无人机覆盖搜索地域通信网交叉式航路规划
2018-05-18 00:53许阳明
电光与控制 2018年5期
郑 超, 许阳明
(国防科技大学电子对抗学院,合肥 230037)
0 引言
地域通信网是由栅格状干线节点和传输系统组成的覆盖战术战役区域的栅格状通信系统,包括干线节点、大小入口节点、无线用户入口节点以及移动用户车辆等[1]。干线节点间通过微波接力机设备相连组成栅格状网络,实现一定地域的通信网络覆盖,且节点间距离一般在20 km左右。节点波束具有方向性强以及波束窄的特点,这使得干线节点不易被侦察到。近年来,无人机在战场中发挥着越来越重要的作用。在军事上,电子对抗无人机因体积小、造价低、无人员伤亡、机动性强等特点,主要用于执行侦察、监视、通信中继、电子对抗、战果评估等任务。文献[2]提出在无人机平台上通过对地域通信网节点信号的侦察、测向和辐射源定位等手段,获取地域通信网信息的方法。然而目前的文献只研究了利用无人机侦察地域通信网的有效性与可行性,并没有得到利用无人机侦察地域通信网的具体方法。
由于地域通信网各个干线节点在待侦察区域中的位置以及节点间的通信链路往往是未知的,可以利用无人机对地域通信网部署区域覆盖搜索来得到这些信息。无人机区域覆盖路径规划(Coverage Flight Path Planning,CFPP)定义为:在满足某种(某些)性能指标最优的前提下,避开障碍物和威胁源,规划出一条传感器探测区域遍历待覆盖区域的最优路线[3-4]。
因此本文提出一种利用无人机以纵横交叉的航路实现对地域通信网部署区域覆盖搜索的方法,保证无人机能侦察到区域内任意位置的干线节点以及节点间所有通信链路,有效提高了任务执行效率。
1 无人机侦察干线节点模型确定
不同于普通的光学侦察,地域通信网干线节点天线波束窄、增益高的特点,使无人机对干线节点的侦察搜索必须满足严格的空域条件,满足空域条件是指无人机必须飞入干线节点定向天线波束覆盖的区域。
地域通信网干线节点天线是定向的,如图1所示。图中:h为无人机飞行高度;P1,P2分别为到达盲区侦察距离时与最大侦察距离时的无人机位置。

图1 侦察距离示意图Fig.1 Distance of reconnaissance
