
收发一体式无线电高度表设计
2018-05-10 08:41陶德桂刘关心
宇航计测技术 2018年1期
陶德桂 刘关心
(中国人民解放军92419部队,辽宁兴城 125106)
1 引 言
在国防武器装备发展建设中需要用到大量的低高度掠海飞行器模拟导弹类目标,而这类目标的可靠飞行严重依赖于无线电高度表提供相对于海平面的准确高度值。目前市面上常见的无线电高度表套件由单独的收发天线、馈线和主体设备组成[1],其集成度低,且成本高。在使用过程中,为了保证一定的收发信号隔离度,通常是收发天线需要分开安装且与无线电高度表通过馈线相连接,所占用的空间较多,重量相对较大,制约了其在对体积和重量要求苛刻的中小型低高度掠海飞行器上的应用。
随着科技的进步,新的元器件和集成电路大量涌现,其中德国InnoSenT公司生产的IVS948模块是一款K波段自带VCO的小功率雷达收发器[2],用户可以利用其编程功能自行设置发射频率、输出功率及内部中频放大器的增益。基于此模块,本文设计了一种收发一体式的无线电高度表,其优点是集成度高、体积小、重量轻、成本低,可满足低高度掠海飞行器的高度测量需求。
2 硬件设计
无线电高度表硬件部分主要由收发天线、射频前端、基带信号产生与处理单元和二次电源组成,如图1所示。

图1 无线电高度表硬件结构组成Fig.1 Composition of the radio altimeter’s hardware
IVS948模块实物照片如图2所示。该模块最大输出功率可达26dBm,-3dB波束宽度为14°×32°,旁瓣抑制比可达25dB,而其几何尺寸仅为65.8mm×70mm×9mm,重量仅为80g,该模块是实现收发一体式无线电高度表的物质基础和前提。

图2 IVS948的实物照片Fig.2 Photo of IVS948
IVS948可工作在连续波(CW)和调频连续波(FMCW)两种方式。我们选择IVS948工作在调频连续波方式下,并通过设置VTune Coarse和VTune Fine产生所需的发射信号。VTuneCoarse设置为一个预置电压值(≈1.2V@24.125GHz),以确保发射频率处于允许的频带范围内。在FMCW模式下,从参考频率输出引脚Pin 1,可读取被1/X分频(缺省值65536)的发射频率fmuxout,计算该频率可以辅助确定VCO的调谐电压。
基带信号产生与处理单元产生IVS948所需的调制信号和控制信号,接收其输出的中频信号进行A/D转换和信号处理从而得到高度测量结果,并将测高结果通过接口输出。
基带信号产生与处理单元的核心处理器选用TMS320C6747 DSP芯片[3],该芯片为浮点处理器,运算速度快,可满足FFT和CZT运算速度的需要;外设接口丰富,可满足系统要求,减少器件数量,简化系统设计。系统所需的ADC、DAC和接口电路直接与DSP的外设接口相连,其外围电路仅增加串行Flash程序存储器和晶体谐振器。DSP软件程序存储在外部Flash存储器,设备上电后自动加载到内部存储器内运行。
IVS948的控制信号为SPI接口信号,用于设置PLL和增益,与DSP的SPI接口直接相连。
IVS948的调制信号有两个,一个是粗调信号,用于调整其中心频率,一个是细调信号,用于控制调频斜率。在细调信号端加入三角波使得IVS948输出相应的调频信号,粗调信号的幅度则用来调整调频信号的中心频率。调制信号由DAC转换产生,选用DAC8563,与DSP直接通过SPI口相连,调制波形和幅度由DSP软件控制。
IVS948输出的I路和Q路中频信号,通过ADC转换到数字信号,芯片选用THS12082,其并行输出接口直接与DSP的EMIF相连。
高度测量结果数据输出接口采用RS232串行接口,DSP有3个UART串行口,只需增加RS232接口电平转换电路就能实现,转换芯片采用MAX3224芯片。
3 测量体制比较及选择
无线电高度表根据发射信号的调制方式不同,一般可分为脉冲体制、调相体制、调频连续波体制。其中调频连续波体制因为具有线路简单、易实现、可靠性高、体积小、重量轻、抗干扰能力强等优点,目前被业界广泛采用[4]。
这里我们采用线性调频连续波体制以匹配IVS948模块来设计无线电高度表,该体制的调制信号又可采用锯齿波和三角波两种形式[5,6]。
首先介绍一下锯齿波调制信号的测距原理。
设调制信号Φ(t)为:

经过调制后的发射信号为:

式中:f0——载波频率。
对于点目标,回波信号ur()t为:

式中:Td——接收信号延迟;α——相位延迟。
Td与载体的飞行高度H有关,即:


图3所示为锯齿波调频连续波雷达频率-时间关系,图中虚线代表接收信号,实线代表发射信号。

图3 锯齿波调频连续波雷达频率-时间关系Fig.3 Frequency time relation of FMCW radar with sawtooth wave
上式表明,由高度变化率引起的多普勒效应等效为回波信号相对于发射信号载频的平移。

对式(6)的相位微分,得到瞬时差拍频率fb()t为:

式(7)表明,多普勒效应引起差拍频率平移了频率fd。
当fd=0时,有:

变形即得:

实际使用过程中,运动载体会在高度上发生变化,不可避免会产生高度方向的多普勒频率fd,这样对于采用锯齿波调制信号进行测距时,所测得的差拍信号是包含有多普勒频率fd的,如果我们无法实时获取多普勒频率,则通过上式计算的高度值是不够准确的,或者说对测距误差有影响。
相对于锯齿波调制信号,采用三角波调制信号则可以消除多普勒频率对测距的影响,减小测距误差,且可实现对运动载体径向速度的测量。
设三角波调制信号Φ(t)为:

如图4所示为无多普勒效应时对称三角波调制的特性曲线。

图4 对称三角波调频连续波雷达频率-时间关系Fig.4 Frequency time relation of FMCW radar with symmetry triangular wave
根据上面的推导方式同样可以得出运动载体的飞行高度为:

对于三角波调制信号,正向调制段得到的差拍信号频率可以写成:

负向调制段得到的差拍信号频率可以写成:

则目标实际得到的差拍频率为:

而由于载体运动引起的多普勒频移为:

只要我们实时测量正向调制段和负向调制段的差拍信号频率,则可以准确计算出运动载体的相对高度值,而不受其因高度变化而产生的多普勒频率的影响,同时根据公式:

还可计算出运动载体径向的速度。
故此,我们选择三角波调制信号的线性调频连续波作为高度表的测量体制。
4 其它工作参数选择与性能分析
4.1 工作频率和发射信号带宽
无线电高度表的工作频率越高,所需的收发天线尺寸越小,越有利于设备的小型化。另一方面,工作频率越高,射频器件的成本越高。
为了得到较高的高度分辨力,高度表的发射信号带宽应尽可能大。另一方面,发射信号带宽越大,要求的ADC采样率越高,必然要求系统的数字信号处理能力越强,会增加信号采集与处理部分的成本。
针对IVS948模块的主要性能指标,这里选择K波段作为工作频段,中心频点为24.125GHz,发射带宽250MHz。
4.2 调制周期
高度表安装在运动载体上,为了能够精确测量载体距离海面(地面)的瞬时高度,要求调制周期越小越好,而调制周期越小,在信号带宽一定的条件下调频斜率则越大,这给调频信号的产生带来困难,容易导致调频线性度不高,测量误差增大。
另一方面,从工作原理可以看出,高度H是B、Tm和fb的三元函数。高度表的工作范围在1m至300m之间,若选择调制周期Tm不变,则差拍频率的最大和最小值相差会达到300倍,要求差拍信号放大器的带宽足够宽,这给高空条件下信号的检测带来很大的困难。
综合考虑上述两方面,我们在不同的飞行高度段选取不同的调制周期以减小差拍信号的带宽,见表1。

表1 不同飞行高度段和调制周期对应的差拍频率Tab.1 Beat frequency corresponding to different flight height and modulation period
4.3 中频信号带宽
根据表1易知,当不存在由于载体运动而引入的多普勒频率分量时,差拍频率的最大带宽为20kHz。考虑载体的垂直飞行速度最大为100m/s,则由此引入的最大多普勒频率为:

考虑留有一定余量,取中频带宽最大为100kHz。
4.4 接收机灵敏度
接收机灵敏度计算公式为:

式中:K——波尔兹曼常数;T——工作温度;B——接收机的处理带宽;F——接收机的噪声系数;Smin——信号处理所需的信噪比。
通过对接收机的硬件设计,经测试其噪声系数F可做到5dB,Smin需达到13dB,则:

4.5 发射功率
所需的最小发射功率可通过式(17)计算:

式中:Ls——系统与传输损耗;Gt,Gr——发射和接收天线增益;λ——发射信号波长;α——散射系数;——波束宽度因子;Hmax——高度表工作的高度。
按照天线波束宽度大于10º×25º的要求,并考虑留有一定余量,取Gt=Gr=17dB,α=-13dB,θα=10∘,Ls=3dB,则所需最小发射功率为:

要求的最小等效辐射功率为:

该值小于IVS948模块的最大输出功率26dBm。
4.6 接收机信号动态范围
无线电高度表接收的是海面或地面的反射回波。在发射功率一定的条件下,接收机输入信号的功率主要取决于雷达距离海面或地面的高度。根据系统的工作高度要求,按照高度计的雷达方程,对应高度变化引起的接收信号功率变化约为49.5dB。
4.7 测高性能分析
采用线性调频连续波体制进行测高,根据其工作原理,测量误差主要由如下因素引起:
1)调制周期的不稳定性;
2)射频频率源引入的调频斜率非线性;
3)多普勒频率;
4)差拍频率的估计误差。
采用DAC方式产生调制信号,Tm的不稳定性仅与DAC的工作时钟有关,取DAC的工作时钟大于1MHz,则按照选定的最小调制周期1ms,对应的调制周期误差不到0.1%。
射频频率源引入的调频斜率非线性将影响接收机混频出来的差拍频率的准确性。为了提高测高性能,需要对射频频率源的非线性进行补偿和校正,使整个带宽内的调频非线性控制在0.5%以内。
差拍频率的估计误差主要取决于信号处理方法,频率估计误差引入的测距误差为:
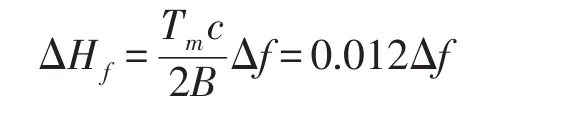
当要求ΔHf小于0.3m时,对应要求频率估计误差小于25Hz。
5 软件设计
系统软件主要完成的任务是:设备自检,设备状态输出,工作模式管理,接口管理。
系统软件的总体流程如图5所示。

图5 系统软件流程图Fig.5 System software flow chart
5.1 自检与校准模式
系统自检主要完成射频前端和基带信号产生与处理单元的自检,包括:DSP运行状态、DAC和ADC状态、射频前端的状态。
系统校准主要完成系统工作中心频率和调频斜率的校准。
系统工作的中心频率确定方法如下:由DSP从IVS948参考频率输出引脚读取被1/X分频的发射频率fmuxout,再利用分频比计算出IVS948的实际发射频率,之后再根据与设定频率之间的差值调整VCO的调谐电压,使得最终发射信号的频率与设定的频率相一致。
发射信号的调频斜率通过如下方法校准:由DSP控制DAC产生恒定电压,使IVS948在工作频段内产生不同频点的单频信号,由DSP从IVS948参考频率输出引脚读出分频频率,并计算出实际发射频率。DSP将这些实际频率与DAC输出电压的对应关系做成查找表存储到FLASH中,无线电高度表在实际发射时根据该表对DAC输出电压进行调整,以补偿VCO非线性的影响。
5.2 高度搜索模式
系统软件在高度搜索模式时采用自适应对消技术以提高收发间隔离度,并采用恒虚警(CFAR)检测,其基本工作过程如下:首先,利用ADC采集到的数据进行自适应对消后进行FFT运算[10],计算信号的功率谱;其次,在高度区间对应的范围内搜索功率谱上的最大峰值,并计算噪声本底;然后,计算最大峰值与噪声本底的比值,并与一个预先设定的门限进行比较,若连续三次超过门限,则判定搜索到目标。一旦搜索到目标即进入高度跟踪模式。
在高度搜索模式下,调整的主要参数为调制周期和搜索的频点范围。
5.3 高度跟踪模式
高度跟踪模式是无线电高度表的主要工作模式,用于实现高度测量。
由于无线电高度表在实际使用过程中所接收到的回波是不同延迟、幅度上被目标散射系数和天线方向图加权了的大量回波的合成。当海况较差或地面起伏不平、载体的飞行姿态做机动时,这时差拍频率的最小值就不一定是天线天底点的高度了。为了克服这些不利因素的影响,系统软件在高度跟踪模式下采用如下方法对ADC采集信号进行处理:
1)对ADC采集的上扫频回波信号进行FFT运算,计算功率谱;
2)将得到的功率谱与设定的门限进行比较,得到高于门限的一段频谱区域;
3)对该段区域采用CZT算法进行频谱局部细化,降低差拍信号频谱上的频率采样间隔;
4)取过门限的最低差拍频率附近有效带宽B内的频点,并对这些差频值进行加权平均,得到上扫频的平均差频值;
5)用同样的方法求得下扫频的平均差频值;
6)利用高度与差频值的对应关系和估计得到的上下扫频分别对应的差频值,计算实际高度,消除多普勒频移的影响。
在高度跟踪模式下,调整的主要参数是有效带宽和加权系数。
6 试用情况
设备样机研制完成后其外形尺寸为85mm×80mm×27mm(不计输出接口连接器),总重量约为350g,功耗约为3.7W,输出高度数据更新率为20Hz,高度输出误差不大于3.125cm,串口通信波特率为38400bps。其结构示意图如图6所示。
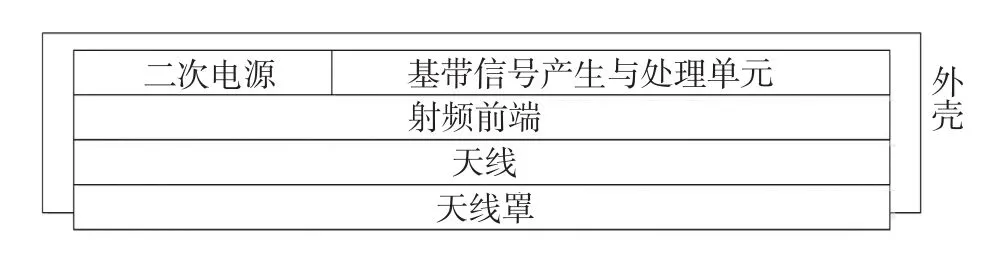
图6 设备结构示意图Fig.6 Schematic diagram of equipment structure
在经过地面静态测试和库房吊高试验后,利用国产某小型无人机结合任务飞行试验对工程样机进行了海上动态飞行测试,高度测量结果存储在机载数据采集转发盒中,该无人机爬升角为15°,下滑角为5°,转弯角为30°,基本与高度表的波束宽度相同,机上装有高精度高动态的GPS原始数据记录设备,可事后进行差分数据处理。任务结束后对无线电高度表的测量结果数据进行了提取和事后处理,并与GPS差分高度数据处理结果进行了比对,两组数据的对比曲线如图7所示。

