智能网联汽车的技术架构及测试方法
2018-04-24 03:13甘海云
天津职业技术师范大学学报 2018年1期
甘海云
(1.天津职业技术师范大学智能车路协同与安全技术国家地方联合工程研究中心,天津 300222;2.天津职业技术师范大学汽车与交通学院,天津 300222)
随着电子技术和计算机软件技术的不断发展,汽车的智能化水平也在不断推进。汽车的智能化是从电子化开始的,20世纪70年代,以汽车收音机和电子点火装置为代表的电子技术开始应用于汽车领域,随着集成电路和微处理器技术的发展,动力系统和底盘系统开始实现电子化,为智能汽车的发展奠定了基础。进入2000年以来,以自适应巡航控制(adaptive cruisecontrol,ACC)、自动紧急刹车(automaticemergency braking,AEB)和车道保持辅助(lane keeping assistance,LKA)为代表的高级驾驶辅助系统(advanced driver assistance system,ADAS)开始实现应用,实现了至少一种驾驶操作的自动化,达到自动化驾驶1级水平。目前,以Volvo XC90等达到2级自动化驾驶水平的汽车也开始批量投放市场。本文对智能网联汽车的分级及其技术体系架构、控制系统的功能框架和算法、智能网联汽车的测试评价方法及国际标准的制定现状等进行分析。
1 智能汽车的智能化等级概述
智能汽车的智能化等级分为自动驾驶等级和网联化等级2个方面。根据节能与新能源汽车技术路线图战略咨询委员会、中国汽车工程学会发布的资料,自动驾驶等级定义如表1所示[1]。
从表1中知,在自动驾驶1级和2级情况下,驾驶操作部分由机器完成,对驾驶系统的监控和失效应对由驾驶员执行,与现行法律对驾驶人员的要求一致。自动驾驶为3级以上时,由自动驾驶系统监控驾驶环境,当3级自动驾驶在系统失效时,要求驾驶员接管车辆的控制;4级自动驾驶系统失效时,系统对驾驶员提出响应请求,驾驶员也可以不响应。