永磁同步电机矢量控制实验系统调试及故障分析
2018-04-24 03:13徐婷,戴怡
天津职业技术师范大学学报 2018年1期
徐 婷,戴 怡
(天津职业技术师范大学机械工程学院,天津 300222)
矢量控制是德国SIEMENS和日本FANUC等数控系统的核心技术,然而长期以来SIEMENS、FANUC等供货商提供的技术资料对他们的矢量控制技术披露很少,更没有其相应的技术实现方案、调试案例及参数细节。国内诸多教材、技术手册以及一些做得比较好的侧重数控技术的院校也几乎没有这方面实验内容,因而造成SIEMENS、FANUC等数控系统的技术空白和神秘化,这些数控系统的安装调试和故障分析大多停留在表面层次,或者是凭经验进行。因此,开展矢量控制实验进而掌握相关技术,是掌握国外高档数控技术的前提和基础[1-3]。本文搭建一套永磁同步电机矢量控制系统实验台进行矢量控制系统实验,对实验中出现的软件启动和程序测试异常及闭环实验中遇到的电机堵转等故障进行研究分析。
1 永磁同步电机矢量控制实验系统组成
永磁同步电机矢量控制实验平台如图1所示。该平台主要包括永磁同步电机、功率驱动器、DSP控 制板(TMS320F2812)和仿真器(TDS510)等。TMS320F2812是整个控制系统的核心,应用代码调试软件CCS2.0进行控制程序的调试,通过仿真器下载到DSP上,经过空间矢量调制运算,输出PWM脉冲控制IPM模块中桥臂开关的状态,以获得施加于电机的三相电压,同时霍尔传感器检测到的电流、光电编码器检测到的电机转速及转子位置通过仿真器反馈到上位机,CCS软件实时监测相关数据及波形。