无人机处于干线节点天线的波束轴向方位:当无人机与干线节点小于某个距离时,由于俯仰角过大,无人机无法侦察到节点天线辐射的信号,称该距离为盲区侦察距离Dmin;当无人机与干线节点距离过大时,会产生严重的信号衰减,当距离大于一定值,无人机无法侦察到节点天线辐射的信号,称该距离为最大侦察距离Dmax。无人机机载侦察设备侦察区域投影到地面后的模型如图2a所示。
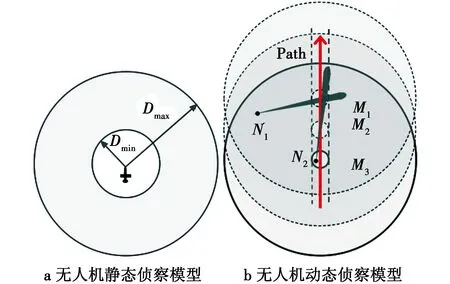
图2 无人机侦察模型Fig.2 Reconnaissance model of UAV
以无人机为圆心,在半径为Dmin的圆内的干线节点,无论波束指向何处都无法被侦察到,该区域称为侦察盲区;在距离圆心Dmin至Dmax的圆环内的干线节点,当波束指向圆心时节点可被侦察到,该区域称为有效侦察区域。
对于时刻运动的无人机来说,其侦察区域的圆心一直改变,圆心产生的轨迹即无人机的飞行航路Path,如图2b中红色带箭头实线所示。图中,节点N1的波束与无人机航路交于一点M1,表示当无人机位于点M1时,干线节点N1的波束正好指向无人机(满足空域条件),若节点N1至交点M1的距离d1大于盲区侦察距离Dmin且小于最大侦察距离Dmax(满足能量域条件),节点N1能被沿航路Path飞行的无人机侦察到。
因此对于运动的无人机来说,只要其航路穿过节点波束,且满足侦察距离条件,节点就能被侦察到。
在飞行的过程中,无人机的侦察盲区一直随其位置的改变而改变,某个时刻的侦察盲区可能在下个时刻可能不再是侦察盲区而是有效侦察区域。称图2b中两条虚线之间宽度为2Dmin的区域为似侦察盲区,似侦察盲区由时刻移动的侦察盲区叠加而成,称两条虚线为似盲区边界线。如当无人机位于M3位置时,节点N2处于无人机侦察盲区内,无法被侦察到;而当无人机飞行至M2位置时,节点N2处于无人机侦察盲区外,可被侦察到,因此似侦察盲区可被视为有效侦察区域来研究。
2 以交叉式航路覆盖搜索地域通信网的航路规划方法
假设地域通信网干线节点在待侦察区域内各个位置存在的概率是均匀分布的,节点波束指向也是均匀分布的。当无人机航路以合适的间隔距离l“包围”具有定向天线波束的干线节点时,无论干线节点波束指向何处都能被无人机侦察到。当纵向扫描线间隔与横向扫描线间隔大小相等时,无人机航路所围区域范围最大,重复侦察区域最小,侦察效率最高。本文提出的无人机以交叉航路覆盖搜索地域通信网的方法是指无人机通过纵横两个相互垂直的交叉航路,能保证搜索到待侦察区域内每一个干线节点的方法。
