基于滑模解耦的EPS用PMSM鲁棒预测电流控制
2018-04-27 05:06郭艳玲许李尚奚文龙刘方悦
微特电机 2018年2期
郭艳玲,许李尚,奚文龙,刘方悦
(东北林业大学,哈尔滨 150040)
0 引 言
电动助力转向(以下简称EPS)系统作为现在已经被广泛应用在汽车上的最主要的转向系统之一,备受关注。其中永磁同步电机凭借其功率密度高、体积小、转动惯量小、齿槽扭矩小和可靠性高的优点,成为国内外EPS研究的热门课题之一[1-2]。
目前永磁同步电动机(以下简称PMSM)的控制有矢量控制、直接转矩控制等。EPS系统一般只需要搭建电机的控制电流环,因而对于EPS系统用PMSM,工程实际中最常使用的电流控制策略是基于矢量控制的同步坐标系下的PI控制。然而,传统PI控制很难满足高性能EPS系统对目标电流高响应与小超调量的要求,且矢量控制下的PI控制只实现了d,q轴的静态解耦,无法消除动态过程中的交叉耦合,导致电流的动态跟踪性能进一步的降低。
预测控制是基于无差拍控制原理下的一种电流控制算法,是当下PMSM电流控制中十分有效的控制策略。但基本的电流预测控制过于依赖精确的电机模型,且稳定性还受控制延时的影响,因此在使用时需要对其进行改进。针对减缓延时的影响,文献[3-4]讨论了模型中的延时对系统稳定性的影响,并提出消除延时的方法。关于参数摄动的问题,文献[5-7]提出采用鲁棒电流预测来消除电感参数对模型稳定性的影响,同时在鲁棒预测的基础上,增加扰动观测器提高系统的鲁棒性。但上述方法都是在理想解耦的前提下推导出来的,使用的是传统解耦方式,忽略了参数对动态解耦的影响。而自适应解耦和智能解耦[8-11]能够有效地减弱动态解耦对电机参数的依赖性。
本文在同步坐标系下,根据PMSM的数学模型和无差拍控制的思想,先假设通过反馈解耦使系统处于理想解耦状态,而后建立对系统延时和电机参数有强鲁棒性的鲁棒预测电流的无差拍控制算法。在保证原有系统的电流跟踪精度和稳态性能不变的前提下,分析这种动态解耦算法下的系统控制精度随电机参数摄动的变化,提出了一种自适应滑模电流解耦算法。