力反馈手柄中PMSM矢量控制系统设计与验证
2018-04-27 05:02郭朝帽李文新魏志明
微特电机 2018年2期
郭朝帽,李文新,魏志明
(兰州空间技术物理研究所,兰州 730000)
0 引 言
机械臂操作手柄主要用于控制空间站机械臂从端的位置和姿态。基于力反馈的空间机械臂遥操作系统能够在视觉通道的基础上向操作人员提供规律性的反馈力,使操作者能够感知机械臂与从端环境的交互状态,获取逼真、沉浸式的临场操作感觉,便于完成各种环境未知、复杂、难度高、安全性要求高的任务。具备力反馈功能的主端控制手柄是实现上述遥操作的基础和关键。
目前民用领域力反馈手柄常用的驱动执行器主要有主动式和被动式两类,主动式包括电机、液压驱动、气体泵、形状记忆合金等;被动式包括制动器、离合器等,其中电机主要采用控制方法简单的直流电机。本文结合航天应用的特殊需求,选用低噪声、长寿命、高可靠性的永磁同步电机作为驱动执行器,采用id=0的矢量控制方法控制其电流环,使其输出稳定的力矩。由于力反馈手柄要求执行器输出高质量的力矩反馈,力矩波动产生的原因是多样的,本文在算法层面对力矩波动产生的原因进行分析,提出不同的改进措施并进行实验,实验结果良好。
1 力反馈手柄工作原理
力反馈手柄工作原理如图1所示。操作者通过操作手柄来施加运动,角位移传感器检测运动信息并传输到控制系统,控制系统操作机械臂按照一定规律运动,控制机械臂从端的姿态;同时,从端状态特征通过力反馈算法模块解算出所需要的反馈力大小并将其转化为手柄内电机驱动信号,电机伺服驱动模块接收驱动信号,驱动电机输出反馈力矩并通过手柄作用在人手上。其中电机伺服驱动模块接收力矩信息驱动电机产生稳定的反馈力矩,是决定力反馈手柄性能的关键模块。

图1 力反馈手柄工作原理图
2 矢量控制方案设计
2.1 矢量控制基本原理
矢量控制又叫磁场定向控制,其中心思想是分别通过Clarke变换和Park变换将永磁同步电机(以下简称PMSM)三相绕组等效为d-q坐标系下的两相绕组,等效后的d轴绕组产生的磁场方向与转子永磁体磁场方向重合,其作用只是改变气隙磁场强弱,对产生电磁转矩不起作用,因此被称为励磁分量。超前d轴90°电角度的q轴等效绕组产生的磁场方向与转子永磁体磁场方向正交,其相互作用力完全用于产生电磁转矩,被称为转矩分量[2-3]。通过单独控制d,q绕组电流,实现了力矩控制与励磁控制的解耦,使PMSM对输出力矩的控制像直流电动机控制中一样简单。
根据PMSM数学模型中的电磁转矩方程,选取id=0的矢量控制方法。当id=0时,定子电流中没有直轴分量id,只有交轴分量iq且定子磁动势的空间矢量与转子永磁体的磁场空间矢量正交,此时的电磁转矩方程[4]:
Te=pΨfiq
(1)
从式(1)可以看出,采用id=0控制时,电机电磁转矩只与定子电流的交流分量iq成线性关系,因此对电磁转矩Te的控制只需实现对iq的控制。
2.2 系统整体方案设计
力反馈手柄中要求实现PMSM输出转矩的线性控制。在矢量控制原理的基础上,确定了控制系统整体架构如图2所示。控制算法在DSP平台上实现,片上QEP模块接收电机编码器脉冲信号并计算出转子位置角θ;通过功率电阻采集两相电流信号并输送至DSP中,经Clarke和Park变换后得到反馈电流Id,Iq;Id,Iq分别与参考电流Idref,Iqref比较后产生控制量Vd,Vq,进而由Ipark变换得到Vα,Vβ,SVPWM模块通过Vα,Vβ信号产生相应的六路PWM信号,六路信号驱动逆变器产生相应的PWM电压控制定子绕组产生对应的磁场,进而与转子磁场相互作用产生所需的输出力矩。

