
单旋翼油动无人施药直升机悬停状态下风场下洗气流分布规律研究
2018-05-09 01:19张宋超薛新宇周立新金永奎
中国农业文摘-农业工程 2018年3期
张宋超,薛新宇,孙 竹,周立新,金永奎
(农业部南京农业机械化研究所,南京 210014)
0 引言
无人施药直升机在作物上方飞行进行施药作业,对作业飞行空域要求低,一般不受作物种类、生长期的影响,能够高效的完成作业任务。旋翼高速旋转时推动空气,使得无人机能够脱离地面正常飞行,同时所产生的下洗气流能够辅助药液的沉积和在作物冠层中的穿透。旋翼产生的风场的覆盖宽度、下洗气流风速的大小将会直接影响到施药作业的效果。秦维彩等进行了N-3型农用无人机玉米田的喷洒试验,试验中,通过喷洒一定浓度的Rhodamine-B溶解液代替农药在旋翼风场的辅助作用下,通过改变飞机的作业高度,得出作业高度7m时,雾滴在目标上的总沉积量高于5和9m的结论。薛新宇等利用无人直升机对水稻稻飞虱和稻纵卷叶螟进行了防治,结果表明防治3、5、10d后的防治效果均优于传统担架式喷雾机喷洒防治效果。张宋超、薛新宇等通过计算机模拟和试验验证方式研究了旋翼下洗气流作用下,雾滴在作物冠层各个层面的沉积情况,并对飘移量进行了统计,结论指出作物(水稻)冠层上部(upper layer)的平均沉积量占总喷洒量的28%,下部(under layer)的平均沉积量占总喷洒量的26%,非靶标处(non-target area)飘移量占总喷洒量的12.9%,且90%的飘移发生在距离靶标区域(target area)8m范围内。在无人直升机风场研究方面,可查阅的文献显示在军事方面的研究居多:国内外学者先后发展出了动量理论、叶素理论、旋翼涡流理论等,用于指导旋翼设计和提高直升机升力与控制灵活度;招启军等建立了三维欧拉方程数值模拟旋翼流场的方法和模型,为火箭导弹发射提供了一种旋翼下洗气流计算方法;任利锋等基于叶素理论采用Fluent软件进行了数值模拟,研究了旋翼下洗气流对排气喷流的影响。以上研究侧重于直升机旋翼气动特性,对研究农用无人机旋翼下洗气流有一定的借鉴作用。国外农业航空发达国家多以有人驾驶固定翼农用飞机应用为主,而在农用无人机风场尤其是农用无人施药直升机的风场研究甚少,近年来才展开了一些初步的研究:Y.Lee等和T.Edward Lee等,利用水雾或彩色烟雾作为了无人直升机风场形态;Thomson等通过试验研究发现了旋翼风场作用时机身左、右侧喷洒飘移的差异性。国内在农用无人直升机风场研究方面,仅李继宇,汪沛,胡炼等研究了旋翼下洗气流在杂交水稻辅助授粉方面的应用,并设计了相应的测试系统和方法,得出结果用于优化旋翼直升机辅助授粉作业,Bin Zhang等对固定翼农用飞机画眉鸟510G(Trush510G)近地的尾流进行了研究从而优化固定翼农用飞机的航空施药作业,而对直升机风场在航空施药方面的研究鲜见报道。
综上所述国内外科研成果,国内外学者在直升机风场研究方面已经有了一些研究积累,而在农用领域里风场的作用研究较少。鉴于此,本文采用计算流体力学方法对旋翼风场进行了模拟,并设计开发了一套无人施药直升机风场测量平台,应用此平台对N-3型无人施药直升机的旋翼风场中主要影响雾滴沉积分布的下洗气流进行了系统测量和分析,目的在于探明近地风速分布情况,以期决策出较佳的无人施药直升机机载喷洒装备的装配参数、作业飞行高度、有效喷幅等,为无人施药直升机的发展应用提供支撑。
1 材料与方法
1.1 模型建立
N-3型无人施药直升机如图1所示,为单旋翼油动型,动力源为汽油发动机,详细参数见表1,物理尺寸测量见图2。
CFD建模与模拟方法及过程参照张宋超等的数值模拟过程,具体分为:在预处理软件Gambit中将机体进行网格化处理,对机身采用非均匀有理B样条曲面进行过渡,得到机身网格如图3所示。