最终建立了一个由无差拍控制器、电流观测器和滑模解耦补偿器构成的自适应滑模解耦的鲁棒预测电流的无差拍控制算法。而后对这种控制器的电流跟随性能和跟踪精度进行仿真分析,验证了这种控制算法能够显著地提高电流的跟踪速度和控制精度的结论。
1 PMSM及其数学模型
1.1 EPS用PMSM简介及其基本模型
EPS用PMSM一般是额定电压为12 V或24 V的小型三相电机。在转子永磁体的安装方面,由于EPS用PMSM不需要工作在超高速状态下,所以通常采用表贴式永磁体结构,同时使用塑料粘接进一步固定,防止其在转动中发生磁极移位或脱落。表贴式PMSM拥有直交轴(d,q轴)电感近似相等的特点,这一特点能够简化电机的数学模型,降低其控制难度。
忽略磁路饱和、磁滞和涡流影响,同时假设永磁体在气隙中的磁通密度按正弦规律分布,则在同步d-q轴坐标系下,表贴式PMSM的电压方程:
(1)
式中:L为d轴线圈或q轴线圈的总电感;ψf为永磁体产生的磁链;vd和vq分别是d轴线圈和q轴线圈的端电压;R为线圈内阻;id和iq分别是流过d轴线圈和q轴线圈的电流;p为微分算子;ωr为电气角速度。
根据式(1)可知,d轴和q轴电流分别在q轴和d轴方向产生了耦合反电动势。假设采用反馈解耦,则由式(1)得:
(2)

(3)
式中:I=[id,iq]T;U=[vd0,vq0]T。
求解式(3)得:
(4)
为了获得电机电流的离散递推方程,假设电流采样周期和控制周期时间均为T,则令t0=kT,同时假定系统输入电压在此期间恒定,则式(4)可离散化:
I(k+1)=aI(k)+bU(k)
(5)

1.2 考虑电流采样和逆变器延迟的电机模型
图1为电流采样和控制时序图。由图1可知,由于计算延时的原因,使(k-1)T时刻的采样电流,作为kT时刻PWM占空比的计算依据,出现了第一个延时。同时由于逆变器零阶保持的特性,使系统引入了第二个延时。系统的总延时为2倍的电流采样周期,也就是2T[6]。

图1 电流采样和控制时序