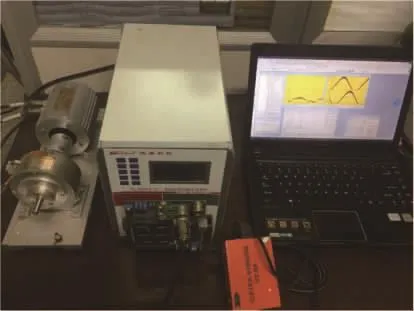
图1 永磁同步电机矢量控制实验平台
2 矢量控制实验及故障分析
2.1 CCS连接和控制程序测试异常及电机错误辨识
DSP控制板类型和仿真器类型设置后,启动CCS2.0,若短时间内没有进入操作页面,且DSP板上的“LED4”指示灯不闪烁,则点按DSP板上的复位键,直到该指示灯闪烁为止。如果仍然异常,须检查DSP转接板上的JP1开关是否拨向右边,以连接永磁同步电机的光电编码器信号线,同时确保DSP板上8位编码开关中的第2位是拨下的。排除以上故障,重新插拔仿真器,检查计算机设备管理器中是否已经成功安装了仿真器驱动。
在DSP控制板启动CCS软件后,初次编译控制程序时往往出现“illegal relocation type found in section debug_info”错误,错误的原因是一个库文件“F2812 Xdrv_ml.L28”没有编译好。这时需检查工作环境文件及控制程序是否存到计算机系统E盘目录下,因为TI公司的CCS集成软件在最初出厂时是以E盘为最初路径的,并且具有记忆功能。当电机的辨识出现错误时,可以在不连接仿真器与电脑的条件下,进行脱机实验,直接控制功率器面板进行电机的正反转实验,以检查电机有无故障。
2.2 开环启动实验
矢量控制的核心是坐标变换,CLARK变换将三相交流变换为两相交流,PARK变换将两相交流变换为两相直流,相当于用控制直流电机的方法去控制交流电机[4-6]。开环启动实验框图如图2所示。

图2 开环启动实验框图