3级和4级自动驾驶在法律上都要求界定机器驾驶和驾驶员驾驶的责任。5级自动驾驶为最高级别的自动驾驶,驾驶操作的控制、监控和失效应对都由机器完成,因而机器驾驶承担法律责任,这与现行维也纳公约国际法对驾驶员是驾驶行为法律主体的描述相矛盾。为此,相关国家已经开始对自动驾驶车辆的法律问题进行研究和探讨,有望在未来制定出适应自动驾驶技术发展的相关法律。
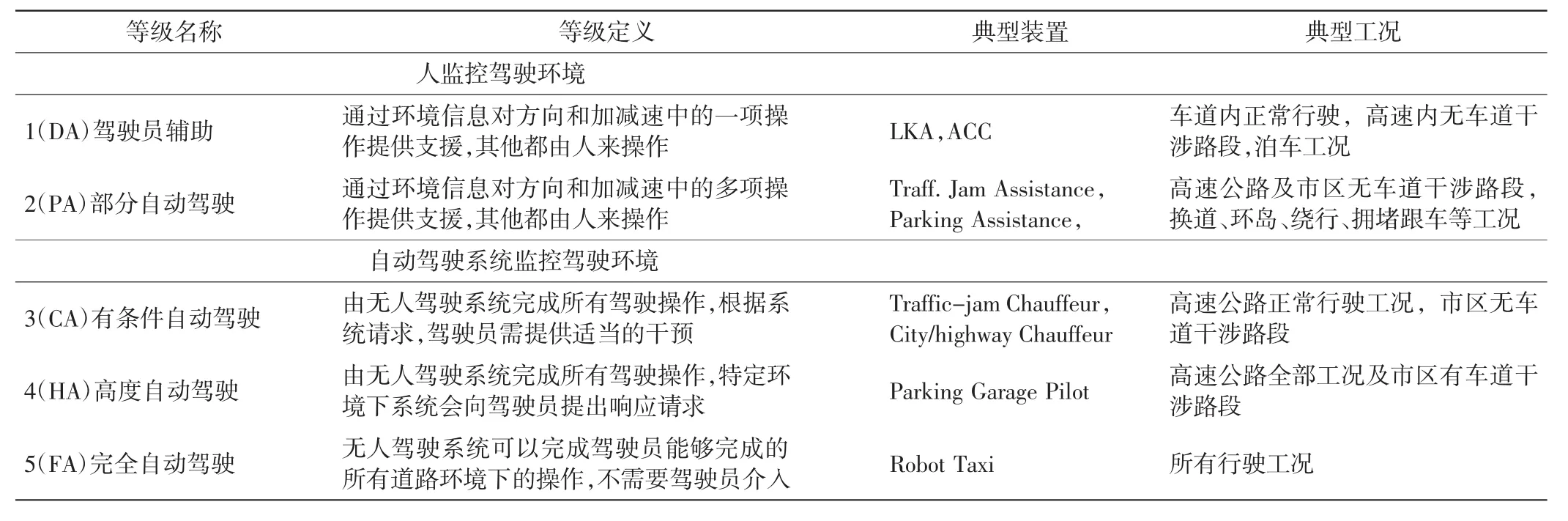
表1 自动驾驶等级
2 智能汽车技术体系架构及其控制系统
2.1 智能汽车技术体系架构
智能网联汽车除了依靠本车的物理传感器实现周边状态的感知外,还能够通过V2X(vehicle to vehicle(V2V),vehicle to infrastructure(V2I),etc.)通信技术在更大的空间尺度上扩展环境和交通状况的感知范围。在目前智能汽车环境感知传感器配置下,通过车载毫米波雷达、机器视觉、激光雷达和超声波雷达等物理传感器可实现自车物理传感器感知范围内(通常在200 m之内)环境和交通状态的感知。对于广域的交通拥堵状况、气象情况以及道路维修和道路事故等信息的感知,则可通过V2X通信技术获得自车物理传感器感知范围之外的交通信息。根据V2X通信获取信息的内容及其在驾驶和协同控制中的作用,汽车网联化可分为3个等级,如表2所示[1]。
智能汽车通过自车传感器感知、结合V2X通信感知,能够在广域范围内实现以安全和能量优化为目标的路径和车速优化、防撞避撞等功能,进一步提升道路交通的效率、降低事故发生率和整车的能耗水平。智能网联汽车集成了先进的传感器、定位和通信装置,在不同空间尺度范围内感知道路周边及广域交通环境信息,通过环境感知信息融合、评估和路径规划控制,能够通过协同控制提高自动驾驶技术的安全性、舒适性和节能性。智能汽车技术体系架构如图1所示。