图2 控制系统架构图
3 转矩波动分析与优化
PMSM转矩波动产生的原因是多种多样的。如电机本体的齿槽效应、磁路不对称、定转子不同轴等因素都会在不同程度上使电机产生转矩波动,这些因素可以通过对电机本体的优化设计加以改善。本文从控制算法层面分析转矩波动产生的原因,并在控制系统中寻求优化方案。
3.1 SVPWM过程中电流纹波分析方法
在电感已知情况下,SVPWM控制方法产生的开关纹波电流可由开关向量图获得。与电感压降相比,电阻压降可以忽略,这时,电流变化率可由电感压降方程得到[5]:
(2)
式中:Uout为期望的电压矢量;Uk为任意基本电压矢量,Uk的值符合:
(3)
一个开关周期中,各基本电压矢量只在作用的增量时间内激发出纹波电流[7]。每个基本电压矢量的电流可以写成:
(4)
(5)
(6)
零矢量产生的电流纹波与期望的电压矢量方向相反,其他纹波电流方向同施加的基本电压矢量与期望电压矢量的矢量差方向一致。以第一扇区为例,如图3所示。
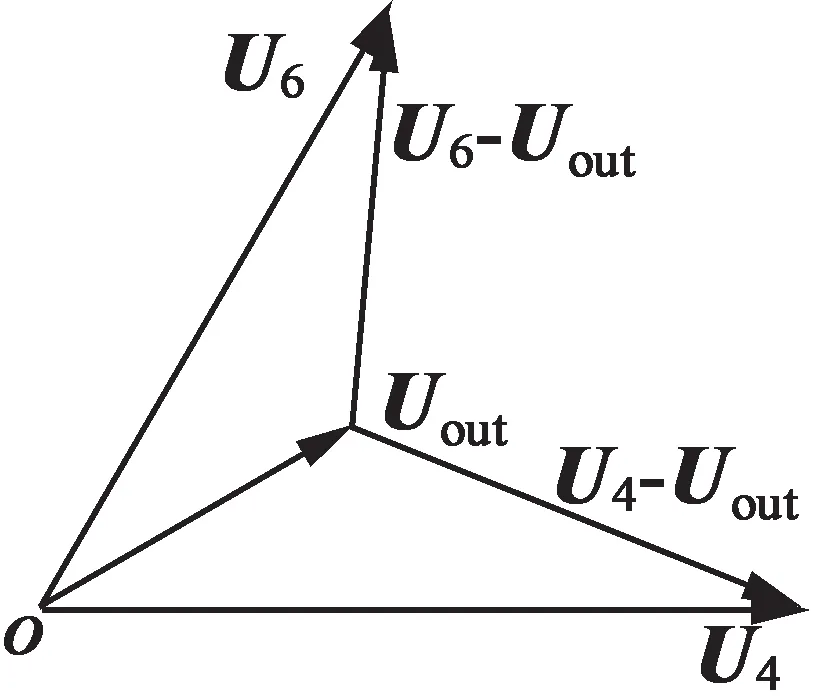
图3 计算纹波电流的电压差矢量图
3.2 5段式和7段式调制方法转矩波动分析
因电机感性绕组上的电流与加在绕组两端电压的作用时间成线性关系,故可用电压作用时间表示绕组上的电流矢量。对于5段式和7段式SVPWM控制方式产生的纹波电流可分别如图4(a)、图4(b)所示,沿Uout方向的偏差称为法向误差,垂直于Uout方向的偏差称为切向误差。对于PMSM,电磁转矩与转子磁链和定子电流的关系如下[6-7]:
Te=pψr×is
(7)
由式(7)可知转矩大小与二者叉乘成正比。如图5所示,目标电流矢量与转子磁链矢量是正交关系,切向偏差不影响两者叉乘的大小,法向偏差直接影响叉乘大小,是造成转矩波动的主要因素。根据纹波电流矢量图可分析出转矩波动情况,如图6所示,Te为输出转矩,Tout为转矩均值,ts为一个完整的PWM计算周期。很明显,7段式比5段式控制方法产生的转矩波动减小了50%。
(a) 5段式