分别讨论能保证无人机对待侦察区域内节点的完全覆盖搜索的交叉航路,以及对航路的优化方法。
2.1 覆盖搜索策略
给定一个有界的封闭待侦察区域E,规模为L×W[5],其中,L为无人机横向搜索路径长度,W为无人机纵向搜索路径长度。如图3中蓝色实线框所示,未知的地域通信网部署在该区域内。以区域左下角顶点A为原点,左边界AB为Y轴,下边界AD为X轴建立平面直角坐标系。为了使航路“包围”待侦察区域,无人机的初始航路在待侦察区域外侧,设无人机起始位置为点-Dmin,-Dmin。红色实线表示无人机航路,搜索过程如图3所示[6-7]。
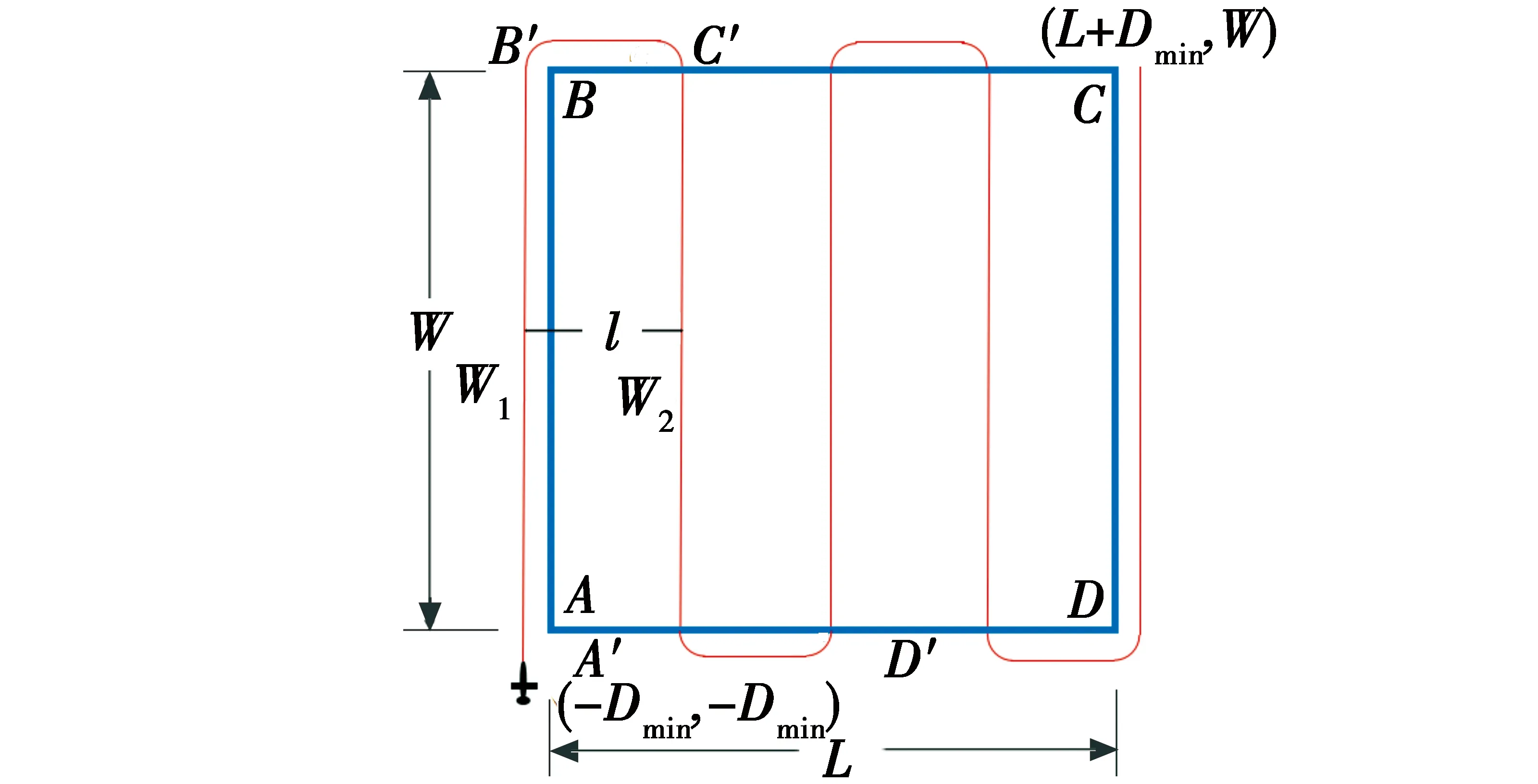
图3 纵向搜索Fig.3 Vertical search
用以下6个步骤描述无人机完成对地域通信网覆盖搜索的交叉航路。
1) 如图3所示,无人机从起始位置(-Dmin,-Dmin)开始起飞,速度方向竖直向上。
2) 无人机到达待侦察区域的上边界BC延长线上的B′后,进行右转弯—直线—右转弯飞行,到达上边界BC上的C′,无人机的飞行航路为W1→B′C′。
3) 无人机到达待侦察区域的下边界AD上的A′后,进行左转弯—直线—左转弯飞行,到达下边界AD上的D′,无人机的飞行航路为W2→A′D′。重复步骤1)~3),直到无人机完成对整个区域的纵向搜索,到达点(L+Dmin,W)。
4) 如图4所示,无人机完成对整个区域的纵向搜索后,在点(L+Dmin,W)左转π/2进行纵横搜索转换,从位置(L+Dmin,W+Dmin)开始横向飞行,速度方向水平向左。
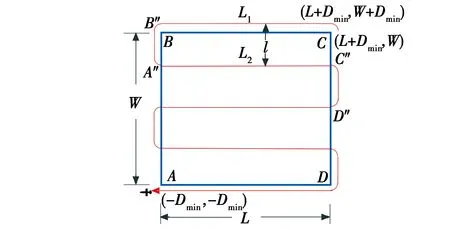
图4 横向搜索Fig.4 Horizontal search
5) 无人机到达待侦察区域的左边界AB延长线上的B″后,进行左转弯—直线—左转弯飞行,到达左边界AB上的A″,无人机的飞行航路为L1→B″A″。