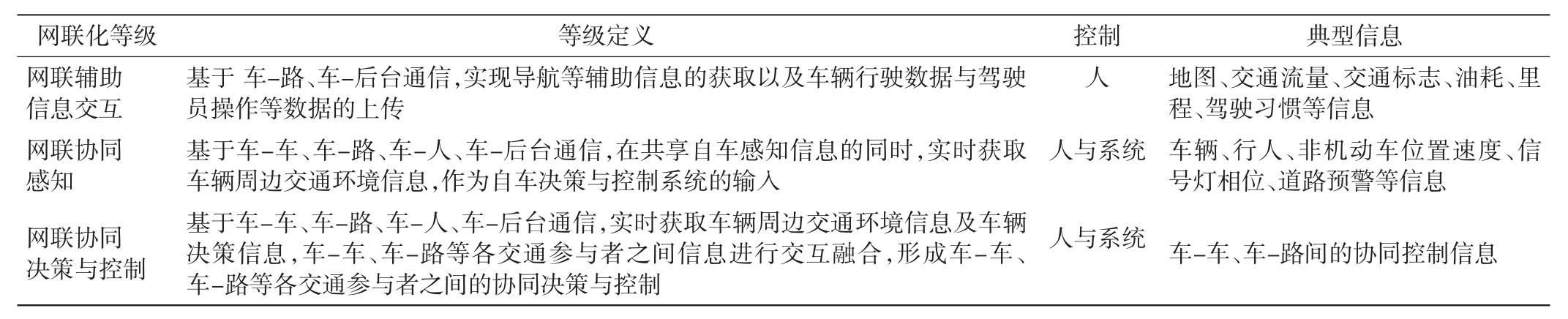
表2 网联化等级
2.2 智能汽车控制系统功能架构
智能汽车的控制系统由环境感知系统,评估、决策和控制系统以及人机交互系统组成。智能汽车控制系统的功能架构如图2所示。

图1 智能汽车技术体系架构
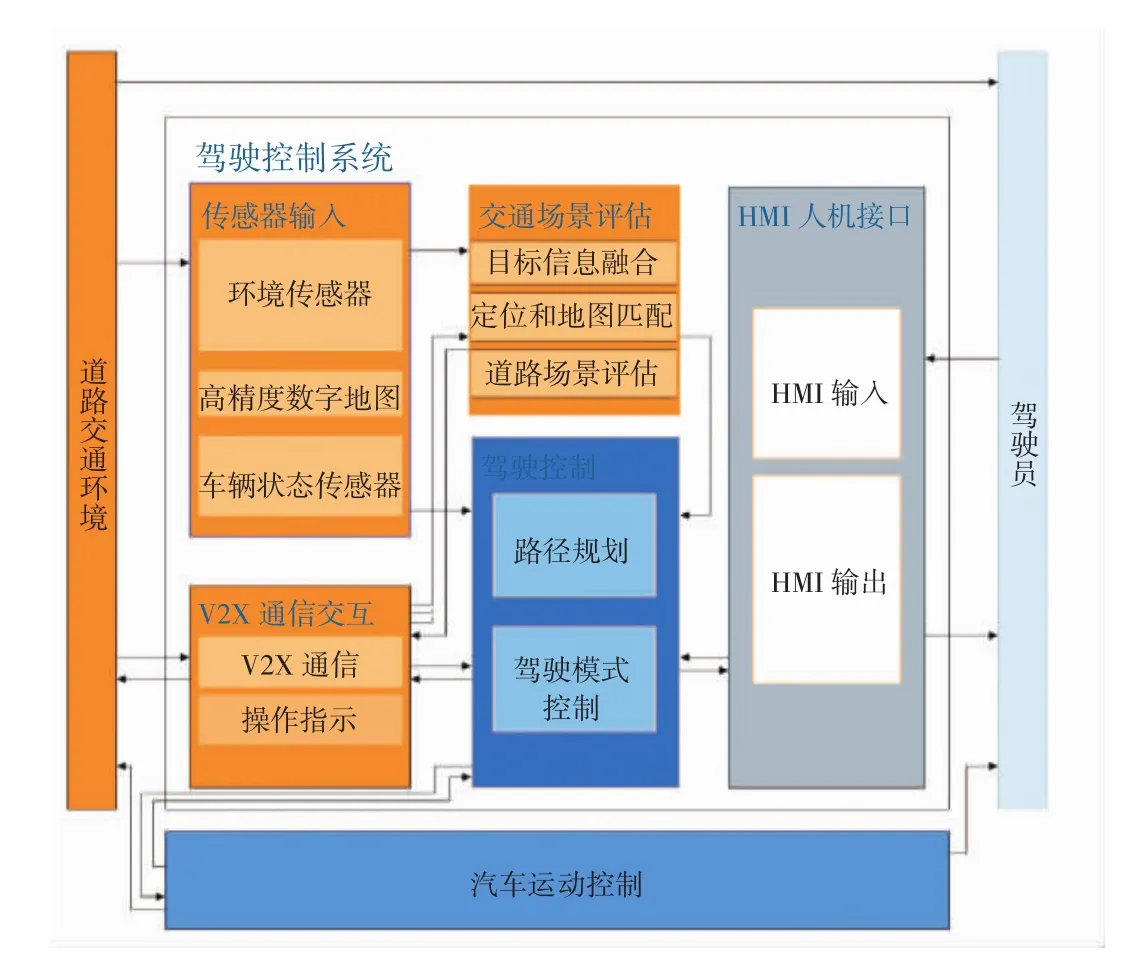
图2 智能汽车控制系统的功能架构
环境感知系统分为物理传感器系统和V2X通信传感系统2种类型。物理传感器分为环境感知传感器(包括超声波雷达、毫米波雷达、激光雷达和机器视觉传感器)、高精度数字地图以及车辆状态传感器(包括动力系统和底盘系统等状态)3类。V2X通信传感系统一方面通过V2V、V2I等通信获得道路交通状态和其他车辆及交通参与者的信息,另一方面可以将本车的相关操纵状态信息发给其他车辆和交通参与者。
评估、决策和控制系统由交通场景评估模块及路径规划和控制模块组成。交通场景评估模块的功能是将不同传感器感知的交通状况进行信息融合,进行地图定位和匹配、生成道路交通状态描述等。路径规划和控制模块的功能是根据交通场景评估的结果进行路径规划和行驶轨迹控制。在完成车辆的路径规划后,需要进行轨迹跟踪控制来实现车辆的自动驾驶功能。车辆的轨迹跟踪控制可通过控制实际车辆跟踪虚拟车辆来实现。
为便于描述轨迹控制原理,车辆的实际位姿与虚拟车辆位姿、智能汽车轨迹跟踪控制原理分别如图3和图4所示。
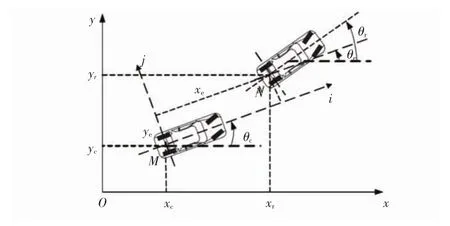
图3 车辆的实际位姿与虚拟车辆位姿
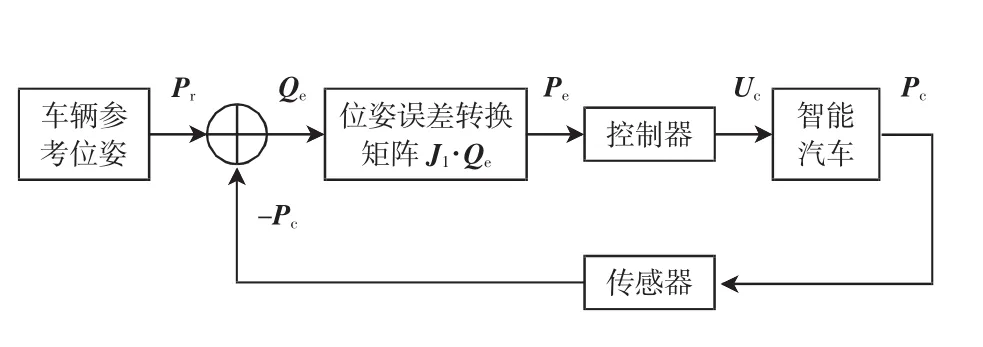
图4 智能控制原理图