(b) 7段式

图5 切、法偏差对转矩的影响

(a) 5段式

(b) 7段式
3.3 调制频率对转矩波动的影响
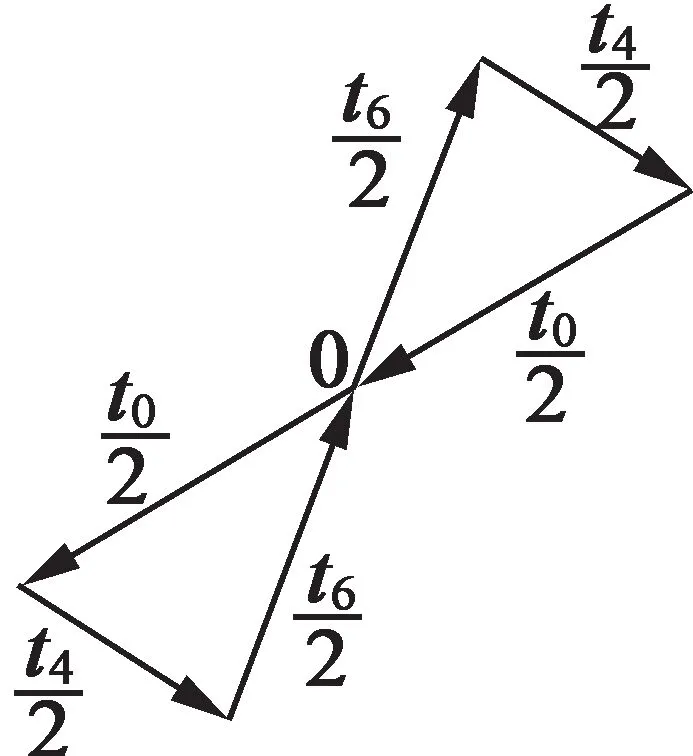
在每个采样周期内,只有保持有效矢量与零矢量交替作用,且不将两个有效矢量间隔开,才能保证转矩波动的稳定。沿用7段式策略的时序,只需改变调制三角波的周期为采样周期一半,如图7(a)所示,便能将各基本矢量等分为更多矢量。其纹波电流矢量图如图7(b)所示。可以看出,这种调制方式不仅使电流法向误差减小一半,同时切向误差也减小为原来的一半。7段式策略视每个采样周期开关切换6次,而5段式策略是每采样周期开关切换4次,7段式开关损耗比5段式高出25%。在力反馈手柄工况中,电机正常工作在抱死或反转发电状态,开关损耗不是主要矛盾,在一定范围提高开关频率以减小转矩波动的方案是可行的。

(a) 调制原理

(b) 预测纹波电流矢量图
3.4 滤波电路位置对转矩波动的影响
由于开关频率不可能无限高,因此算法层面对转矩波动的抑制是有限的。在控制回路中添加低通滤波电路能有效衰减掉高频电流纹波,进而消除纹波电流引起的纹波转矩。反馈回路中功率较低,低通滤波电路设在反馈回路中有体积小的优点。对该种滤波方式的控制系统建立仿真模型如图8所示,仿真结果如图9所示。结果显示该滤波方法对转矩波动的抑制效果不明显。
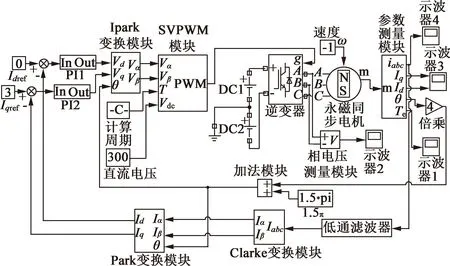
图8 反馈回路中滤波仿真模型

