
改进单神经元自适应PID锚泊点切换控制器设计
2018-05-17 08:57
福建质量管理 2018年9期
(天津工业大学 机械工程学院 天津 300387)
引言
虚拟锚泊浮标是一种结合传统锚定浮标和波浪能滑翔器的新型海上观测平台,主要包括:水面浮标、铠装缆和牵引机。目前国内外还没有关于虚拟锚泊浮标的相关文献。传统锚定浮标不能自主走航,其定位精度不高,不适用于深远海。波浪能滑翔器的研究取得初步成果,但国外对于波浪能滑翔器控制策略鲜有提及,国内研究主要是采用PID算法与其它算法相结合的导航算法[1]。
本文设计了一种改进单神经元自适应PID锚泊点切换控制器,实现了虚拟锚泊浮标在锚泊点之间的位置切换,具有较强的稳定性与鲁棒性。
一、运动模型
卢旭利用Fossen矩阵对波浪能滑翔器建立的运动模型没有考虑升沉自由度[2],而虚拟锚泊浮标由波浪能驱动,其升沉自由度必不可少。因此,建立虚拟锚泊浮标四自由度运动学和动力学模型,其运动方程组可以表示为:
(1)
其中,xi(k)、xi(k)、xi(k)分别为在大地坐标系下x、y、z方向上的位移,xi(k)为虚拟锚泊浮标航向角,xi(k)为浮标纵荡速度,xi(k)为浮标的横荡速度,xi(k)为浮标升沉速度,xi(k)为浮标艏摇角速度;m11、m22、m33、m44为质量惯性参数;d11、d22、d33、d44为水阻力(矩)参数;T1为水翼产生的纵向推力,xi(k)为波浪和重力对虚拟锚泊浮标在垂直方向上的合力,T4为尾舵产生的转向力矩,xi(k)和xi(k)为水翼和尾舵的水动力(矩)参数,xi(k)为舵角。
二、锚泊点切换控制器设计
(一)高斯大地线主题反解算法
大地主题反解是指根据已知的大地元素去求解其他大地元素的过程。本文通过GPS可以得到虚拟锚泊浮标所在坐标的经纬度,通过大地主题反解算法去求得所需的导航数据(两点之间的大地线距离和方位角)[3]。
(二)视向跟踪算法
视向跟踪算法是指只周期性的调整自身航向,以期望达到自身航向和虚拟锚泊浮标当前位置与目标锚泊点之间连线的方位角一致。具体算法过程为:在朝着目标锚泊点运动过程中,虚拟锚泊浮标每次采集到GPS点,进行重新定位并通过高斯大地线主题反解算法计算高斯大地线距离以及自身GPS点与目标锚泊点之间的方位角,判断虚拟锚泊浮标是否达到指定的锚泊点。当到达指定锚泊点误差圆范围内,进行虚拟锚泊控制,未达到指定锚泊点误差范围内,重新进行航向校正。
(三)改进单神经元PID控制器设计
单神经元自适应PID控制器是通过对加权系数的调整来实现自适应、自组织功能,权系数的调整是按有监督的Hebb学习规则实现的。在大量的实际,应用中,通过实践表明,PID参数的在线学习修正主要与e(k)和△e(k)有关。基于此可将单神经元自适应PID控制算法中的加权系数学习修正部分进行修改,即将其中的xi(k)改为e(k)+Δe(k)。
(四)锚泊点切换控制设计