图3中参考点M表示的位置是车辆的实际位姿,(xc,yc)为参考点M在世界坐标系下的坐标,θc为局部坐标系(M,i,j)与世界坐标系(O,x,y)的夹角。参考点N表示虚拟车辆位姿。图4中,车辆的参考位姿Pr=(xr,yr,θr)T为车辆的参考位姿,Pc=(xc,yc,θc)T为车辆的实际位姿,Qe=Pr-Pc。车辆的运动误差Pe=J1·Qe,运动误差输入控制器后,控制器采用相应的控制算法输出控制量 Uc=(vc,ωc)T,Uc通过电控执行机构控制智能车辆的状态,使其状态逼近参考位姿。控制器采用Backstepping算法,其算法描述如下[2-6]:


式中:a1、ax、ay、a0均为正实数;f(kωc)为双曲正切函数。ax影响x方向误差,ay影响y方向误差,a0影响车辆方向角误差。
人机交互系统具有2个方面的功能:智能驾驶系统检测到危险状态时,对驾驶员进行振动、声音或语音报警,提醒驾驶员危险状况;驾驶员通过操作控制面板、旋钮激活、关闭智能驾驶系统或设定智能驾驶系统的参数来进一步设置智能驾驶系统。
3 智能网联汽车的测试方法
3.1 智能网联汽车的测试需求
智能汽车的开发主要涵盖从概念开发、系统实现到测试评价的整个流程。智能网联汽车的测试需求和流程如图5所示。
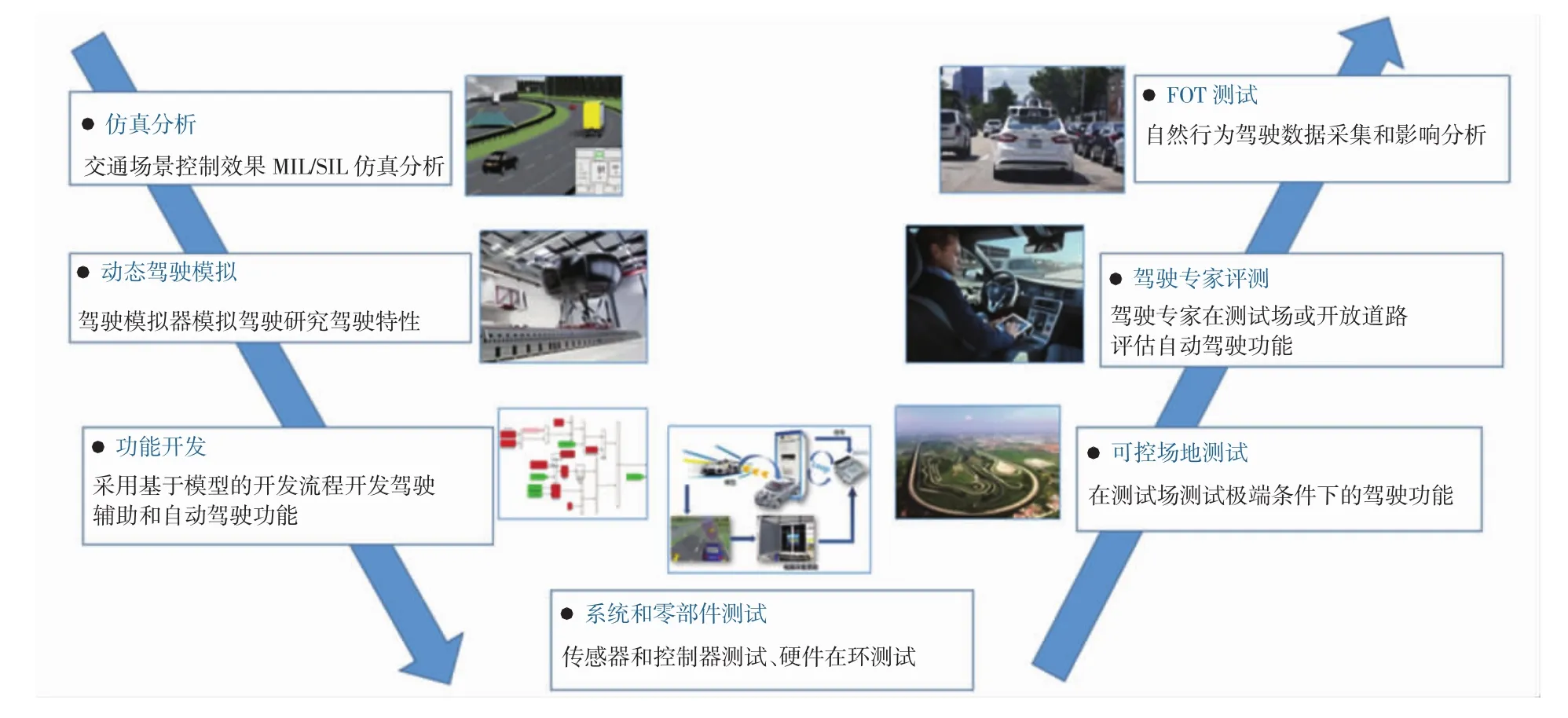
图5 智能网联汽车的测试需求和流程
在概念开发阶段,需要采用交通流模拟仿真工具如Prescan、Carmaker等软件进行控制系统的模型在环(model in the loop,MIL)和软件在环(software in the loop,SIL)仿真。此阶段,还需要采用驾驶模拟器进行驾驶行为的分析,用于设定自动驾驶系统及其人机交互系统(HMI)的参数。功能开发阶段采用基于模型开发(model based development,MBD)方法和流程进行ADAS和自动驾驶控制功能的开发,实现相关的驾驶辅助和自动驾驶功能。零部件测试阶段主要对智能汽车传感器、执行机构及硬件在环(hardware in the loop,HIL)进行测试。
