
基于曲率函数的简支梁动挠度识别研究
2018-05-02 02:36耿栋王乐沙卫福
安徽建筑 2018年2期
耿栋,王乐,沙卫福
(1.安徽省公路工程检测中心,安徽 合肥 230051;2.桥梁与隧道工程检测安徽省重点实验室,安徽 合肥 230051)
0 前言
在桥梁健康监测中挠度作为监测的关键指标之一,可以反映桥梁的刚度,评价桥梁质量及运营状态[1]。桥梁的动挠度,更是桥梁变形最为实时的体现,反映桥梁结构的动力特性和车辆荷载的冲击效应等。在桥梁挠度测量方法中,经纬仪、水准仪、百分表等方法是传统的方法,但这些传统的测量方法只适用于桥梁人工的短期测量。为了实现桥梁挠度的自动化长期测量,连通管法、激光图像法、GPS法等一些较新的测量方法逐渐涌现出来,并且已应用于桥梁挠度的测量中[2]。但是,这些较新的方法测量设备成本高昂,数据采集、存储要求高,同时受环境影响因素多。
近年来,由于分布式光纤光栅传感技术的成功应用,应变的测量效果得到了显著提高[3],因而使得基于应变测试的桥梁挠度测量方法获得了广泛关注和研究[4]。为了实现基于应变测量的桥梁动挠度识别,本文提出了一种基于曲率函数的简支梁动挠度识别方法。其基本原理是通过安装应变传感器进行梁结构动应变测试,利用结构的应变-曲率-挠度关系来识别出动挠曲线,进而实现对梁结构动挠度的测量。为了验证提出的方法的有效性及准确性,本文进行了数值算例模拟,对环境激励及移动荷载作用下的简支梁动挠度进行了数值模拟。数值算例的结果表明,基于曲率函数识别简支梁动挠度是可行的,且具有较高的精度。
1 应变、挠度、曲率之间的关系
应变是指结构承受应力时局部单位长度产生的变形量,用ε表示。对于梁结构来说,挠度是指梁弯曲变形时轴线沿与轴线垂直方向的线位移,用v表示;其轴线在平面内弯成的一条连续的曲线称之为挠曲线,如图1所示;曲率则是用来度量梁弯曲变形的程度,用k表示。

图1 梁结构挠曲线示意图

图2 梁微小单元体平面示意图
梁结构在弯曲变形时,在梁上取出一微小变形单元体,平面形式如图2所示。图中梁中性轴为线段O1O2,长度为dx,y为中性轴距梁底面的距离,ρ为曲率半径。根据材料力学知识可知,梁在发生弯曲时中性轴长度不变,而底面轴向长度lab将发生变化,变化量为Δs。

梁底面轴向单位长度的变形量,即应变ε大小为:

曲率半径的倒数就是曲率,从公式(2)中看的出,在梁同一横截面位置曲率与应变成线性比例关系。而弯曲变形的梁结构曲率又与挠度成一定的关系,具体的挠度与曲率关系可表示为:

公式(3)中,v表示梁上各横截面的挠度,是以位置坐标x为自变量的函数,其表达式称之为挠曲线方程,公式(3)也称之为梁挠曲线的微分方程。由于日常研究的梁结构变形属于小变形,挠曲线方程经两次微分后数值可忽略不计,因此公式(3)可写成下式:

从公式(4)中看出,对梁曲率函数二次积分可得到梁挠曲线方程,而梁结构上同一截面位置曲率又和应变成线性比例关系,因此不难发现,通过曲率可建立起挠度和应变之间的转换关系。
2 基于曲率函数识别梁结构动挠度
假设梁结构弯曲变形时曲率沿纵向呈线性变化关系,各横截面曲率值可通过在对应位置上安装应变传感器获取应变数值,根据应变-曲率关系式即公式(2)计算得到。计算公式中应变测试位置距截面中性轴的距离是作为已知条件的,在实际操作中应变测试位置距中性轴的距离可通过有限元模型计算获得。假设梁沿纵向曲率变化关系即曲率函数为一适当的多项式,计算出多个截面的曲率值之后,通过带入数值可求解出曲率函数的表达式。
对于结构形式简单的梁来说,如简支梁,一般弯曲变形时曲率函数可假设为二次多项式,表达式如下:

公式(5)中,a、b、c为多项式的 3 个未知系数,求解至少需带入3次数值,因此至少将梁划分为3个单元进行应变测试。
在测试出3个单元中间位置横截面的应变数值后,通过转换关系得到相应位置曲率值,曲率函数多项式系数的求解按下式进行:

公式(6)中,k(xn)表示曲率函数在第 n 个单元中间截面位置曲率值,表示第n个单元的始末端横坐标。
显然,假设曲率函数为二次多项式存在着误差,为减少误差可适当的提高多项式的阶次,阶数越高,结果越准确。对于阶次超过两次时,即公式(5)的未知系数超过3个,此时需将梁划分为多个单元进行应变测试,曲线拟合求解最优解[5]。
求解出梁的曲率函数,根据公式(4)可知,通过对曲率函数进行二次积分,并考虑边界条件,可计算得出梁的挠曲线方程,具体计算公式如下:

公式(7)中,v(x)为挠曲线方程;C1和 C2为常数,可通过考虑梁的边界条件计算得出。如若不考虑梁边界条件的变化,C1和 C2按公式(8)、公式(9)进行计算:
基于曲率函数识别梁结构动挠度,则对梁结构进行动应变测试,利用上述应变-曲率-挠度的转换关系识别出桥梁的动挠曲线,从而实现对动挠度的测量。
3 数值模拟
为了验证本文提出的方法在识别梁结构动挠度的有效性和准确性。本小节对移动荷载作用下的简支梁动挠度进行数值模拟。为模拟实际梁结构所受环境激励影响,数值模拟中对梁结构施加了白噪声激励。模拟梁为工字型简支梁,长500cm,高5cm,密度为2.7g/cm3,截面面积 2.52cm2,截面惯性矩 10.8cm4,弹性模量为70GPa。在对梁施加移动荷载之前,对梁施加一个均值为零,标准差为0.25g(g为重力加速度)的白噪声激励,移动荷载大小为10N,速度为1 m/s,作用时间为第3s开始,第8s结束。图3所示为数值模拟梁的平面示意图。

图3 数值模拟梁的平面示意图(单位:cm)
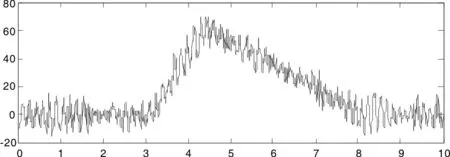
图4 梁底1/3跨位置的应变响应
图4所示为数值模拟梁底1/3跨位置的应变响应。利用梁底间距均匀的测点即1/6跨、1/3跨、1/2跨、2/3跨、5/6跨位置共5个测点的动应变数据进行基于曲率函数的简支梁动挠度识别,识别过程中假设曲率函数为四次多项式,将上述5个测点的应变数据转换为曲率数据,带入求解并积分获得梁动挠曲线,从而获得梁上每个位置的动挠度。图5所示为梁底1/4跨位置动挠度的识别值与理论值对比,图6所示为梁底跨中位置动挠度的识别值与理论值对比。按照公式(10)进行误差计算,结果如图7所示。通过图7可看出,利用本文提出的方法识别简支梁在移动荷载作用及环境激励下的动挠度误差在3%以内,具有较高的精度。
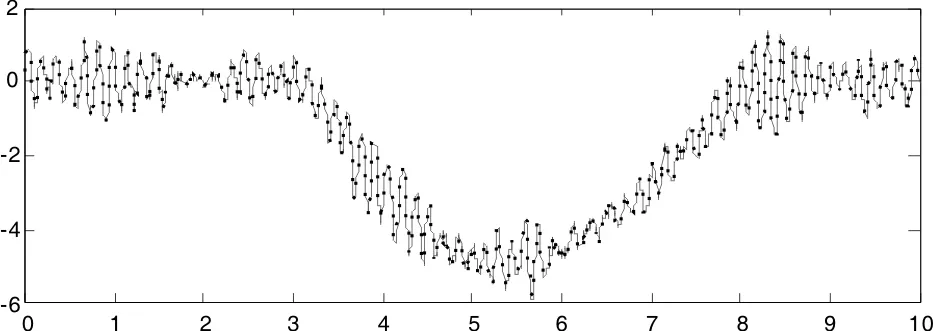
图5 移动荷载及环境激励作用下梁1/4跨位置动挠度识别值与理论值对比

图6 移动荷载及环境激励作用下梁跨中位置动挠度识别值与理论值对比
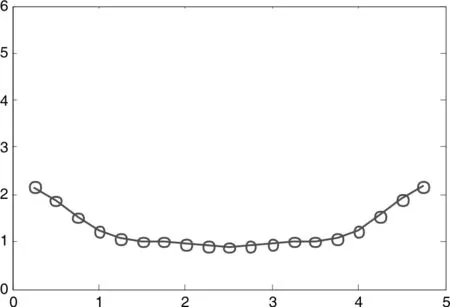
图7 移动荷载及环境激励作用下简支梁动挠度识别误差
4 结论
本文提出了一种基于曲率函数的简支梁动挠度识别方法。其基本原理是通过安装应变传感器进行梁结构动应变测试,利用结构的应变-曲率-挠度关系来识别出动挠曲线,进而实现对梁结构动挠度的测量。为了验证提出方法的有效性及准确性,本文对简支梁的动挠度进行了数值模拟。根据数值模拟的结果,得到以下几点结论:
①利用本文提出的方法识别简支梁在移动荷载及环境激励作用下动挠度误差在3%以内,具有较高的精度;
②根据理论推导可知,应变测点的布设位置及数量会对动挠度的识别结果产生影响。简支梁数值模拟结果表明,按均匀设置原则,利用5个测点动应变足以较精确识别出简支梁动挠度。
[1]孙鸿敏,李宏男.土木工程结构健康监测研究进展[J].防灾减灾工程学报,2003,Vol.23:38-44.
[2]杨建春,陈伟民,桥梁结构挠度自动监测技术的现状与发展[J].传感器与微系统,2006,Vol.25:1-3.
[3]沈圣,吴智深,杨才千等.基于分布式光纤应变传感技术的改进共轭梁法监测结构变形分布研究[J].土木工程学报,2010,Vol.43:63-70.
[4]杨才千,陈紫妍,吴智深,洪万.基于分布式光纤光栅传感的结构变形监测研究[J].第四届大跨径桥梁结构损伤预警及状态评估技术研讨会,南京,2012,172:-179.
[5]徐文华,孙学栋.奇异值分解求线性最小二乘解的理论分析[J].贵阳学院学报,2009,Vol.4 No.4.
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
新疆大学学报(自然科学版)(中英文)(2022年3期)2022-06-04
煤气与热力(2022年2期)2022-03-09
昆明医科大学学报(2022年1期)2022-02-28
兰州交通大学学报(2021年5期)2021-11-06
科学技术与工程(2021年28期)2021-10-21
中学生数理化·高一版(2021年11期)2021-09-05
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
汽车工程(2021年12期)2021-03-08