6) 无人机到达待侦察区域的右边界CD上的C″后,进行右转弯—直线—右转弯飞行,到达右边界CD上的D″,无人机的飞行航路为L2→C″D″。重复步骤4)~6),直到无人机完成对整个区域的横向搜索,到达起始位置(-Dmin,-Dmin)后结束任务。
合并纵横2条航路,得到交叉扫描线式覆盖搜索航路如图5所示。
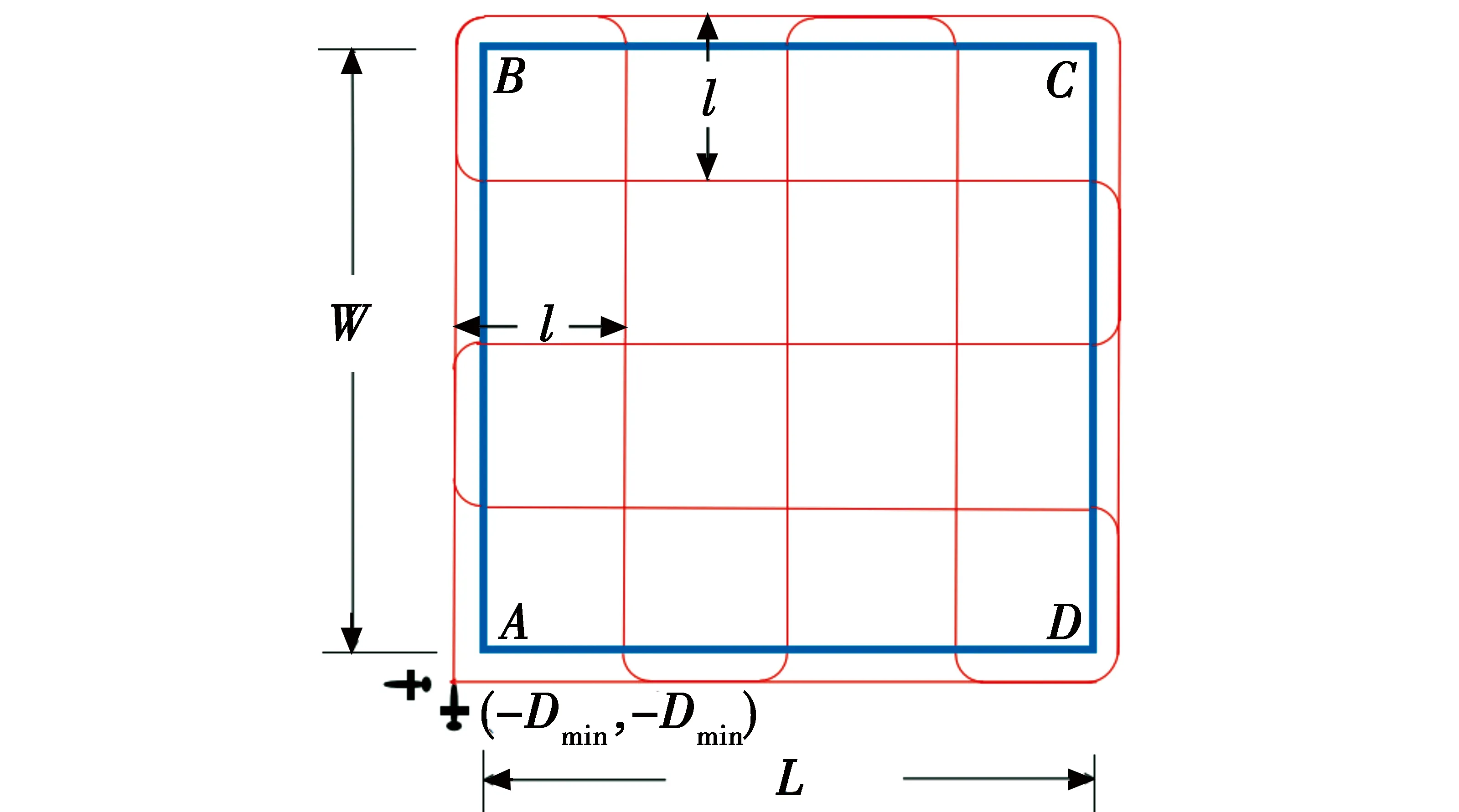
图5 交叉航路覆盖搜索路径Fig.5 Crossed path of UAV
2.2 扫描线间隔距离的确定
取在待侦察区域内两两垂直的4条航路为例进行分析,如图6所示。

图6 节点位于似侦察盲区外Fig.6 The node is outside the blind zone
图中:红色实线表示无人机航路,间隔为l;航路两侧的黑色虚线表示似盲区边界线;黑色圆点表示无人机位置;长条状灰色部分表示无人机天线波束。下面根据节点可能存在的位置讨论确定航路间隔l的大小。
1) 节点位于似侦察盲区外,即节点位于图中正方形框内,当节点波束方向为对角线方向时,节点到航路的距离最远,如图6所示,当该距离小于无人机最大侦察距离,即
(1)

2)节点位于似侦察盲区内,由于无人机始终在飞行侦察,视似侦察盲区为有效侦察区域。如图7所示,节点波束方向为对角线方向时,节点到航路的距离最远,该距离小于无人机最大侦察距离,即
(2)
而此时节点与邻近航路有交点,且到交点的距离大于盲区侦察距离Dmin。节点被多次侦察到,使得侦察效能降低。
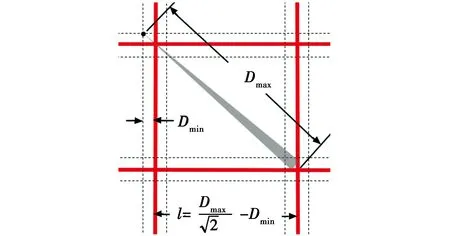
图7 节点位于似侦察盲区内Fig.7 The node is inside the blind zone
3)同时考虑节点到邻近航路距离最小的情况,图8中空心圆表示无人机位于纵横航路交点处时的侦察盲区,节点位于以纵横航路交点为圆心的侦察盲区的边界线上,且波束指向为对角线方向。当无人机在邻近航路上时,该节点无法被侦察到,而当无人机在其他航路上时,节点能被侦察到。节点到航路的距离小于最大侦察距离,即
(3)


图8 航路间隔的确定Fig.8 Gap between flight paths
2.3 调头转弯路径优化