图9 反馈回路中滤波仿真结果
通过对矢量控制方法的理论研究,我们意识到控制回路中产生纹波电流的关键环节是PWM波产生模块,而在反馈回路中设置的滤波电路只是衰减掉了反馈回路中的纹波电流,经PWM产生模块后会继续产生纹波电流,而所产生的纹波电流存在于电机绕组中,因此会继续引起纹波转矩。那么,要抑制纹波转矩,必须将滤波电路设置在纹波电流产生之后且进入电机绕组之前。如图10所示,将低通滤波电路设置在逆变器和电机之间,通过适当调整滤波电路参数后的仿真结果如图11所示,结果显示该方法能有效地将转矩波动抑制为原来的12.5%左右。
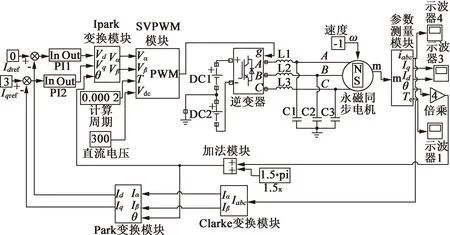
图10 电机前段滤波仿真模型

图11 电机前段滤波仿真结果
4 硬件实验平台
基于以上理论分析,最终确定采用7段式矢量控制策略,并在均衡功耗与转矩波动的基础上尽量提高调制频率。在电机前端设置了低通滤波器,以有效衰减纹波电流引起的转矩波动。
