DEN 逆变换为经度、纬度和高度 )h,,( lL ,具体过程如下所述。
首先将导航坐标系坐标转换为地理坐标系坐标,即计算 ),,( ZYX ,公式如下:

然后将地球坐标系坐标转换为地理坐标,公式如公式(5)所示,此处不再赘述。
3 仿真结果及分析
设置初始纬度L:36.41°,经度l:94.9°,高度h:4500米。下面以地球坐标系转换为地理坐标系为例,其仿真结果如下图1、2。
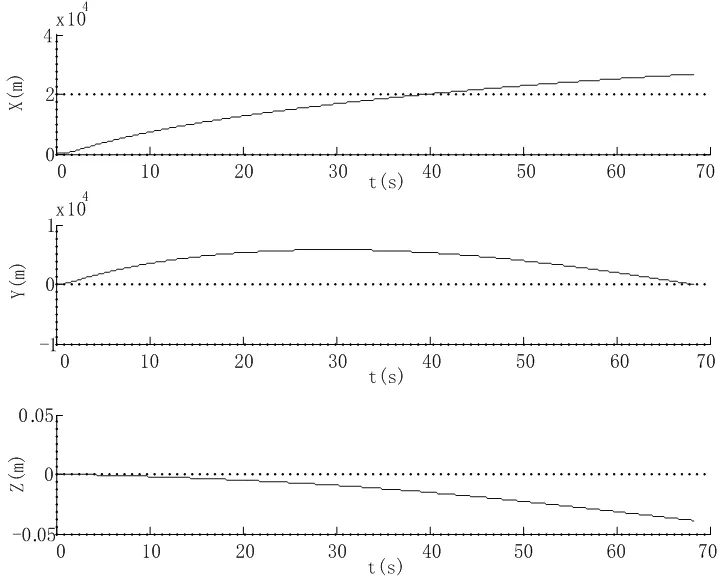
图1 地球坐标系下的曲线
从图2的曲线趋势可以看出,初始高度为4500米,升高到约10000米时落下,又到约同一个高度,并且纬度、经度变化不大,所以得出图1地球坐标系转换为图2地理坐标系,转换过程是对的。由以上两个图可以看出上述转换过程是正确的。
本文对于常用坐标系之间的转换方法研究,不仅对卫星、导弹等高精度定位提供重要技术,并且能够为组合导航系统数据进行密切衔接,实现数据融合等奠定基础。
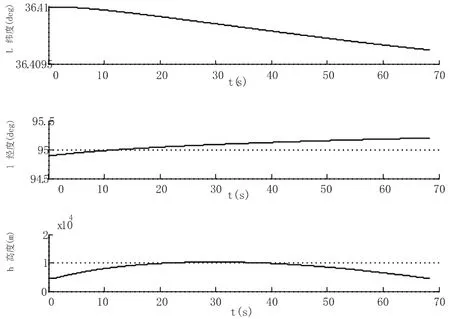
图2 地理坐标系下的曲线
参考文献:
[1]魏子卿.2000中国大地坐标系及其与WGS84的比较[J].大地测量与地球动力学,2008,28(5):1-4.
[2]MORITZ H.The Geodetic Reference System 1980[J].Journal of Geodesy,2000,(74):128-133.
[3]胡锐.惯性辅助GPS深组合导航系统研究与实现[D].南京理工大学,2010.
[4]胡瑞,薛晓中,孙瑞胜等.制导炸弹中坐标系转换的误差分析及修正[J].弹道学报,2008,20(4):36-40.
[5]王解先,王军,陆彩萍.WGS-84与北京54坐标转换的问题[J].大地测量与地球动力学,2003,20(3):70-73.

猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
中国惯性技术学报(2020年2期)2020-07-24
学校教育研究(2019年21期)2019-11-11
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
齐鲁周刊(2017年29期)2017-08-08
地理教育(2009年3期)2009-06-19
中学政史地·初中(2009年11期)2009-01-05