图7 GPS差分高度与无线电高度表高度对比曲线Fig.7 Contrast curve between GPS difference height and radio altimeter height
通过对比可以看出,无线电高度表的测量结果与GPS差分高度数据在整个飞行段基本吻合,在100m高度附近测量误差在±2m以下。
7 结束语
本收发一体式无线电高度表设计紧凑、结构合理、体积小、重量轻、价格低、安装使用方便,经实际动态飞行测试,其测高误差可达±2%H以下,满足一般无人机的飞行控制要求,可推广应用于300m以下高度飞行的无人机飞行控制系统中。
[1]朱启明.无线电高度表设计理论基础[M].北京:国防工业出版社,1992.
[2]IVS-948 24GHz平面天线雷达产品手册V1.1.深圳:深圳市华儒科技有限公司,2012.
[3]汪安民,周慧,蔡湘平.TMS320C674x DSP应用开发[M].北京:北京航空航天大学出版社,2012.
[4]赵秀克.多普勒效应对调频连续波恒定差拍体制无线电高度表的影响分析[J].通信设计与应用,2016,8:22-23.
[5]毕开波,姚申茂,谢春思.无线电/激光高度表复合测高技术研究[J].舰船电子对抗,2016,39(3):19-22.
[6]丁勇,徐晶.调频连续波无线电高度表的计算机仿真[J].计算机应用,2009,29(6):317-322.
[7]杨毅,韩宇,刘建新.基于FFT的恒差拍FMCW高度表数字信号处理器设计[J].信息与电子工程,2009,7(1):48-51.
[8]杨毅.FMCW雷达高度表数字信号处理技术研究[D].北京:中国工程物理研究院,2009.
[9]席睿波.高度表差拍信号的数字检测与控制[D].西安:西安电子科技大学,2005.
[10]曾国奇,李思吟,王松等.FFT-CZT技术在单天线LFMCW无线电高度表中的应用[J].高技术通讯,2013,23(3):308-312.
猜你喜欢
发电设备(2022年3期)2022-05-23
能源工程(2021年5期)2021-11-20
北京航空航天大学学报(2021年9期)2021-11-02
电脑爱好者(2021年12期)2021-06-22
昆明医科大学学报(2021年2期)2021-03-29
天天爱科学(2020年6期)2020-09-10
科技传播(2019年24期)2019-06-15
探索科学(2017年4期)2017-05-04
哈尔滨理工大学学报(2016年2期)2016-09-12
物理教学探讨(2014年5期)2014-09-18