为了使航路能够“包围”每一处的节点,且受到最小转弯半径的约束,无人机需要在待侦察区域外部进行转弯调头。无人机在结束一次纵(横)向搜索后需要调头进行下一次纵(横)向搜索,称无人机结束一次纵(横)向搜索飞离搜索区域的点为飞出点Z1,调头后进入搜索区域的点为飞入点Z2。无人机飞出区域边界后,要以最短的路径长度回到待侦察区域内执行侦察搜索任务,即求飞出点与飞入点之间的最短路径长度。
如图9所示,当无人机结束一次纵向搜索,在点Z1飞离区域边界时开始转弯,为了不遗漏任意位置的节点,取转弯半径R为Dmin[8]。由计算得到盲区侦察距离一般大于最小转弯半径,满足无人机机动性能要求。

图9 转弯点的确定Fig.9 Turning point
扫描线间隔l>2Dmin,为使无人机由点Z2垂直进入预定航路,无人机在右转π/4后继续往前水平飞行l-2Dmin,再右转π/4由点Z2进入待侦察区域执行侦察搜索任务,称这样的转弯方式为常规半圆转弯。图9中,蓝色实线表示区域边界;黑色虚线表示无人机的似盲区边界线;红色实线表示无人机实际航路。每一个转弯圆弧的路径长度为πDmin/2,完成整个调头的路径,即图9中粗实线部分长度为
(4)
无人机在进行纵横航路改变时,可能转过π/2也可能转过3π/2,因此转弯路径长度为SX=πDmin/2或SX=3πDmin/2。
2.4 剩余宽度分析
无人机结束在待侦察区域内部的搜索后,为了“包围”待侦察区域,需要沿区域边界外Dmin处的预定航路飞行,称无人机在区域内部最后一次搜索的航路到区域边界外Dmin处的预定航路的距离为剩余宽度Lleft。当剩余宽度Lleft不足l时,需要根据剩余宽度Lleft的大小讨论无人机以何种方式调头转弯才能保证转弯后沿外侧预定航路飞行。
1) 当Lleft≥2Dmin时,如图10所示。
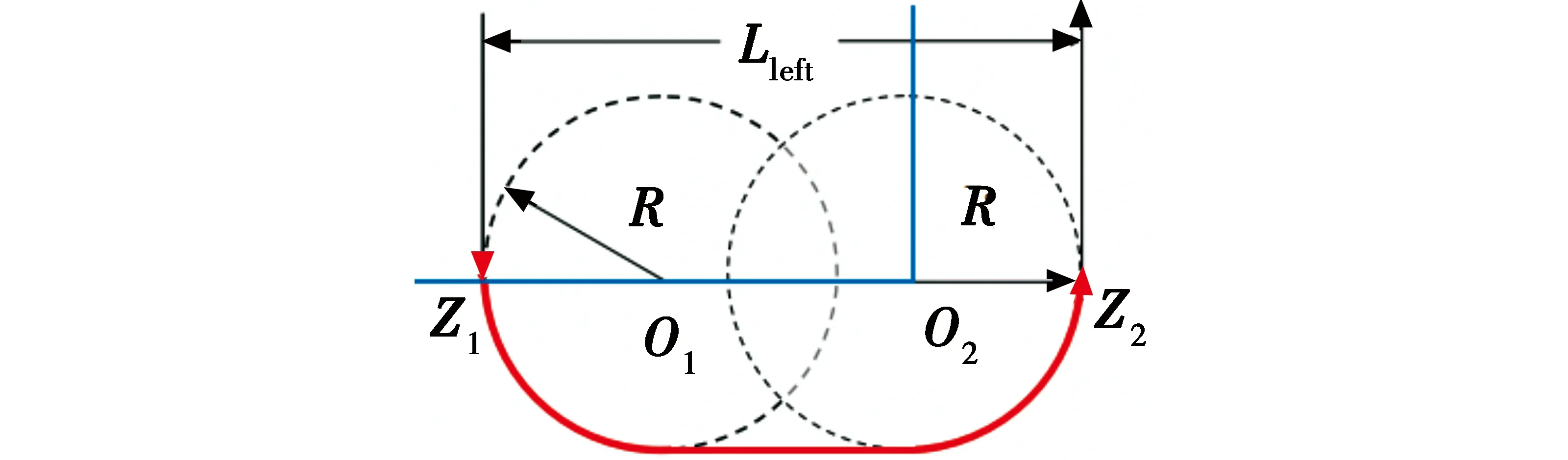
图10 Lleft≥2Dmin时的转弯路径Fig.10 Turning path when Lleft≥2Dmin
图中:蓝色实线表示区域边界,与常规半圆转弯方式类似,无人机由点Z1飞出后先转π/4再往前水平飞行Lleft-2Dmin距离,后转π/4进入预定航路继续执行侦察搜索任务,称这样的转弯方式为Ω形边界转弯[9];红色实线部分为转弯路径,长度为
SΩ=Lleft+(π-2)Dmin。
(5)