考虑电流采样延时td=T,令I′(k)≡I(t-T),t0=(k-1)T,t=(k+1)T,则代入式(4)并离散化后得:
I′(k+1)=aI′(k)+bU(k-1)
(6)
2 电流预测控制算法的设计和分析
2.1 无差拍控制与基本电流预测算法
无差拍控制是在转子参考坐标系下的一种高性能的电流控制器,能在最少采样周期内使电流误差减小到零,是基于离散的PMSM数学模型建立的。根据式(6)可知,系统存在两倍采样周期延时,根据无差拍控制的特点令目标电流I*(k)=I′(k+2),可得出无差拍控制的输入表达式:
(7)


把式(6)向后延迟一个电流采样周期,预测PWM更新点处的电流值:
(8)

将式(7)的实际电流替换成式(8)的预测电流,则得:
(9)

(10)
按照式(5)和式(10)所搭建的控制框图如图2所示。
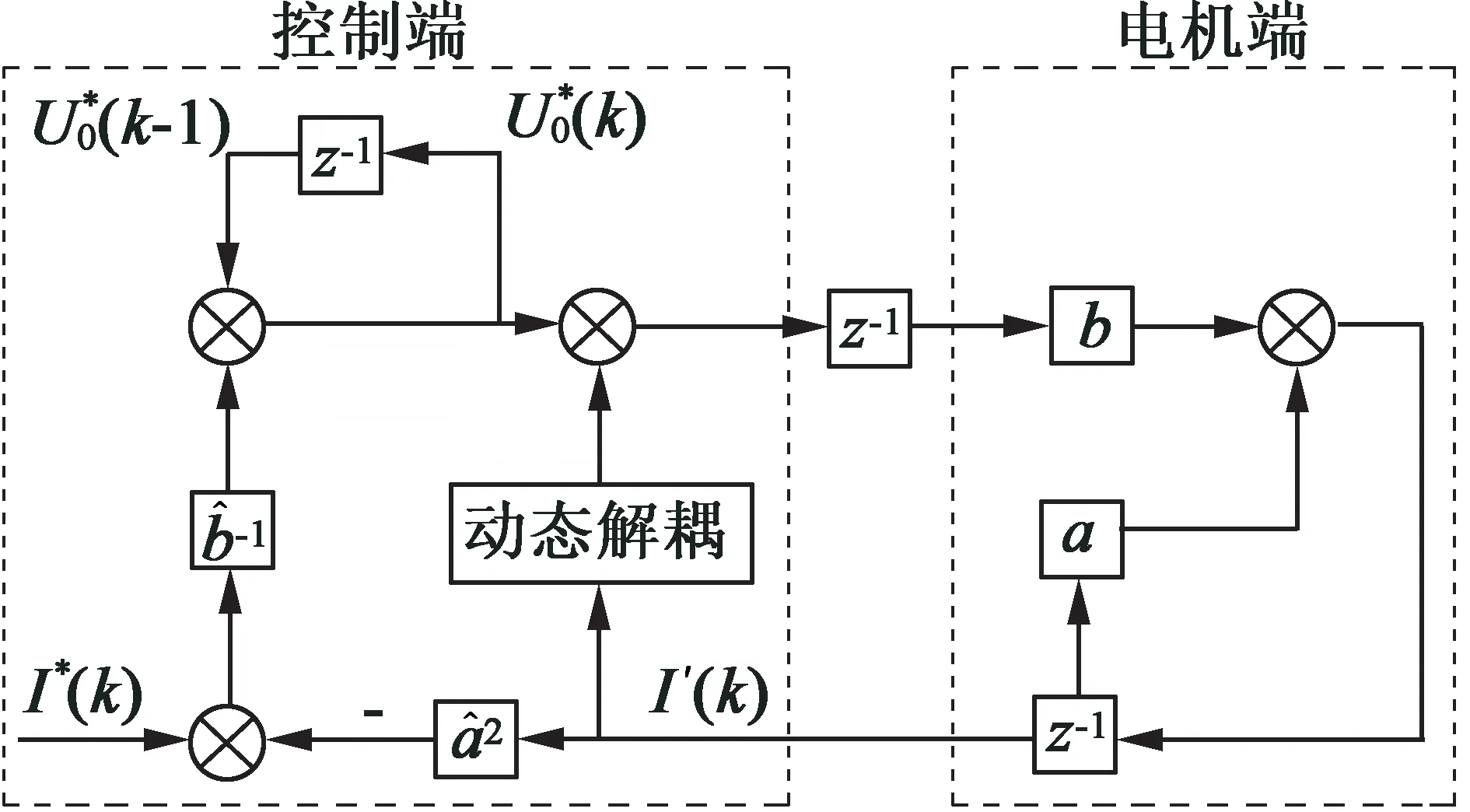
图2 基于电流预测的无差拍控制结构框图
2.2 鲁棒电流预测下的无差拍控制
在电流预测中增加全阶状态观测器是一种合理的选择。按照全阶状态观测器的基本模型对式(8)进行修改,得到:
(11)
式中:Ke为状态观测增益。
(12)

按照式(5)和式(12)所搭建的控制框图如图3所示。
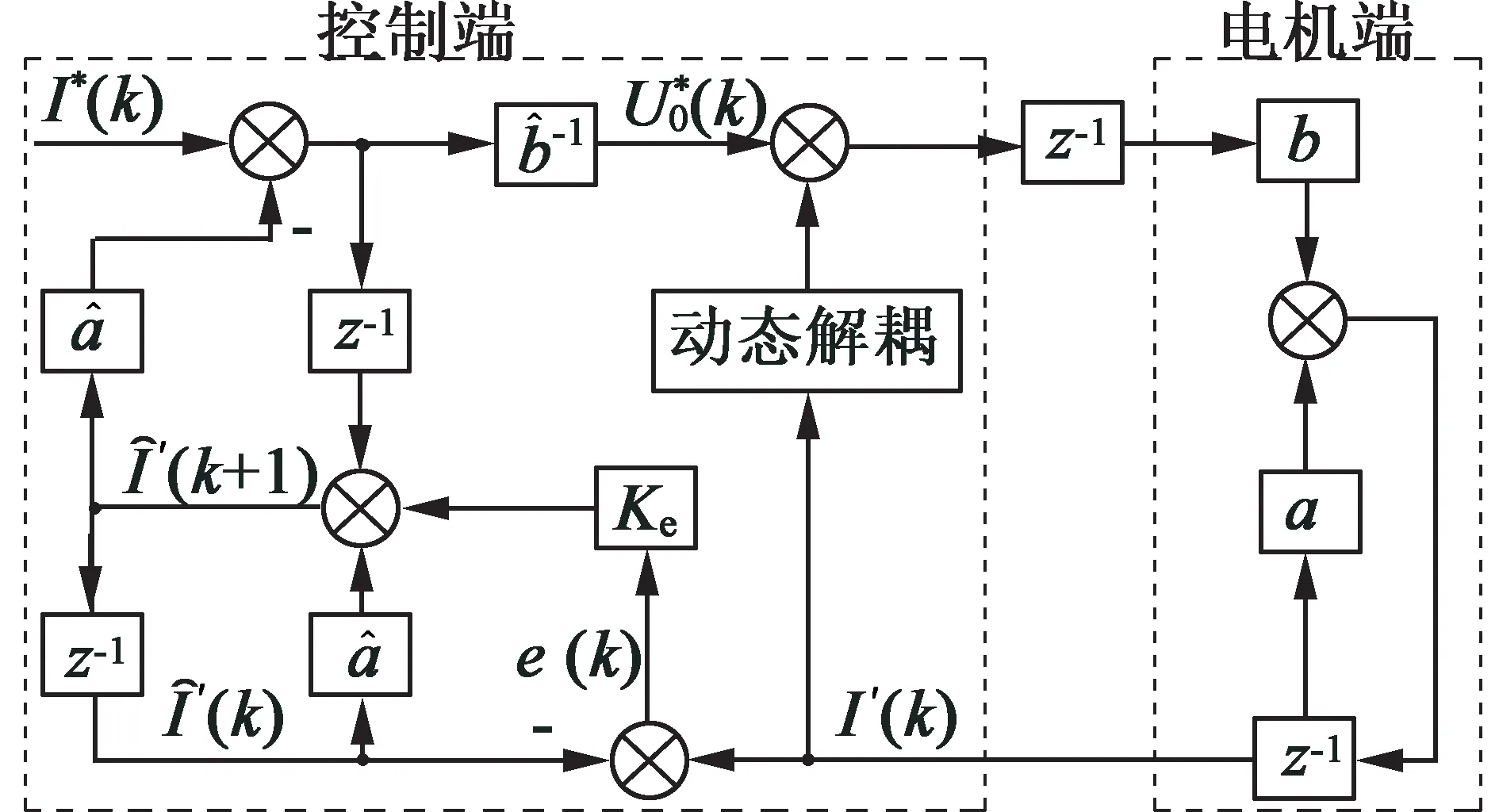
图3 基于鲁棒电流预测的无差拍控制结构框图
在不考虑动态解耦部分的情况下,根据图3,可得到系统的开环传递函数:
(13)
(14)
3 自适应离散滑模电流解耦算法的设计及分析
3.1 反馈解耦算法
图3的基于鲁棒预测电流的无差拍控制算法是在不考虑动态解耦的前提下进行推导的,所以不论是否进行动态解耦,系统在上文所讨论的参数范围内都将保持稳定。但不考虑动态解耦,将导致目标电流的动态跟随效果变差,随之导致EPS系统的助力跟踪性降低,这是高性能EPS系统所无法接受的。所以在基本电流控制算法上增加解耦算法就成为了必然。
PMSM常用的简单解耦方法有前馈解耦、反馈解耦,本文选用反馈解耦作为系统的基本的解耦算法。由式(2)可知,反馈解耦的输出公式:
(15)

对式(15)进行离散化后,与式(12)相结合,同时考虑到采样电流的滞后,使用预测电流替代滞后电流,得到系统的最终输出:
(16)
按照式(16)建立反馈解耦的控制框图如图4所示。

图4 反馈解耦的结构框图
3.2 自适应离散滑模电流解耦算法的建立
反馈解耦与基本的电流预测下的无差拍控制一样存在对模型过度依赖的问题,如果不能有效地解决这个问题,解耦效果将会减弱。考虑到解耦部分受系统参数摄动、外部干扰的影响等因素,在式(1)中增加两个动态解耦干扰项:
(17)
式中:ΔLq,ΔLd,Δψf分别是Lq,Ld和ψf的变动量;εd和εq为动态解耦时的各种外部扰动和未建模部分的等效。
(18)
本文采用滑模变结构控制的思想来实现这部分控制率[12]。由于不需要通过滑模控制实现整个控制率,所以需要对通用滑模面进行改造。改造后的d轴电流的滑模面[10]:
(19)
由于鲁棒预测电流的无差拍控制是建立在离散系统模型之上的,解耦补偿部分的滑模控制模型就需要由连续系统模型转变为离散系统模型,也就是把连续系统模型的滑动模态变成离散系统模型的准滑动模态。对式(19)进行离散化得:
(20)
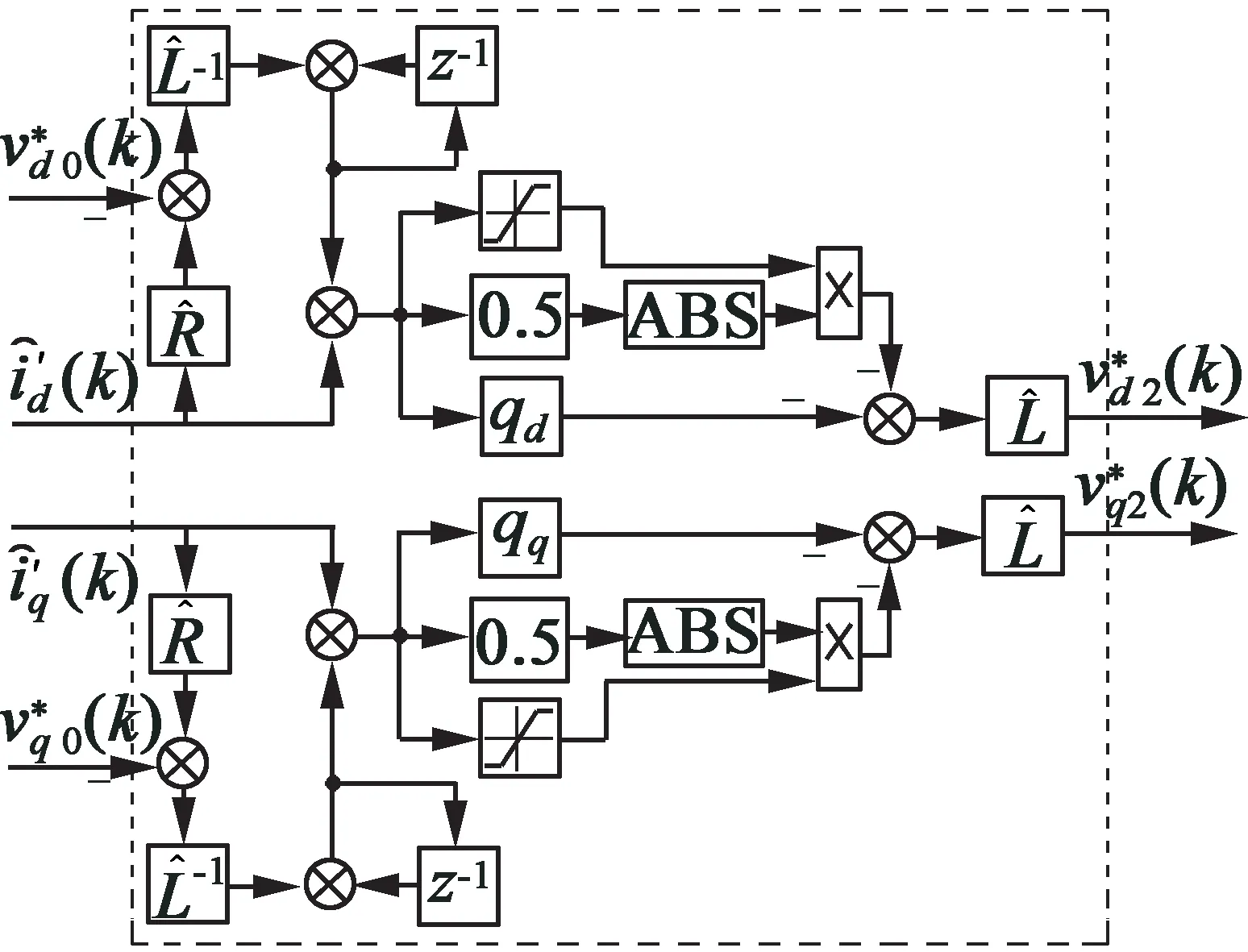
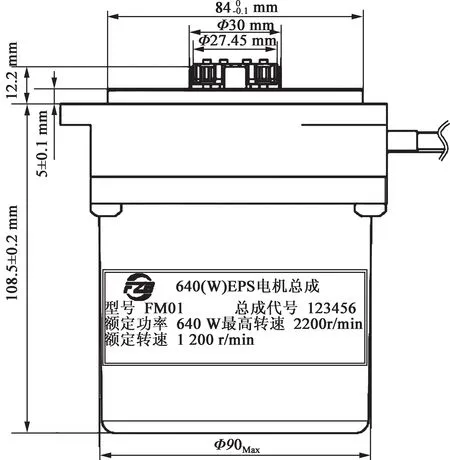
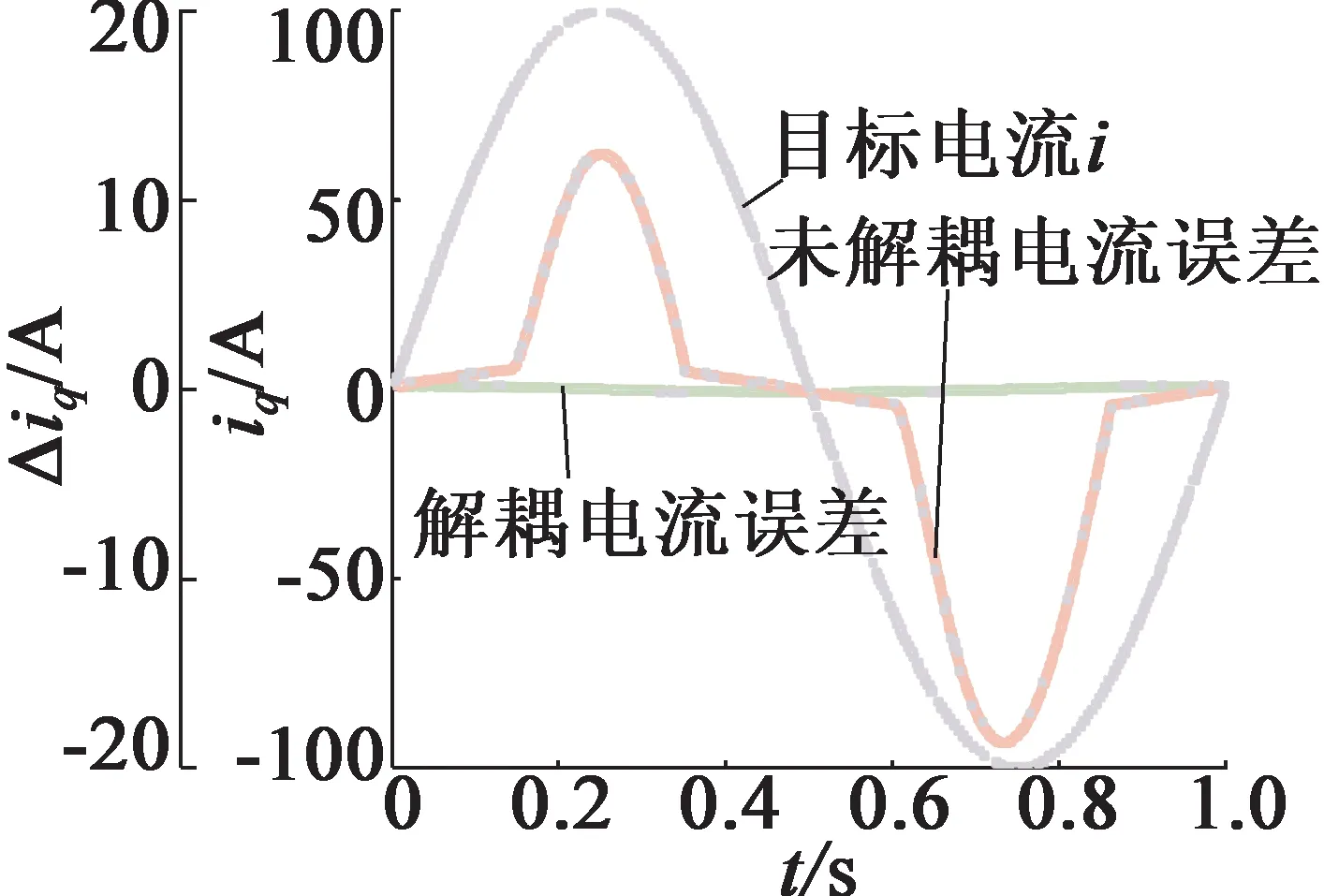
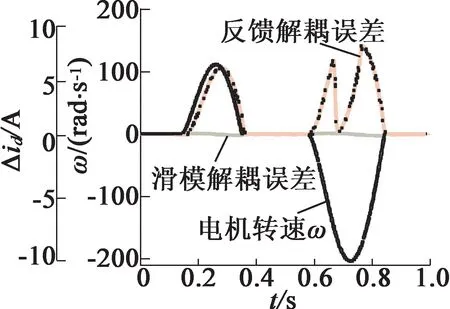
式中:-Δ 同样对连续滑模控制中的指数趋近律进行离散化,得: sd(k+1)-sd(k)=-qdTsd(k)-μdTsgn [sd(k)] (21) 式中:μd>0,qd>0,1-qdT>0;sgn()为符号函数。 把式(20)代入式(21),得: -qdTsd(k)-μdTsgn[sd(k)] (22) (23) 在式(16)给定d轴的电流控制率的基础上,增加对干扰项部分的控制率,可得: (24) 对式(21)进行变换得: (25) 由式(25)可知,当|pd|=1时,系统处于临界状态。