图1 N-3无人直升机

表1 N-3型无人机主要参数

图2 N-3无人直升机物理尺寸测量

图3 直升机机身网格示意图
1.2 风场模拟
N-S方程数学通用形式见方程(1)。

方程(1)中:ψ为通用变量;ζ为广义扩散系数;S为广义源项。
kω-sst湍流模型:标准的k-ω模型在壁面附近不需要附加阻尼项,也不需要定义离壁面的法向距离,适合用于较复杂的集合边界;sst模型中对来流涡流强度比较敏感。kω-sst湍流模型在标准kω模型上发展而来,对湍流粘性的定义根据湍流剪切应力的输运做了调整,此外模型常数也做了相应的改变,最好在ω方程中添加了一个阻尼耗散项。kω-sst湍流模型中主要方程的定义和表达如下。
按照无量纲形式,ρk和ρω守恒型输运方程可写作:

kω-sst湍流方程变量系数定义为:

其中:

kω-sst湍流方程的湍流动力粘性系数定义为:

其中:

k方程的生成项:

ω方程的生成项:

k方程和ω方程的湍流摧毁项分别为:


ω方程的湍流耗散项:

kω-sst模型通过引入混合函数F1和F2对标准模型修正,在远离壁面的区域,F1→0、F2→0,近壁面处F1→1、F2→1,无量纲条件下混合函数定义如下:

其中:

kω-sst模型中常数选择见表2。
采用二阶迎风格式对控制方程进行离散,通量计算采用Roe格式;采用高斯-赛德尔方法进行网格迭代计算;初始条件设为大气温度303K,远场静压101.325kPa,空气粘度1.9×10-4Pa·s,假定计算中流场中空气无压缩。

表2 kω-sst模型中常数选择
1.3 风场测量试验
1.3.1 风速测量装置的选择
测量装置选用美国Nielsen-Kellerman(NK)公司的Kestrel 4500型旋转风杯式风速仪,2节AAA电池供电,其内部采用高精度枢轴和轻型延伸叶片,可将测量数据和环境参数存储到内部储存其中(2 900组数据,最大数据采样频率下,约30min存满数据),风速测量最大量程40m/s,精度±3%,分辨率0.1m/s,满足试验测量要求。另外其体积小巧,可减小测量过程中对风场的影响从而提高测量精度。所采集数据,可通过相配套的数据读取装置(Kestrel Interface)和用户软件,将所采集和存储的数据信息导入PC机。Kestrel 4500实物图和相关组件如图4所示。

图4 风速仪及相关组件
1.3.2 风场测试台设计
风场测试台主体为单柱移动式液压升降机构,升降范围为1~10m,最大载重量为200kg。在液压伸缩缸最顶端安装0.8×0.8m不锈钢固定平台,平台上平行安装2根带槽的铝合金条,用T型螺栓和螺母将无人机的起落架固定在0.5×0.06×0.06m铝质型材上;平台四周各打孔固定一根螺栓,用于与地面固定的可调节刚性缆索连接;升降台的动力由1台功率为2.5kw的交流电机提供;升降平台底部安装4个万向轮和方向牵引轮及手柄。
同时,为了保证试验过程的安全性和试验的方便性,在试验场地修建了12×2.0×1.5m(长×宽×高)的水泥地槽,试验前将升降台下降至地面高度,安装无人机,试验时可通过地槽处固定部件(槽钢等)的调整减小振动。测试平台的试验安装如图5所示。