4.1 低通滤波器设计
滤波器是频率选择电路,只允许输入信号中的某些频率成分通过,而阻止其他频率成分到达输出端。低通滤波器是允许输入信号中较低频率的分量通过而阻止较高频率的分量。滤波器分有源滤波器和无源滤波器两种,其中有源滤波器结构复杂,且不适合应用于高电压大电流的场合,只适用于信号处理。结合本设计的应用环境,选择使用无源低通滤波器。对于无源低通滤波器,常用的又有RC低通滤波器和LC低通滤波器两种,前者适用于低频电路中,且其中的电阻会产生损耗,相比之下LC低通滤波器更适合本设计。
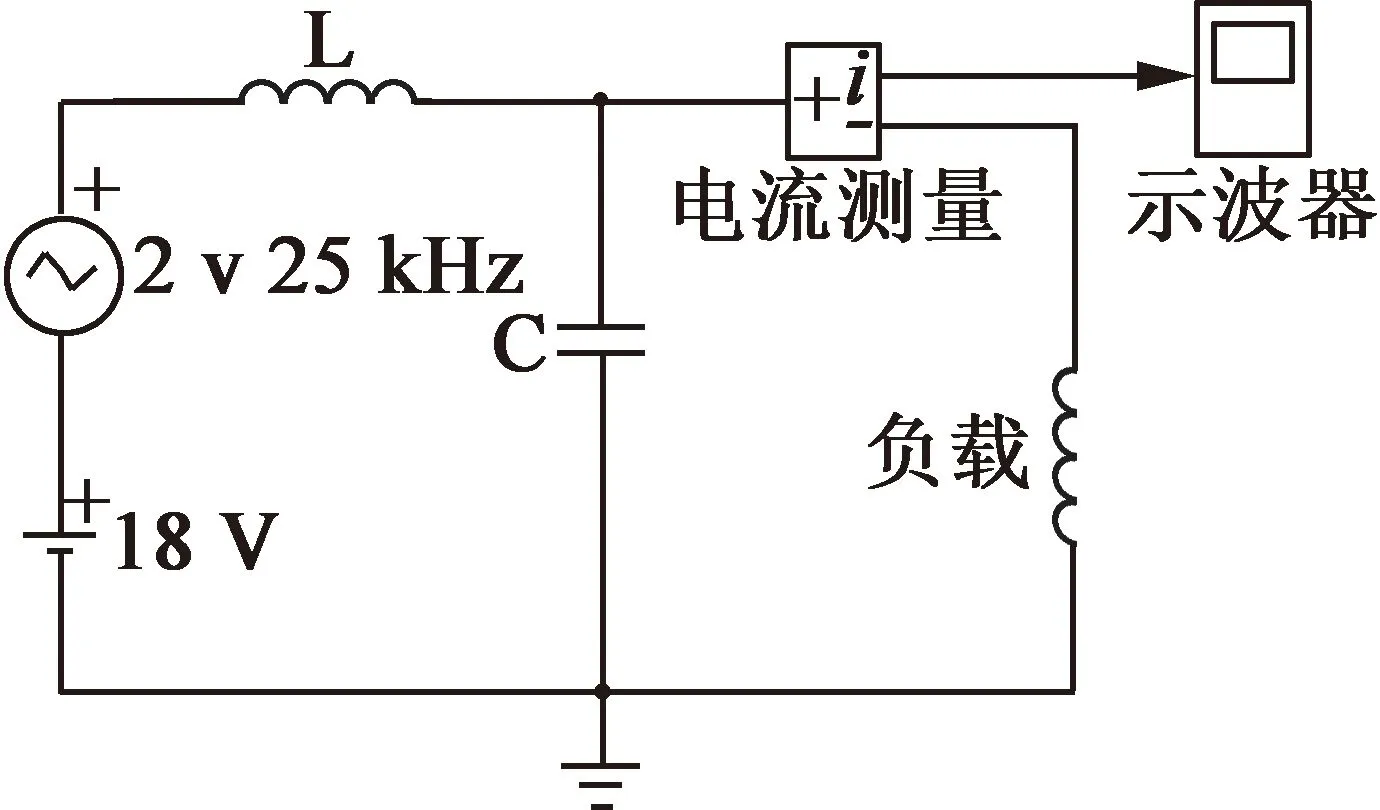
图12(a)为LC滤波电路仿真模型。本系统纹波电流频率为25 kHz左右,选择功率电感值为1.2 mH,电容为8.2 μF,其截止频率:
(8)
f=1.6 kHz,仿真结果如图12(b)所示,可有效衰减掉25 kHz的高频谐波至0.1%左右。图13为所设计滤波电路实物图。
(a) 仿真模型