由于pd<1总成立,所以pd=-1为系统唯一临界点。为了使|sd(k)|处于递减状态,需要满足: (26) 由式(21)和式(26)可知,系统对参数μd的需求呈现出一种矛盾的状态,趋近过程需要取其大,而准滑模状态时需要取其小。为了解决这种矛盾,令: (27) 结合式(24)和式(27),得到d轴的自适应离散滑模电流动态解耦下的补偿控制率: (28) 仿照d轴的实现过程,定义q轴的电流准滑模带: (29) 式中:-Δ 同理可知,q轴的自适应离散滑模电流动态解耦下的补偿控制率: (30) 为了抑制滑模颤抖的问题,采用饱和函数式(31)代替式(28)和式(30)中的符号函数: (31) 按照式(28),式(30),同时使用预测电流替代滞后电流,所建立的自适应离散滑模电流解耦算法的结构框图如图5所示。 图5 自适应离散滑模电流解耦的结构框图 选取李亚普诺夫函数: (32) 则离散滑模存在和到达性条件可表示: (33) 由于基于指数的离散趋近率式(21)满足: [sd(k+1)-sd(k)]sgn [sd(k)]={-qdsd(k)- 0.5|sd(k)|sgn[sd(k)]}Tsgn[sd(k)]=- (qd+0.5)T|sd(k)|<0 (34) 同时,当满足2-(qd+0.5)T>0时,则有: [sd(k+1)+sd(k)sgn[sd(k)]={(2-qdT)sd(k)- 0.5T|sd(k)|sgn[sd(k)]}sgn[sd(k)]= [2-(qd+0.5)T]|sd(k)|>0 (35) 同理可证q轴的自适应准滑模系统也满足上述关系。综上所述,设计的自适应离散滑模满足离散滑模的存在和到达性条件。 对于提出的自适应离散滑模电流解耦的鲁棒预测电流算法的性能进行仿真验证。为了更好的体现真实的工作情况,仿真中采用如图6所示的助力转向电机的参数:额定功率640 W,额定电流120 A,额定转速1 200 r/min,额定转矩5.1 N·m,定子电感54.06 μH,定子电阻12 mΩ,极对数为3。