图5 测试平台及试验安装
1.3.3 试验场地
试验场地位于江苏省南京市农业部南京农业机械化研究所东区实验室户外(118°52′20.58″E,30°02′39.38″)进行,平均气温30.2℃,平均相对湿度71.2%,环境风速小于0.5m/s。
1.3.4 测量方向的定义
测量到的风场数据更针对性地用于指导航空施药,考虑到无人施药直升机实际作业对象水稻、小麦、玉米、油菜等一般生长高度最高约2m左右,N-3型无人施药直升机飞行高度7m时候有效喷幅以7m计并留出一定裕度(1m),试验中设计了“米-环形放射状布点法”,将无人施药直升机分别升至距地面5、6、7m处(气压高度计距地面高度),纵向、径向以0.5m为步长,测量了半径为4m、高度为2.5m的立体圆柱空间。
以图1所示三维坐标系为基准,以旋翼主轴和地面相交处为圆心O,X轴正半轴为起始方向D1,俯视逆时针每间隔45°设定一个测量方向,依次为D2、D3、D4、D5、D6、D7和D8,共8个方向,如图6所示。从圆心O处由内向外沿8个方向,步长选择为0.5m。

图6 测量方向的定义
1.3.5 测量点的布置
采用固定在可移动底座上3.0×0.06×0.06m的铝质型材,D1~D8方向每间隔0.5m处取一设定点,纵向从下至上每隔0.5m做一刻度标记,试验中根据需要将风速仪固定在与每个刻度相同高度处,进行测量。图7所示为试验测量方法布置左视图(X轴负半轴向正半轴方向)。

图7 测量方法布置图
1.3.6 风速测量方法
垂直向下的气流对农药药液雾滴在作物下部的穿透率、沉积率的影响最为显著,在病虫害防治方面具有重要意义。因此,试验中直接对风场的垂直向下洗气流进行系统测量。试验中,将风速仪固定在可移动的铝质型材上刻度处,叶片轮与地面平行放置,保证迎风端垂直向上,开启自动存储模式,采样周期设为2s;N-3型无人施药直升机分别升至5、6、和7m处,待其稳定至额定工作状态(详见表1)下开始测量;依次从D1至D8测量,每个采样点每次测量1min,重复3次,取测量数据平均值,以保证试验数据的准确性;用木板将水泥地槽进行封闭,减小地槽对风场下洗气流的影响。
2 结果与分析
用“米-环形放射状布点法”,不同的无人直升机高度下对旋翼风场的垂直向风力进行了测量。本研究目的在于N-3型无人施药直升机的有效风场覆盖范围,用于优化机载喷洒装置的装配、判断下洗气流对雾滴作用的最佳区域,故测量结果按照径向距离和垂直高度向进行分析。
2.1 模拟结果分析
将施药直升机至于5、6、7m高度于对旋翼风场进行了模拟分析,得出风场矢量分布图,图8为无人直升机被置于5m高度时的模拟分成风速分布图,重点分析垂直向下风速的大小分布情况。

图8 模拟风场风速分布(5m)
根据分析结果可以看出:悬停状态下,风场垂直向下的气流起主导作用,在旋翼范围边缘处有气流涡旋现象出现,符合预期;旋翼下方风速值分布范围主要在0.622~12.08m/s之间,下洗气流风速值较大区域集中在旋翼的1/4~3/4处(以O点径向计)下方;从主旋翼中心轴(O点)径向风速值呈现先由小变大,再由大变小的趋势;近地面风速大小分布规律不明显,原因分析受到地面效应影响;在软件模拟中,假设环境因素(湿度、温度等)保持恒定,风速为0m/s的情况下,N-3型无人施药直升机被置于5、6、7m高度下,模拟出的下洗气流变化值差异不大,且变化规律较为一致。
2.2 试验测量数据分析
2.2.1 测量数据方差分析处理
按照上述装置和测量方法,对N-3型无人施药直升机悬停状态下5、6、7m高度时的下洗气流进行了实际测量。对采集的3个高度(5、6、7m)、8个方向(D1~D8)上数据按照公式(15)进行标准差处理,得到图9、图10和图11。