锚泊点切换控制是指虚拟锚泊浮标为了执行新任务从一个锚泊点到另一个锚泊点进行位置切换的控制,主要功能是进行短距离锚泊点之间位置切换。具体可以描述为:通过GPS获得当前位置信息,通过罗盘采集虚拟锚泊浮标当前航向角。当前位置信息通过高斯大地主题反解视向跟踪算法计算出到下一个锚泊点的距离与期望航向角,期望航向与当前航向会存在一定的偏差,即航向差。控制系统检测到该差值后,采用改进单神经元自适应PID算法计算出恢复到期望航向所需的舵机转角的变化量,即舵角增量。当舵角增量在[-5°,5°]范围内时,控制系统不对虚拟锚泊浮标的舵机执行任何动作,称之为放空,这是一种放空节能策略。当舵角增量大于5°或小于-5°时,根据当前舵角算出打舵角度,虚拟锚泊浮标执行打舵动作。执行打舵动作之后,虚拟锚泊浮标航行轨迹就会朝期望航向偏移。此时,再通过GPS和罗盘采集当前位置信息和当前航向,与预设锚泊点信息和期望航向进行对比判断,如果到达预设锚泊点,停止锚泊点切换算法,没有达到,重复之前的控制、执行和再判断过程。
三、仿真分析
以虚拟锚泊浮标样机为对象,在三级海况(波高1m,周期4s)下,分别利用改进单神经元自适应PID锚泊点切换控制器与增量式PID锚泊点切换控制器进行仿真实验。
设置锚泊点1坐标为(0,0)和锚泊点2坐标为(60,60),虚拟锚泊浮标初始艏摇角设定为0°。两次仿真过程中,虚拟锚泊浮标视向跟踪轨迹变化如图1所示,航向变化如图2所示。
从图1、图2中可以看出改进单神经元PID控制器比增量式PID控制器具有更强的调节能力。

图1 虚拟锚泊浮标轨迹变化
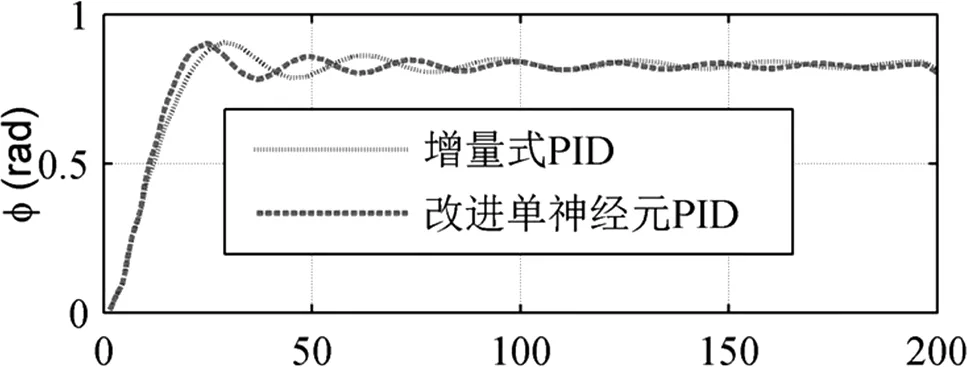
图2 虚拟锚泊浮标航向变化
四、结语
本文利用Fossen矩阵建立了虚拟锚泊浮标四自由度运动模型,通过高斯大地主题反解视向跟踪算法得出期望导航数据,采用改进单神经元自适应PID控制器,实现了虚拟锚泊浮标在锚泊点之间进行位置切换的控制。通过仿真分析,结果表明所提出的控制器具有很好的锚泊点切换功能。
【参考文献】
[1]廖煜雷,李晔,刘涛,等.波浪滑翔器技术的回顾与展望[J].哈尔滨工程大学学报,2016,37(9):1227-1236.
[2]卢旭.波浪滑翔器总体技术研究[D].哈尔滨:哈尔滨工程大学,2015.
[3]赵长胜.高斯平均引数计算大地坐标主题反解的迭代算法[J].测绘通报,2004,(10):11-12.
猜你喜欢
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
军民两用技术与产品(2021年7期)2021-10-13
舰船电子工程(2021年5期)2021-06-04
北京航空航天大学学报(2020年3期)2021-01-14
垂钓(2019年2期)2019-09-10
小学时代(2017年16期)2017-06-19
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
百科探秘·航空航天(2015年10期)2015-11-07
船舶力学(2014年5期)2014-01-19