采用SVPWM调制方法,电流的采样周期和控制周期均为125 μs。由于是面向EPS系统的,所以采用d轴电流为0的控制策略。 图6 EPS用PMSM 在Simulink环境下的PMSM模型基础上,根据实际的控制系统进行仿真,其中电路部分搭建其所需的三相半桥驱动电路、蓄电池供电电路和电流信号采集电路;机械部分则搭建仿真轮胎的弹簧刚度和摩擦负载、扭矩传感器和系统的等效惯性;算法部分分别搭建了电流的坐标解耦算法、鲁棒电流预测算法、无差拍控制算法和自适应离散滑模电流解耦算法。对于算法参数设定方面,观测器增益选择Ke=0.4,滑模参数选为qd=100。机械参数方面,减速器的传动比为21,扭动弹簧刚度为100 π N·m/rad,动摩擦力矩为50 N·m,阻尼系数为1 N·m/(rad·s-1)。 如图7所示,在不考虑电机参数变动的前提下,给出了不加动态解耦和加动态解耦的鲁棒预测电流的仿真结果。为了使图形清晰明了,图中只显示了加动态解耦的电机转速曲线。测试工况:q轴目标电流设为频率为1 Hz、幅值为100 A的正弦电流信号(工况1)。由图7可知,随着转速的出现,未加动态解耦的系统误差随转速的增加而越来越大,而添加了动态解耦的系统误差基本不随转速变化。 (a) 未加动态解耦 (b) 加动态解耦 在控制电机的绕组电阻和d轴电感增加到标称值的2倍,q轴电感减小到标称值的0.5倍,同时减小观测器中电机模型的磁链为实际电机标称值的0.5倍的前提下,对只进行反馈解耦的鲁棒预测电流模型和增加自适应离散滑模电流解耦算法的模型进行仿真,所得到的仿真结果如图8所示。其测试工况:q轴目标电流在时间点0.2 s时发生变化,由0阶跃到90 A,后在0.2~0.5 s的期间缓慢变化到80 A,又在0.5 s时阶跃到-90 A,而后在0.5~0.8 s的期间缓慢增加到-80 A,最后在0.8 s时恢复到0(工况2)。