给定2个直流电压初始值与某速度下的转子角度值,经过PARK逆变换得到空间电压矢量计算值,控制对应6个基本空间电压矢量作用时间,输出6个PWM脉冲,用以驱动逆变器—同步电机。在反馈环节,电机三相电流经过CLARK和PARK变换得到上述逆变换所需电压值。设计此开环实验是为切断该反馈环节,以观察PARK变换后的转矩电流值Ds以及电机两相采样电流Ia和Ib的波形。
2.2.1 电机转动不稳定或不转
当功率电路及电机等部件连线正确时,电机启动且在给定转速下运行。当电机转速不稳或者控制器上显示速度不正确时,首先检查地线是否接好,JP1开关是否拨向右侧;如果电机不转,应检查DSP板上的LED2灯是否熄灭。如果该灯熄灭,一般是产生了功率保护中断,这是因为电机启动时给定转速过大或者电流Ia及Ib的偏移量过调,会输出一个有效的中断电平,使系统产生功率中断以确保IPM模块不被烧坏。
在实验过程中,若使电机停止运转,先给定一个较小转速,在电机稳定运行后,再使电机停转,最大程度地保护电机。实验结束时,不应直接关闭控制电源,应先退出软件的实时运行模式,使CCS软件退出程序,然后再关闭功率模块主电源。
2.2.2 Ia以及Ib的波形异常
Ia及Ib是电机定子绕组上A、B两相的电流,由于每台驱动器被检测的电流均有差别,因此需调节Ia和Ib的波形使它们接近正弦波,再将这个波形下合适的电流偏移量写到程序中,重新编译下载和运行,以确保每台驱动器与控制程序之间的配合,这就要求实时波形的可见性和准确性,Ia和Ib的故障测试波形如图3所示。若根据波形无法准确识别Ia、Ib幅值以及相位差,这可能是由于电流检测电路中采样滤波环节的异常所致。为此,基于Multisim软件建立A相电流检测电路仿真模型,如图4所示。
