基于CCD技术的直升机旋翼共锥度测量方法研究
2018-05-22 01:55刘伟满君丰
数码设计 2018年1期
刘伟*,满君丰
基于CCD技术的直升机旋翼共锥度测量方法研究
刘伟*,满君丰
(湖南工业大学计算机学院,湖南株洲,412000)
直升机旋翼共锥度值是旋翼动平衡测量的一个主要指标, 它直接关系到直升机的安全和其它各项重要性能的优劣。当在实际测量中,测量图片包含其他物体时,无法计算旋翼的共锥度值,如何解决物体的识别分类是旋翼共锥度测量方法的关键问题。本文以CCD成像技术为基础,提出了提取图像形状特征,并采用BP神经网络对物体进行识别分类后,再计算旋翼共锥度的方法,并通过实例证实了该方法的正确性。
直升机;CCD成像;BP神经网络;旋翼共锥度
引言
直升机旋翼是直升机的重要构成,是为直升机飞行产生升力和操纵力的直升机核心部件,直接关系到直升机的安全和其它各项重要性能。直升机旋翼的高度不一致性,会直接影响直升机的飞行性能和振动性能,在高速飞行中尤为明显,直升机在这种情况下长期工作最终会造成机毁人亡的严重事故。因此在直升机在日常的检查与维护中,需要对直升机的旋翼共锥度进行测量。目前我国主要使用的直升机旋翼共锥度测量方法包括标杆法[1]、频闪仪法[3]、通用轨迹设备测量法[4]和CCD成像法[5]。上述方法中,标杆法一种最原始的测量方法,这种方法原理简单,但只能在地面开车时测量,在测量时需要地面和空勤人员相互协作,具有一定的危险性,测量精度低。频闪仪法操作简单,主要是靠人眼观察进行主观判断,具有一定的主观性。通用轨迹设备测量法利用了透镜成像原理,这种方法在实际测量中必然受到光强和光照的影响。而CCD成像法都是在试验环境下模拟进行,没有考虑到实际的测量情况,当出现除桨叶的其它物体在图片中时,就会影响该次共锥度值测量值,需要重新采集图片数据。
本文提出的基于CCD成像技术的旋翼共锥度测量系统,针对实际测量过程中,出现拍摄图片中存在除了桨叶以外的物体时,通过提取不同物体的形状特征值,经过训练后的BP神经网络,实现对物体的识别和分类,再通过找到桨叶桨尖在图片中的位置,经过成像原理的计算,得出桨叶的实际高度差,即旋翼共锥度值。本文提出的CCD成像技术方法,能够有效的解决旋翼共锥度测量中的非正常情况,提高了系统的适应性。
1 测量方法及关键算法
1.1 测量方法
CCD成像技术共锥度测量原理如图1所示。
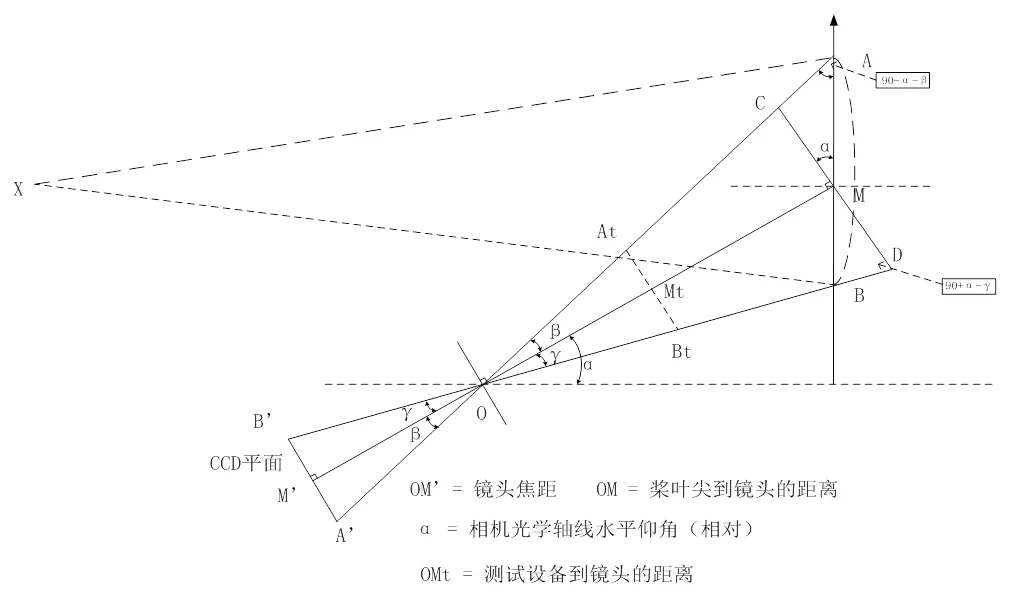
图1 CCD成像技术测量共锥度原理
设A’点距离图像水平中心线的垂直像素数为N1,B’点距离图像水平中心线的垂直像素数为N2。A、B和M点的纵坐标分别为ha,hb和0。以下的推导过程就是为了推导出N1与AM的对应关系,N2与MB之间的对应关系,这样就可以得到A’B’之间的像素数与实际物体高度差AB(ha-hb)之间的数学关系。
(1)当图像点位于图像上半部分时
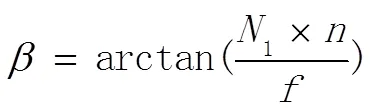
在图1中,令图像上A点成像A’点成像距离图像中心的像素数为N1,每个像素点的实际物理尺寸为n,焦距为f,在三角形A’M’O中,有
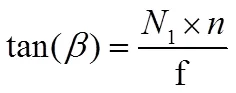
则有
在三角形AOM中,应用正弦定理有,