2) 当Lleft<2Dmin,如图11所示。
为保证无人机由点Z2水平进入预定航路,如图11a所示,无人机由点Z1飞出,先沿圆弧右转φ,再左转φ+π,最后直线飞行2Rsinφ由点Z2水平进入待侦察区域继续执行侦察搜索任务;或如图11b所示,无人机由点Z1飞出后先直线飞行2Rsinφ,再沿圆弧左转φ+π,最后右转弯φ由点Z2水平进入待侦察区域继续执行侦察搜索任务,称这样的转弯方式为η形边界转弯,转弯路径长度为Lη。其中φ=arccos(Lleft/2Dmin)。红色实线部分为转弯路径,长度为
(6)
设完成整个交叉航路的覆盖搜索任务共需要进行横向搜索次数为nL、纵向搜索次数为nW,常规半圆转弯次数为nr,η形边界转弯次数为nη,Ω形边界转弯次数为nΩ,纵横航路改变次数为1,因此可得到无人机侦察完整个任务区域的总航程为
Stotal=nLL+nWW+nrSr+nΩSΩ+nηSη+SX。
(7)
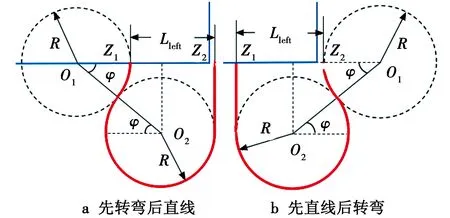
图11 当Lleft<2Dmin时的转弯路径Fig.11 Turning path when Lleft<2Dmin
3 实例仿真分析
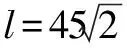
由仿真结果可以看到,无人机从起点(-2 km,-2 km)开始搜索,对该区域的交叉搜索共有5次纵向搜索与5次横向搜索,即nW=5,nL=5,常规半圆转弯次数nr=6,η形边界转弯次数为nη=0,Ω形边界转弯次数nΩ=2,纵横航路改变次数为1,即nL=5,nW=5,nr=6,nη=0,nΩ=2,L=200 km,W=200 km,Sr=65.9 km,SΩ=13.4 km,SX=π km,因此无人机交叉航路的总航程为Stotal=2 425.4 km,并得到由相邻航路围成的封闭区域内航路点的距离最大不超过最大侦察距离,表明该区域内的节点都能被无人机侦察到,因此无人机通过交叉式的航路侦察地域通信网,能保证搜索得到待侦察区域内所有干线节点。
图12 无人机以交叉式航路覆盖搜索地域通信网仿真Fig.12 Simulation diagram of flight path
4 结论