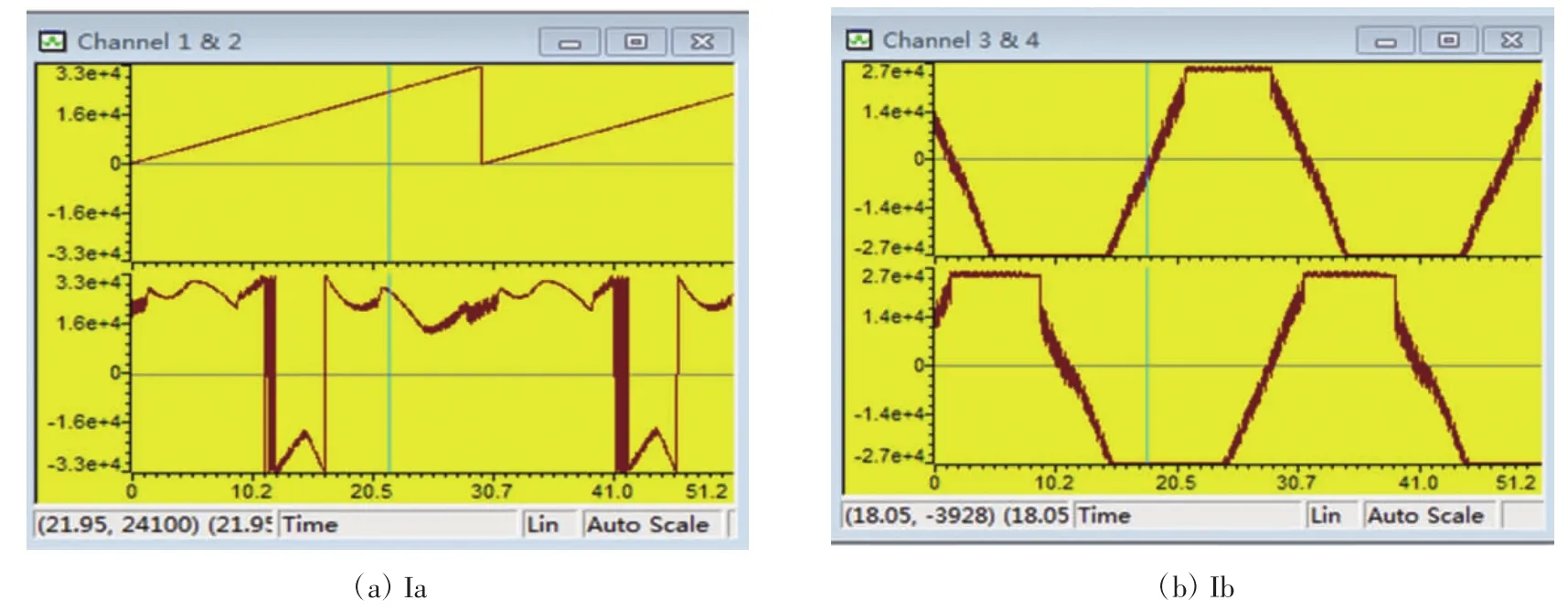
图3 Ia和Ib故障测试波形
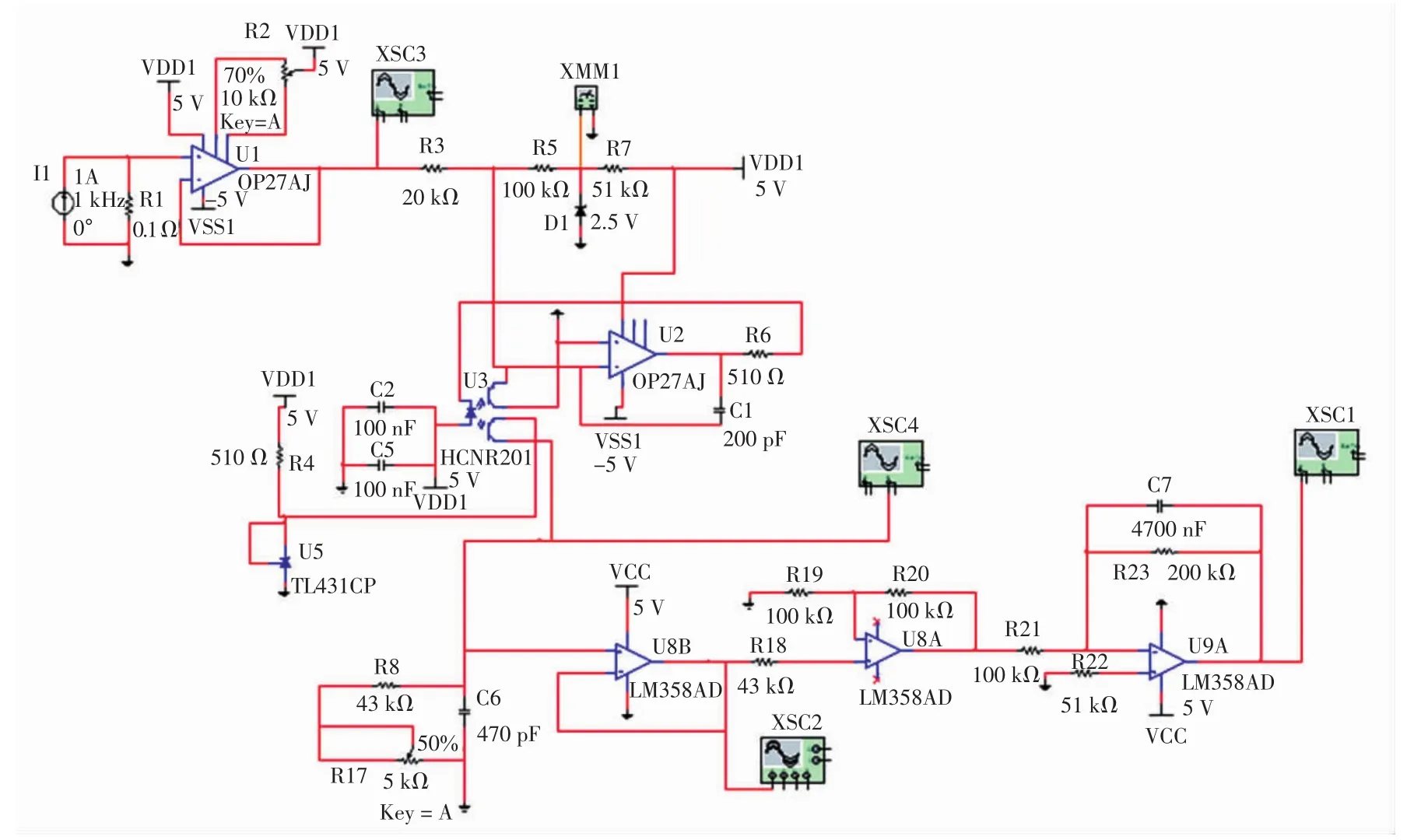
图4 A相电流检测电路仿真模型
由图4仿真模型知,此检测调理电路由5个功率放大器以及周围的隔离保护电路组成,左端电压源信号I1模拟电机A相输入信号,经过多重滤波及放大后输出。分别调节电位器R2及R17,电位器R17直接影响正弦波信号的输出。同理,将B相电路仿真,同样调节电位器,以获得准确的正弦波。将调节后的功率伺服重新接入矢量控制系统,通过上位机的CCS软件重新检测Ia及Ib的波形,得到两相正负半波对称的正弦波,此时PARK变换后的励磁电流值相对平坦,如图5所示。此时两相电流偏置比例系数分别为-4 800及-5500。通过测量,斜坡函数周期为9.95ms,Ia电路第一个峰值时间为2.2 ms,Ib第一个峰值时间为5.25 ms;通过计算求得结果为2π/3。从测量结果可以看出Ia超前Ib 120°,即调整正确。
2.3 电流速度双闭环系统功能测试
电流速度双闭环实验框图如图6所示。
2.3.1 电机空载转速不稳
电机此时的速度由给定值控制,改变速度参考值或是转向,电机速度跟随给定值迅速变化,若电机转动不稳,即噪声很大或者液晶板上显示的转速不能稳定在某一区间,采用脱机实验排除电机自身故障后,一般是因为在开环启动实验中,Ia及Ib的电流偏移量未能准确调节所致,因为每台驱动器的电流检测模块均有偏差,适用于某一台的电流偏移量不一定适用于另外一台,只有准确调节好这2个电流的偏移量,实验结果才能更准确。