(b) 仿真结果
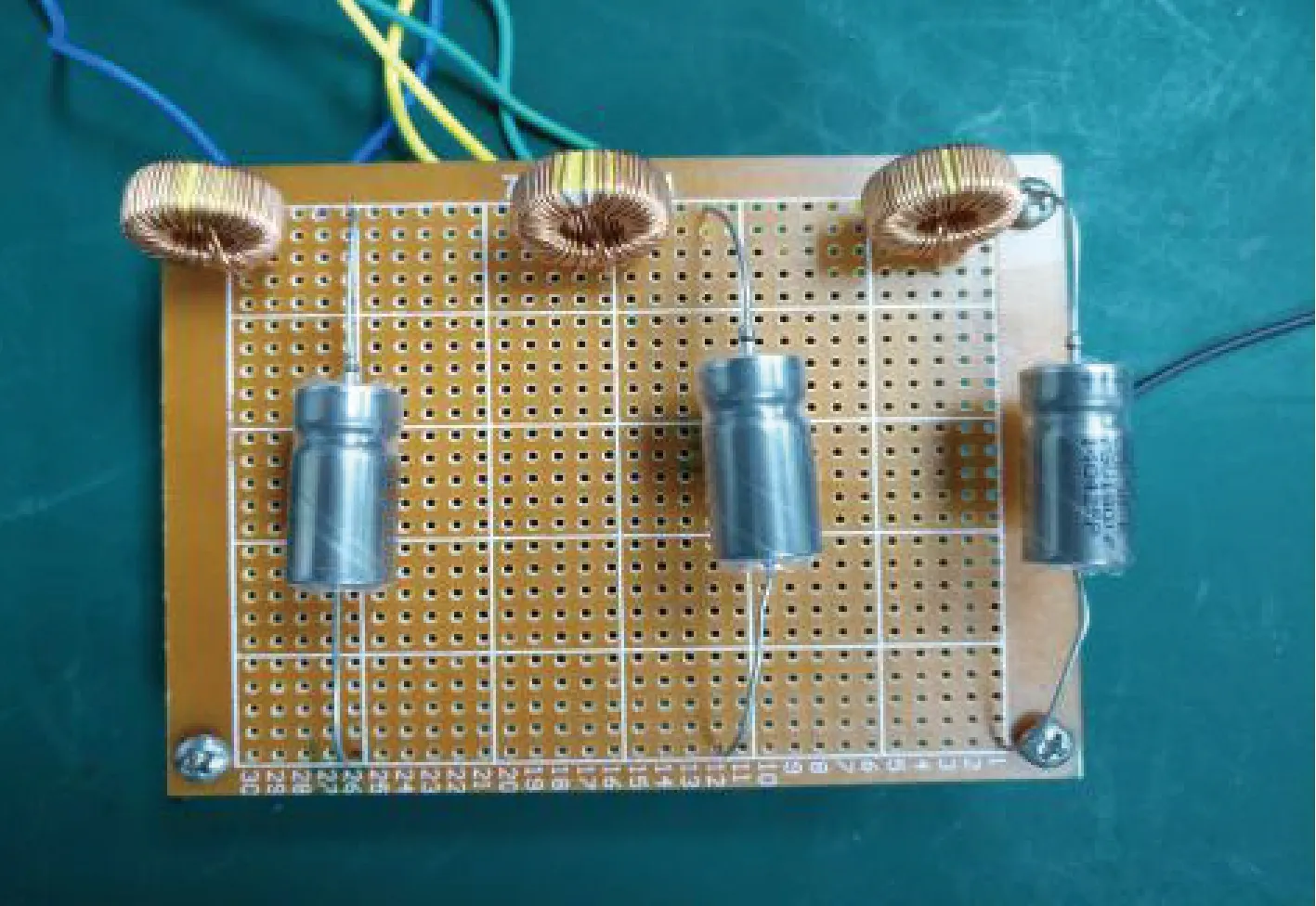
图13 LC滤波电路实物图
4.2 系统平台搭建
如图14所示,实验选用DBL064 PMSM,机身带1000线增量式编码器。编码器输出A,B,Z三路脉冲信号,通过A,B与Z信号的脉冲差可计算转子位置角θ。驱动板上通过功率电阻采集相电流,控制算法在DSP28035芯片内实现。在驱动板和电机之间设置LC低通滤波器,驱动板输出的PWM电压频率为25 kHz,滤波器截止频率设为5 kHz,可有效衰减SVPWM过程中产生的电流高频谐波。