智能汽车实车测试分为3个层级。首先是在可控场地的测试,通常在汽车试验场等设施内进行,排除社会车辆的随机影响。可控场地内的测试主要进行规范场景下的整车智能驾驶功能测试及极端驾驶条件下的功能测试。开放道路和可控场地的专家评测,由专业的智能驾驶测试评价人员在开放道路和可控场地内进行智能驾驶的功能测试和性能评价,主要从专业、量化的角度对零部件、系统及驾驶行为进行评测。道路运行测试(field operational tests,FOT)的主要目的是评估实际道路上的智能驾驶对零部件、系统以及驾驶行为的影响[7]。
3.2 智能网联汽车相关标准现状
国际标准化组织(ISO)于1993年成立了TC204技术委员会,主要职责是组织制定交通信息和控制系统状况的总体目标和结构的相关标准及与ISO整体计划的协调。TC204技术委员会下设16个工作组,分别涉及智能网联汽车相关的体系架构、自动队列行驶控制、交通信息管理和控制系统、定位和导航、车路协同预警和控制、专用短程通信DSRC和广域通信等技术领域。ISO/TC204/WG14工作组是国际标准化组织智能运输系统分技术委员会(IS0/TC204)下设的一个标准化工作组,主要负责车辆/道路警示及控制系统方面的标准化制定工作。TC204工作组目前已经正式发布了13个标准,10个标准正在制定过程中,其中11个标准与自动驾驶相关,4个标准与车路协同驾驶相关。标准的制定反映了当今智能网联汽车技术的发展趋势和方向。智能网联汽车相关标准信息如图6所示[8]。
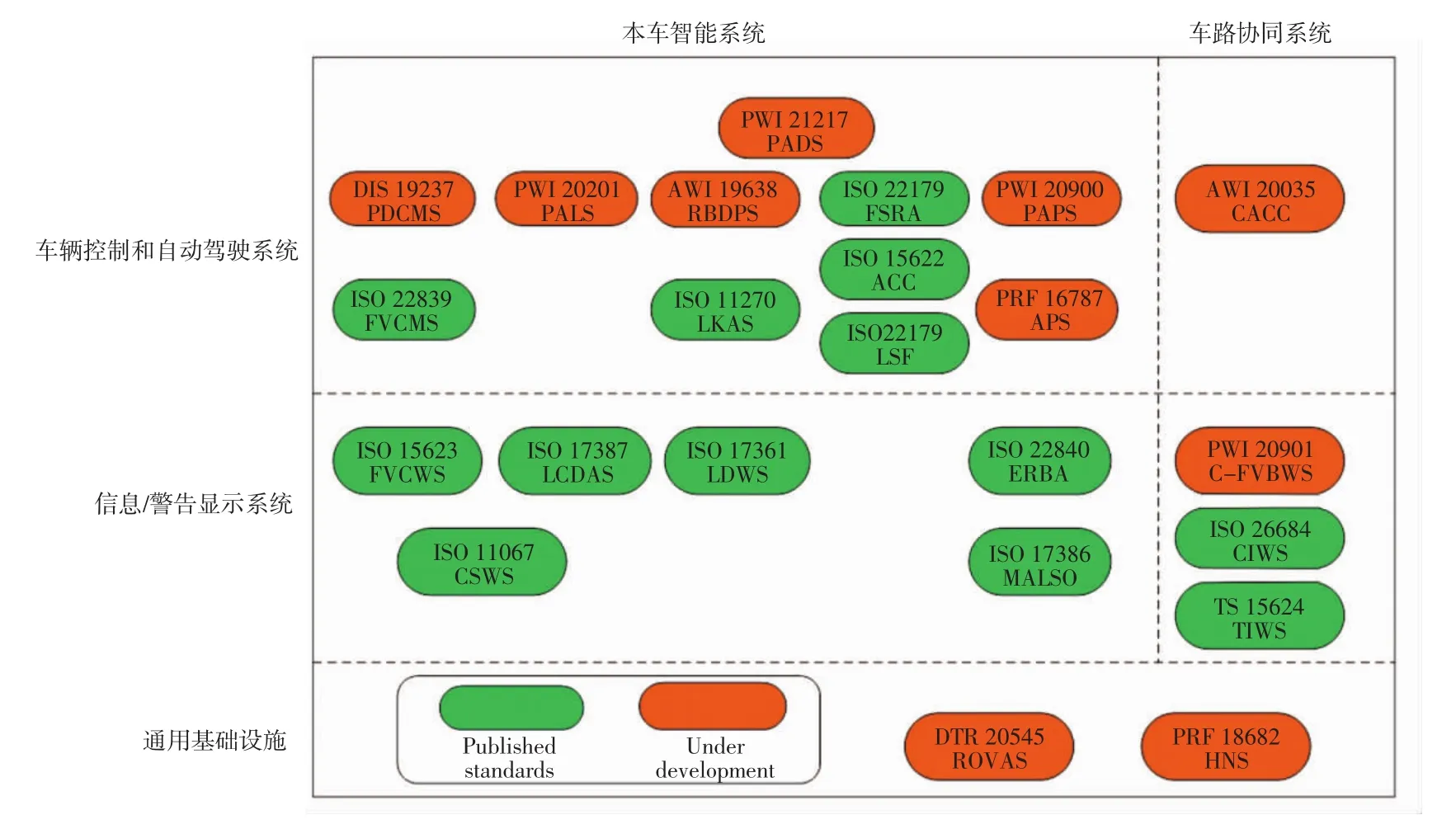
图6 智能网联汽车ISO标准现状