另外,在Ia及Ib调节全部正确的情况下,如果电机仍然出现不稳的情况,需考虑转子相位是否经过了初始化。相位初始化是在电机启动之前,给电机一个-90°的直流转矩,将转子d轴吸引到对准A轴,此时观察窗口中变量VqAngle为0.75,即相位为 270°(相当于-90°),说明电机此时处于-90°的固定转矩作用下,从而找到相位的初始位置。
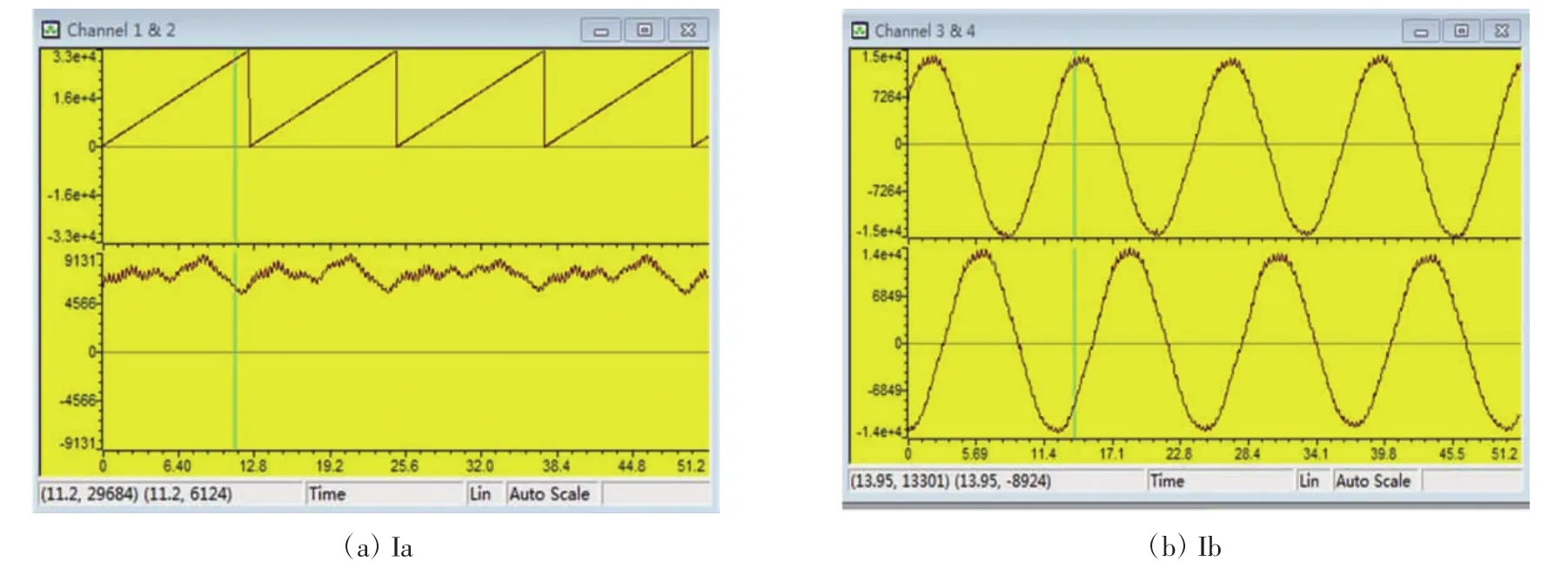
图5 Ia及Ib检测波形
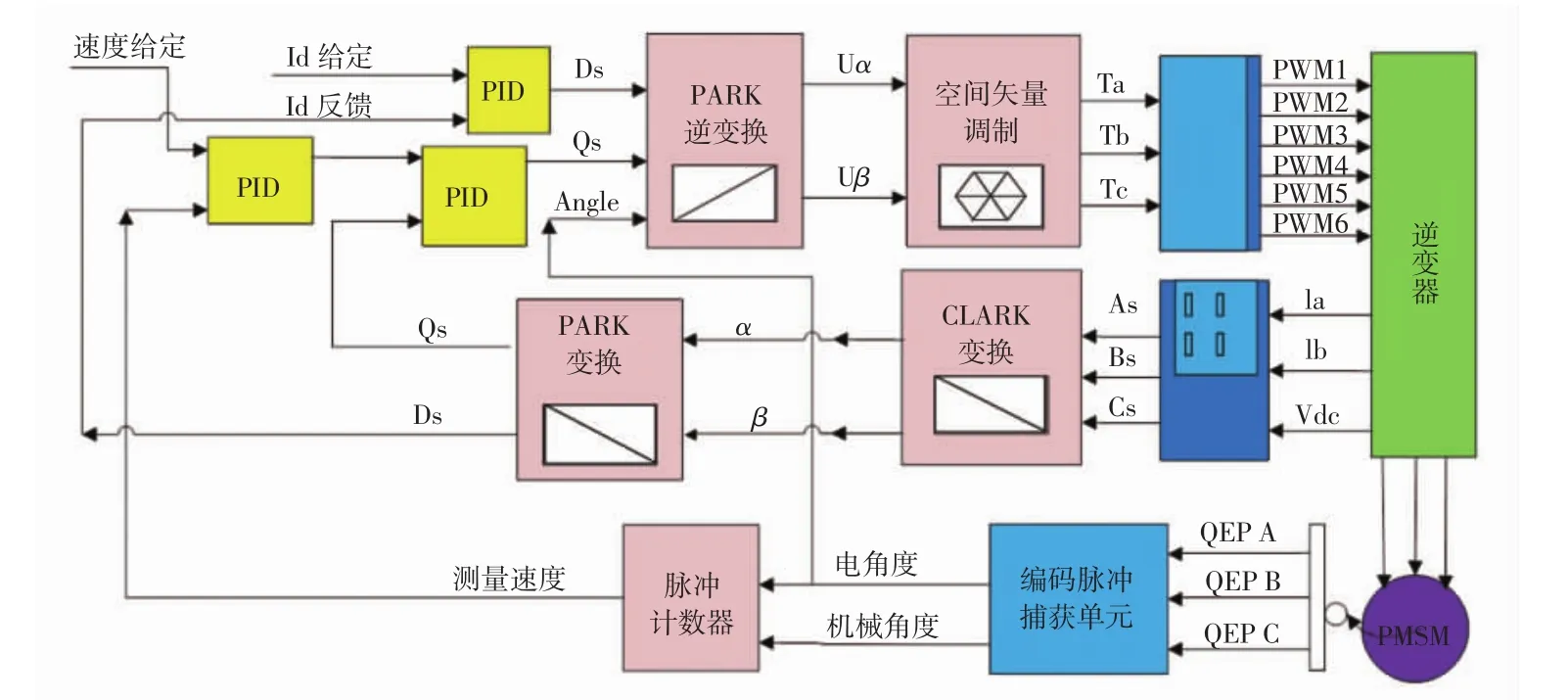
图6 电流速度双闭环实验框图
若电机负载实验正常,但空载功率波动很大,则因发热导致[7],电机空载时发热会造成电阻的不稳定,从而影响功率。此时应结束实验,待电机冷却后再继续。
2.3.2 电机空载启动正常,加负载后转动不稳或堵转
通过控制器给电机加上合适的负载后,可以看到速度下降,但经过PI调节后,速度又达到了设定值。这说明速度闭环是成功的。电机加负载后,出现转动不稳或是堵转情况,按照安全提示关闭流程结束实验,在不接任何线路及功率设备的情况下,检查电机连轴器联接是否稳固。排除硬件因素后,出现上述情况则是负载惯量过大所致,应在几十mA负载基础上慢慢加大。
3 结语
本文通过永磁同步电机矢量控制系统实验,分析了实验过程中库文件F2812Xdrv_ml.L28路径错误,定子电流Ia和Ib偏移量失调严重,转子相位初始化误差较大和系统调试技术要点等典型故障案例,这些案例极大地丰富了矢量控制系统技术的细节与内涵,对学习掌握国外先进数控技术有一定帮助。
参考文献:
[1]周漾.数控机床交流伺服系统矢量控制的研究[D].哈尔滨:哈尔滨工业大学,2007.
[2]阮毅,陈伯时.电力拖动自动控制系统—运动控制系统[M].4版.北京:机械工业出版社,2015.
[3]周海森.基于TMS320F2812的永磁同步电机矢量控制系统设计与实现[D].西安:长安大学,2015.
[4]韩安太,刘峙飞,黄海.DSP控制器原理及其在运动控制系统中的应用[M].北京:清华大学出版社,2003.
[5]徐斌.永磁同步电机矢量控制系统研究[D].南京:南京理工大学,2014.
[6]张军凯,韩峻峰.SVPWM原理及逆变技术的仿真研究[J].计算技术与自动化,2016,35(1):41-46.
[7]倪霞林,郑祥盘.基于DSP&IPM的矢量控制系统优化控制[J].电力电子技术,2007,41(12):85-87.
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
地理空间信息(2022年3期)2022-04-01
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
中国计算机报(2020年9期)2020-03-25
计算机辅助工程(2018年4期)2018-10-09
铁路计算机应用(2018年4期)2018-05-03
价值工程(2018年13期)2018-05-03
制造技术与机床(2017年7期)2018-01-19