本文通过研究无人机侦察地域通信网干线节点时产生的盲区侦察距离以及最大侦察距离,建立了无人机侦察模型,提出了无人机以交叉航路覆盖搜索地域通信网的方法,可有效搜索得到待侦察区域内的所有干线节点,提高了任务的执行效率。
参 考 文 献
[1] 柯宏发,郝光宇,葛海龙,等.地域通信网的干扰技术研究[J].电子对抗技术,2004,19(3):40-46.
[2] 韩成中,夏飞海,徐龙海,等.无人机平台下对地域通信网的情报获取技术[J].通信对抗,2012,31(1):20-24.
[3] 王文旭,李立,李俨.无人机覆盖航迹规划中子区域合并方法设计[J].电子设计工程,2015,23(11):115-118.
[4] 陈海,何开锋,钱炜祺.多无人机协同覆盖路径规划[J].航空学报,2016,37(3):928-935.
[5] 龙国庆,祝小平,董世友.多UAV协同区域覆盖侦察方法[J].火力与指挥控制,2011,36(10):49-52.
[6] 王勋,姚佩阳,梅权.多无人机协同运动目标搜索问题研究[J].电光与控制,2016,23(8):18-22.
[7] 轩永波,黄长强,吴文超,等.运动目标的多无人机编队覆盖搜索决策[J].系统工程与电子技术,2013,35(3):539-544.
[8] 于驷男,周锐,夏洁,等.多无人机协同搜索区域分割与覆盖[J].北京航空航天大学学报,2015,41(1):167-173.
[9] 万明,代忠,褚文奎.无人机扫描线区域覆盖中的转弯航迹规划[J].系统工程与电子技术,2014,36(9):1750-1754.
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
电子制作(2019年24期)2019-02-23
铁道通信信号(2018年12期)2019-01-31
铁道通信信号(2018年11期)2019-01-19
通信电源技术(2018年5期)2018-08-23
资源再生(2017年4期)2017-06-15
哈尔滨商业大学学报(自然科学版)(2016年4期)2016-09-02
通信电源技术(2016年3期)2016-03-26
海军航空大学学报(2015年3期)2015-11-11
中学历史教学(2015年11期)2015-11-11