由图8可知,参数的摄动对于只使用反馈解耦的系统影响较大,而对于使用自适应离散滑模解耦算法的系统影响较小,但系统在响应的过程中出现了瞬时的超调。由于没有增加弱磁控制,在0.6 s左右,电机转速超过了额定转速,导致反馈解耦电流发生畸变。 (a) 滑模解耦 (b) 反馈解耦 在不改变电机参数变化的前提下,将上述仿真试验中的工况2改为工况1,得到的仿真结果如图9所示。由于目标电流没有发生阶跃变化,所以仿真显示超调量较小。对比图8和图9可知,在没有过大超调的EPS系统中自适应离散滑模解耦算法下的鲁棒预测电流算法有较好的电流跟随效果和更低的系统误差。 (a) 滑模解耦 (b) 反馈解耦 在转子坐标系下的EPS用PMSM的基于鲁棒预测电流的无差拍控制中,为了解决其动态跟随性能受系统动态耦合的影响的问题,本文提出了一种自适应离散滑模电流解耦算法,它是在反馈解耦的基础上对解耦算法的一种补充。仿真结果表明:配合电机鲁棒预测电流的无差拍控制,在一定范围的电机参数摄动和外部干扰下,能够实现更高的电流跟踪精度和更快的电流响应速度,因此更适合高性能的EPS电机电流环的控制。 [1] 季学武,刘亚辉,杨凯明,等.乘用车电控转向系统的发展趋势[J].汽车安全与节能学报,2015,6(3):208-216. [2] 郑虎,周中坚. 汽车电动转向系统用驱动电机现状及其发展[J].上海汽车,2011,18(2):36-41. [3] 王伟华,肖曦. 永磁同步电机高动态响应电流控制方法研究[J].中国电机工程学报,2013,33(21):117-123,200. [4] KUIJUN L,BYOUNGGUN P,RAEYOUNG K,et al.Robust predictive current controller based on a disturbance estimator in a three-phase grid-connected Inverter[J].IEEE Transactions on Power Electronics,2012,27(1):276-283. [5] 牛里,杨明,王庚,等.