由图6知,从通信技术应用的角度看,可以分为本车智能系统和车路协同系统。从本车智能化的角度看,可分为信息/警告显示系统以及车辆控制和自动驾驶系统。信息警告系统作为汽车智能化的初级阶段,现已发展成熟,目前已有6项标准制定完成。车辆控制和自动驾驶系统相关技术仍在不断发展进步中,因此有5项标准已制定完成,6项标准仍在制定过程中。另外,还有2项智能汽车相关的通用基础设施标准也在制定过程中。车路协同系统作为新技术在智能汽车上应用的相应标准已开始制定或完成制定,目前有2项车路协同系统标准已经发布,另有2项标准仍在制定过程中。
4 结语
随着汽车技术和电子技术的不断进步以及对汽车安全性、舒适性和交通效率提升要求的不断提高,智能驾驶已经成为不可逆转的趋势。智能网联汽车运行涉及环境传感、规划决策、人机交互和复杂交通等方面,自动驾驶相关系统的开发和测试面临巨大的挑战。与此同时,ADAS系统和自动驾驶系统的测试理论和实践在不断发展,相关的方法研究和项目持续开展,相关标准规范也在不断完善中。
参考文献:
[1]节能与新能源汽车技术路线图战略咨询委员会,中国汽车工程学会.节能与新能源汽车技术路线图[M].北京:机械工业出版社,2017.
[2]游峰.智能车辆自动换道与自动超车控制方法的研究[D].长春:吉林大学交通学院,2005.
[3]祖莉.户外小型智能移动机器人运动轨迹跟踪控制[J].南京理工大学学报,2003,27(1):56-60.
[4]FRERRO R.Control of a nonholorxrmic mobile robot:backstepping kinematics into dynamics[C]//WATADA J,YABUUCHI Y.IEEE Proceedings of 34th Conference on Decision and Control.Piscataway:IEEE Computer Society Press,1995:3805-3810.
[5]LI J H.Design of an adaptive nonlinear controller for depth control of an autonomous underwater vehicle[J].Ocean Engineering,2005,17(32):2165-2181.
[6]CHEN C.Backstepping control design and its application to vehicle lateral control in automated highway systems[D].Los Angeles:University of California,1996.
[7]李霖,朱西产.智能汽车安全技术评价方法研究[C]//中国汽车工程学会.汽车工程学会年会论文集.北京:北京理工大学出版社,2015:488-490.
[8]Society of Automotive Engineers of Japan,Inc.ITS standardization activities of ISO/TC204 2016[EB/OL].(2016-09-10)[2018-02-09].http://www.iso.org/iso/iso_technical_committee%3Fcommid%3D54706.
猜你喜欢
中国交通信息化(2022年9期)2022-11-19
中国惯性技术学报(2020年4期)2020-12-14
学生天地(2020年5期)2020-08-25
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
电子制作(2019年11期)2019-07-04
电子技术与软件工程(2019年6期)2019-04-26
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
科技与创新(2018年12期)2018-06-22
小天使·一年级语数英综合(2017年3期)2017-04-25