图14 控制系统硬件实验平台
5 系统软件设计
软件流程图如图15所示,主函数首先进行一系列初始化设置,然后进入循环等待中断。依靠DSP的高速运算能力,核心控制算法放在中断函数中,程序采用模块化设计,其中PWM波的产生采用7段式策略,通过各模块顺序执行实现每个采样周期内产生PWM波的所有运算。主函数与中断函数协调工作,实现PMSM的矢量控制。

图15 软件流程图
6 实验结果及分析
根据前述的理论研究及控制系统的搭建,对所设计的控制方案进行了实验验证。首先进行了功能性验证,证明了该控制方案的可行性,但在实现稳定力矩输出的同时,转子有较明显的振动。直接测量转矩波动是较麻烦的,通过观察相电流纹波间接测量转矩波动是更加方便可行的。图16(a)是未加滤波电路的情况下,25 kHz调制频率下7段式矢量控制方案的实验结果;将调制频率倍频后相电流波形如图16(b)所示,很明显电流纹波减小了50%。
在调制波倍频的基础上,添加LC低通滤波电路于电机和逆变器之间,滤波电路截止频率为5 kHz,实验结果如图所示17(a),相电流中的高频纹波被有效衰减;放大图如图17(b)所示,结果显示电流纹波幅值被衰减为原来的5%左右,电流纹波引起的转矩波动自然也得到相同比例的抑制。另外,通过手作为负载去感受输出力矩,可明显感到转子振动基本消失,达到了力反馈手柄操作手感的要求。
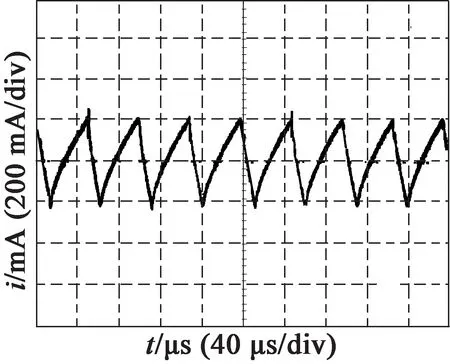
(a) 倍频前相电流波形

(b) 倍频后相电流波形

(a) 滤波后相电流波形

(b) 滤波后相电流波形放大图
7 结 语
伴随航天应用的发展,力反馈技术引入空间机械臂遥操作系统已成为必然趋势,而力反馈手柄是该系统的核心部件。针对太空特殊工作环境对力反馈手柄提出的高可靠性、低转矩波动的要求,本文提出一种以矢量控制算法驱动永磁同步电机产生反馈力矩的方案,并搭建了控制系统实验平台,通过实验验证了方案的可行性。对空间电压脉宽调制(SVPWM)过程中产生的纹波电流进行分析。在开关损耗不是主要矛盾的工况下,提出了调制波增频的7段式控制策略能有效地抑制转矩波动,在电机前段添加低通滤波电路以衰减纹波电流减小转矩波动,并通过实验验证了方案的有效性。实验结果表明转矩波动抑制在理想的力反馈手柄操作手感范围内。
[1] 陈伯时,陈敏逊. 交流调速系统[M].北京:机械工业出版社,2013.
[2] 俞小露,徐抒岩,曹小涛,胡君.基于FPGA多轴控制的SVPWM信号实现设计[J].电机与控制应用,2012,39(7):45-49.
[3] 周长攀,苏健勇,杨贵杰,等.基于双零序电压注入PWM策略的双三相永磁同步电机矢量控制[J].中国电机工程学报,2015,35(10):2522-2533.
[4] 张岳,沈建新.双三相感应电动机矢量控制调速系统建模与仿真[J],微特电机,2014,42(7):61-65.
[5] 郭朝帽,李文新,魏志明.力反馈中PMSM转矩波动分析与优化[J].微电机,2017,50(7):69-75.
[6] Anti Piippo,Marko Hinkkanen,Jorma Luomi.Analysis of an adaptive observer for sensorless control of interior pe rmanent magnet synchronous motors[J].IEEE,Transactions on Industrial Electronics,2008,55(2):570-576.
[7] KRISHNAN R,柴凤.永磁无刷电机及其驱动技术[M].北京:机械工业出版社,2012.
猜你喜欢
天津大学学报(自然科学与工程技术版)(2022年2期)2022-11-01
通信电源技术(2021年16期)2021-02-18
装备制造技术(2020年11期)2021-01-26
车辆与动力技术(2019年3期)2019-10-23
重型机械(2019年3期)2019-08-27
电子制作(2018年9期)2018-08-04
电子制作(2018年11期)2018-08-04
科技视界(2018年24期)2018-01-03
浙江大学学报(工学版)(2016年9期)2016-06-05
科普童话·百科探秘(2015年5期)2015-05-26