基于无差拍控制的永磁同步电机鲁棒电流控制算法研究[J].中国电机工程学报,2013,33(15):78-85. [6] 张虎,张建伟,郭孔辉,等.基于扰动观测器的电动助力转向系统用永磁同步电机鲁棒预测电流控制[J].吉林大学学报(工学版),2015,45(3):711-718. [7] 王庚,杨明,牛里,等.永磁同步电机电流预测控制电流静差消除算法 [J].中国电机工程学报,2015,35(10):2544-2551. [8] 吴为,丁信忠.基于复矢量的电流环解耦控制方法研究[J].中国电机工程学报,2017,29(0):9-15. [9] 杨明,付博,李钊,等.永磁同步电动机矢量控制电压解耦控制研究[J].电气传动,2010,40(5):24-28. [10] 周华伟,温旭辉,赵峰,等.基于内模的永磁同步电机滑模电流解耦控制[J].中国电机工程学报,2012,32(15):91-99. [11] 王伟华,穆嘉毅,符容,等.混合动力汽车用凸极式永磁同步电机电流解耦控制方法[J].吉林大学学报(工学版),2017,47(3):693-700. [12] 刘金琨.滑模变结构控制MATLAB仿真(第3版):基本理论与设计方法[M].北京:清华大学出版社,2015:378-420.



3.3 自适应离散滑模电流解耦算法的存在和到达性证明
4 仿真分析与比较




5 结 语
猜你喜欢
卫星应用(2022年7期)2022-09-05卫星应用(2022年3期)2022-05-23卫星应用(2022年1期)2022-03-09北京航空航天大学学报(2019年9期)2019-10-26环球慈善(2019年6期)2019-09-25自动化学报(2019年6期)2019-07-23中国惯性技术学报(2019年6期)2019-03-04北京航空航天大学学报(2017年4期)2017-11-23自动化学报(2017年4期)2017-06-15北京航空航天大学学报(2016年7期)2016-11-16