其中:σ为标准差,单位m;N为样本个数,取值30;Xi为样本值,单位m;u为一组样本的平均值,单位m。

图9 5m高度下样本标准差

图10 6m高度下样本标准差

图11 7m高度下样本标准差
图9、图10和图11中,分别显示了无人直升机5、6和7m,测量高度0.5、1.0、1.5、2.0和2.5m条件下,D1至D8方向测量结果的标准差。由图可看出所采集数据的绝大部分的标准差都小于2m,最大的标准差超过3.5m(3.67m,6m高度,测量高度2m,D4径向距离2.0m处)。
图12是对5、6、和7m无人机高度下总体样本进行标准差分析的对比,由图可知,3个高度下总体数据的标准差都小于1m,表明所获取的测量数据可以相对准确地表征风场风速大小情况;3个高度下总体数据的标准差相比较σ5m<σ6m<σ7m,表明在无人机高度5m条件下,试验测量的数据总体离散程度小,此时更能准确地表征出风场风速大小分布情况。
基于此,本文重点研究分析无人直升机5m高度下旋翼风场的下洗气流。

图12 5、6、7m高度下总体样本标准差对比
2.2.2 不同径向距离下洗气流分析
图13至图17分别是无人机高度5m,测量高度0.5、1.0、1.5、2.0和2.5m处,D1~D8八个方向下洗气流测量数据统计趋势图。
从数据可看出:(1)下洗气流测量值径向整体上呈现由小变大,再由大变小趋势,以2.0m和2.5m测量高度下D1~D8方向测量值最为明显,与模拟趋势保持较好的一致性;(2)下洗气流最大测量值为11.37m/s,风速值较大区间为径向0.5m~1.5m之间,与旋翼半径尺寸的1/4~3/4(大约0.38m~1.168m)覆盖相符,与模拟数值的风速值较大集中区域吻合;(3)地面效应对测量结果的影响主要反映在0.5m测量高度下D1~D8方向测量值中,变化曲线相比其它集中测量高度下最为波动,单调性最弱。

图13 0.5m测量高度下D1~D8方向测量值

图14 1.0m测量高度下D1~D8方向测量值

图15 1.5m测量高度下D1~D8方向测量值

图16 2.0m测量高度下D1~D8方向测量值
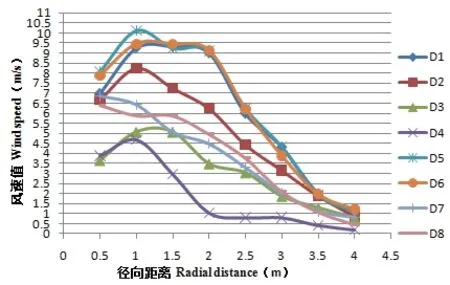
图17 2.5m测量高度下D1~D8方向测量值
图18至图25 分别是无人机高度5m,测量径向距离0.5、1.0、1.5、2.0、2.5、3.0、3.5和4.0m处a、b、c、d、e、f、g和h轴向0.5~2.5m之间下洗气流测量值统计趋势图。从图中可分析出:(1)同一测量点(如D1-a),随着测量高度增加,所测量得到的风速值呈现上升趋势(共计64条趋势曲线,其中55条吻合该变化趋势);(2)由于旋翼风场的复杂性,导致相同径向距离时,同一高度下的下洗气流风速测量值并不相同,最大差值约有10m/s(D5-d和D4-d在轴向2m处);(3)分析趋势图,在轴向高度1m处左右,曲线呈现凹状,说明在1m高度处左右下洗气流的风速值出现了极小值区间;(4)分析趋势图,在轴向高度2m处左右,曲线呈现凸状,说明在2m高度处左右下洗气流的风速值出现了极大值区间。

图18 径向0.5m a点处轴向下洗气流测量值

图19 径向1.0m b点处轴向下洗气流测量值

图20 径向1.5m c点处轴向下洗气流测量值

图21 径向2.0m d点处轴向下洗气流测量值

图22 径向2.5m e点处轴向下洗气流测量值

图23 径向3.0m f点处轴向下洗气流测量值

图24 径向3.5m g点处轴向下洗气流测量值

图25 径向4.0m h点处轴向下洗气流测量值
2.3 结果分析
2.3.1 误差分析
通过计算机模拟和试验验证分别测得了旋翼风场的下洗气流分布。考虑到软件模拟中由于忽略了空气的可压缩性、环境风速、地面效应等因素,这里以试验测量值为准确值,定义模拟结果与试验结果的相对误差计算公式为:

式中:eq—试验中测得的风速值,单位m/s,sq—模拟求得的风速值,单位m/s。
限于篇幅,现给出无人机高度6m,D1方向各测量测量高度下下洗气流实验值与模拟值,如表3所示。
从表3中,可得出:① 在84×3组数据中,模拟数值接近或大于实验测量值的情况较多,而小于实验测量值的情况相对较少,分析原因,在计算机模拟旋翼风场计算下洗气流时理想化地进行了一些假设,如空气的不可压缩性、环境温度对气流运动影响的可忽略性、地面反弹气流的影响可忽略性等,也因此以实验测量值为准确值更为科学;②在测量高度为0.5m的情况下,实验值、模拟值以及实验值与模拟值的比值出现交替大小情况更为明显,也验证了上文中提及的地面效应的存在;③从相对误差限的角度来分析,除了受到地面效应影响的0.5m高度下的相对误差限较大(最大值11.20),其他情况下的相对误差限的值较小,其中最小为0.03;④除了0.5m测量高度情况下,整体最大相对误差不超过0.70,在径向距离3.0m以内此现象最为明显,验证了模拟数据相对于真实实验测量数据的置信度。

表3 实验值与模拟值对比(D1)
2.3.2 曲线拟合分析
在无人机高度6m情况下以实验测量值为真实值,将试验测量值与CFD模拟数值进行多项式拟合分析,分别得到测量高度0.5、1.0、1.5、2.0和2.5m时D1方向上测量值与模拟值的拟合曲线。
拟合多项式和决定系数如下:



图26 模拟值与实验测量值多项式拟合分析
图26中a、b、c、d、e分别为以实验测量值为横坐标,计算机模拟值为纵坐标,在直角坐标系内的多项式拟合曲线,拟合多项式和决定系数R2分别如下:

多项式曲线拟合中,测量高度1.0m、2.0m处选择5次多项以外(6次拟合多项式时数值出现负数,失真),其他高度下均采用6次多项式。在测量高度0.5m的情况下,多项式拟合决定系数最小,仅为0.703 6,说明此时模拟数值的理想度较高,导致与实际测量值的偏差较大;而其他测量高度下(无人机悬停6m)实验测量值和模拟值的多项数拟合决定系数均超过0.75,表示多项式拟合方程具有一定的参考价值。
3 讨论与结论
研究了N-3型单旋翼无人直升机旋翼风场下洗气流分布情况,以期为航空施药作业中喷洒装备的安装布局、喷洒幅宽的优化提供参考依据。
1)分别采用CFD模拟和实验测量方法对单旋翼无人直升机旋翼风场下洗气流分布进行了研究,研究表明N-3型农用无人机旋翼风场下洗气流有效覆盖半径约为3m(5m高度下,覆盖边界风速以0.5m/s计),约为旋翼半径的2倍值,可为航空喷洒作业中最大有效喷幅的设定提供决策。
2)模拟数值和实验数值均表明下洗气流风速值以旋翼主轴为圆心径向呈现先由小变大,再由大变小的趋势,风速值较大区域集中在旋翼半径长度的1/4~3/4长度处。在同一径向距离处,随着高度的增加下洗气流风速值总体呈现先由大变小再迅速变大趋势,在1m左右高度处出现风速极小值区间,在2m左右高度处出现极大值区间。上述结论可为最佳作业飞行高度决策提供依据以保证风力辅助作用下最大的药液雾滴的沉降。
3)总体而言模拟数值较实验测量值偏大(因一些必要的假设前提),对模拟数据和实验数据进行了比较和拟合分析,除了近地处(<1m范围)的数据吻合度不高,整体数值的最大相对误差不超过0.7,多项式拟合的决定系数达到或超过0.75,表征了模型建立的准确性,以及拟合方程的参考价值。
4)本文研究中为了模型的方便构建,进行了一些必要的假设,以根据模拟数值和实验测量数值为依据,局部的下洗气流(近地处,受到地面效应影响)的分布规律尚未完全探索明白。另外,受到实验条件限制,在实验中挑选了最为关心的方向、高度下下洗气流进行了研究,后续完整的旋翼风场研究有待进一步探索。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
海洋通报(2021年5期)2021-12-21
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年3期)2021-06-09
航空发动机(2021年1期)2021-05-22
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2017年2期)2017-11-24