其中,OM的长度和安装俯仰角α的大小可由实际安装位置确定。则ha
由式(2)、(4)即可得出,A点成像点A’距离图像中心的像素数N1与A点距离参考点M的实际高度差AM的映射的关系。
(2)当图像点位于图像下半部分时,在三角形B’M’O中,
则有
在三角形AOM中,应用正弦定理有,

则hb

由式(6)、(8)即可得出,B点成像点B’距离图像中心的像素数N2与B点距离参考点M的实际高度差MB的高度差的对应关系。
由以上推导可知,N1,N2与物体实际高度为AB,即(ha-hb)之间的相互映射关系。
1.2 图像的分割
旋翼桨叶共锥度测量所拍摄的图像为灰度图像,根据图像的物体和背景有明显的灰度差别的特点,采用基于阈值的图像分割算法,而阈值的选择则由采用直方图双峰法确定。
分割算法如下:
(1)提取旋翼灰度图像的灰度直方图T;
(2)从灰度直方图中提取图像中像素点个数最多的两个灰度值H1,H2,即灰度直方图的两个双峰;
(3)寻找这两个双峰之间的像素点个数排在最后15位的灰度值;
(4)取这15个灰度值的中间灰度值作为图像的阈值进行图像分割。
1.3 物体图像区域提取
旋翼拍摄图像经过二值化处理后,需要对目标物体区域图像进行提取,提取过程如下:
(1)消除二值图像的区域面积S<30个像素点的连通域,连通域内像素点值用0代替;
(2)在剩下的连通域中,找到连通域比较密集的区域在图像所处的位置;
(3)从连通域密集区域所处位置的图像边缘开始,找到第一个连通域,记录这个连通域的位置坐标,从该坐标位置开始,往图像的内部进行扩张,找到另一个连通域,则把连通域的坐标位置更新为该连通域的位置坐标;
(4)一直寻找到从坐标位置扩张100个像素点都没有其它连通域或者找到的下一个连通域面积S>300的时候停止,则确定是目标物体区域,并提取目标物体区域。
1.4 图像形状特征提取
图像形状特征提取采用Hu不变矩描述法[10]。Hu提出了7个具有平移、旋转和缩放不变性的矩不变量。其表示为:





2 系统设计
共锥度测量系统主要由共锥度测量部件、共锥度测量控制盒、数据管理计算机和地面处理设备组成。在旋翼的中心转轴设置一个红外传感器,在直升机旋翼桨叶中选定一片基准桨叶,在基准桨叶的桨根处,贴上反光片,用于反射旋翼方位角转速传感器发射的红外光。在基准旋翼桨叶旋转到传感器的位置时,会产生旋翼基准桨叶的方位角脉冲信号,倍频电路根据桨叶的片数,将方位角脉冲进行倍频,产生每片桨叶的同步拍摄信号相机接收到拍摄信号,触发相机对旋翼桨叶进行拍照,并将数据发送给数据管理计算机进行存储。地面处理系统通过分析快取硬盘的数据,确定旋翼桨叶的共锥度。共锥度测量系统的组成如下图2所示。
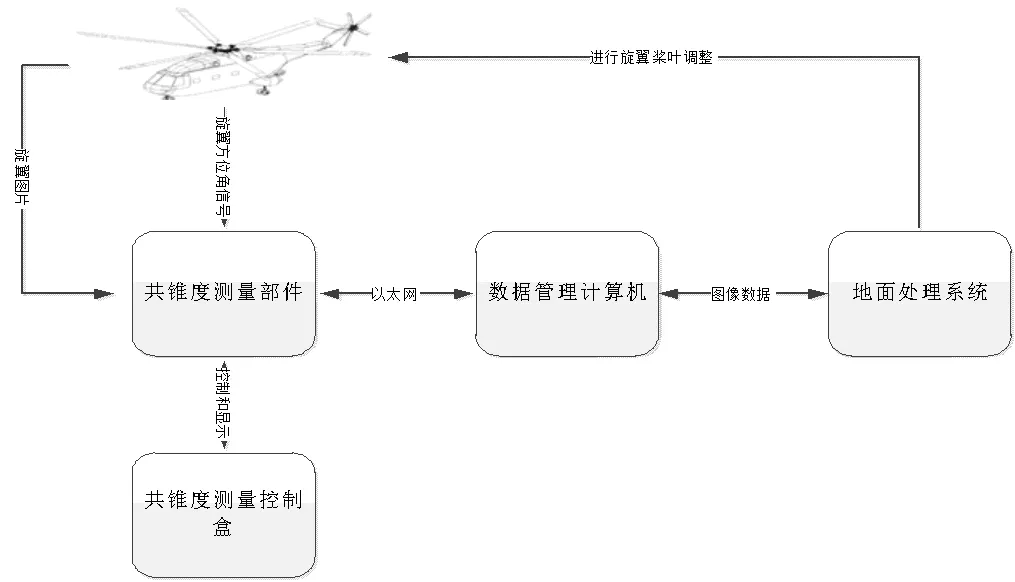
图2 共锥度测量系统组成图
3 实验结果
旋翼共锥度测量系统在某机型的安装位置示意图如图3所示。系统安装于驾驶舱的上端。桨叶的片数为3片,每片桨叶采集6张图片。CCD上每个像素的实际物理尺寸为0.83um,镜头的焦距为16mm。

图3 系统安装示意图
下面一组图是旋翼共锥度测量时所拍摄的图片。共锥度测量中的第一片桨叶(基准桨叶)的6张图片:
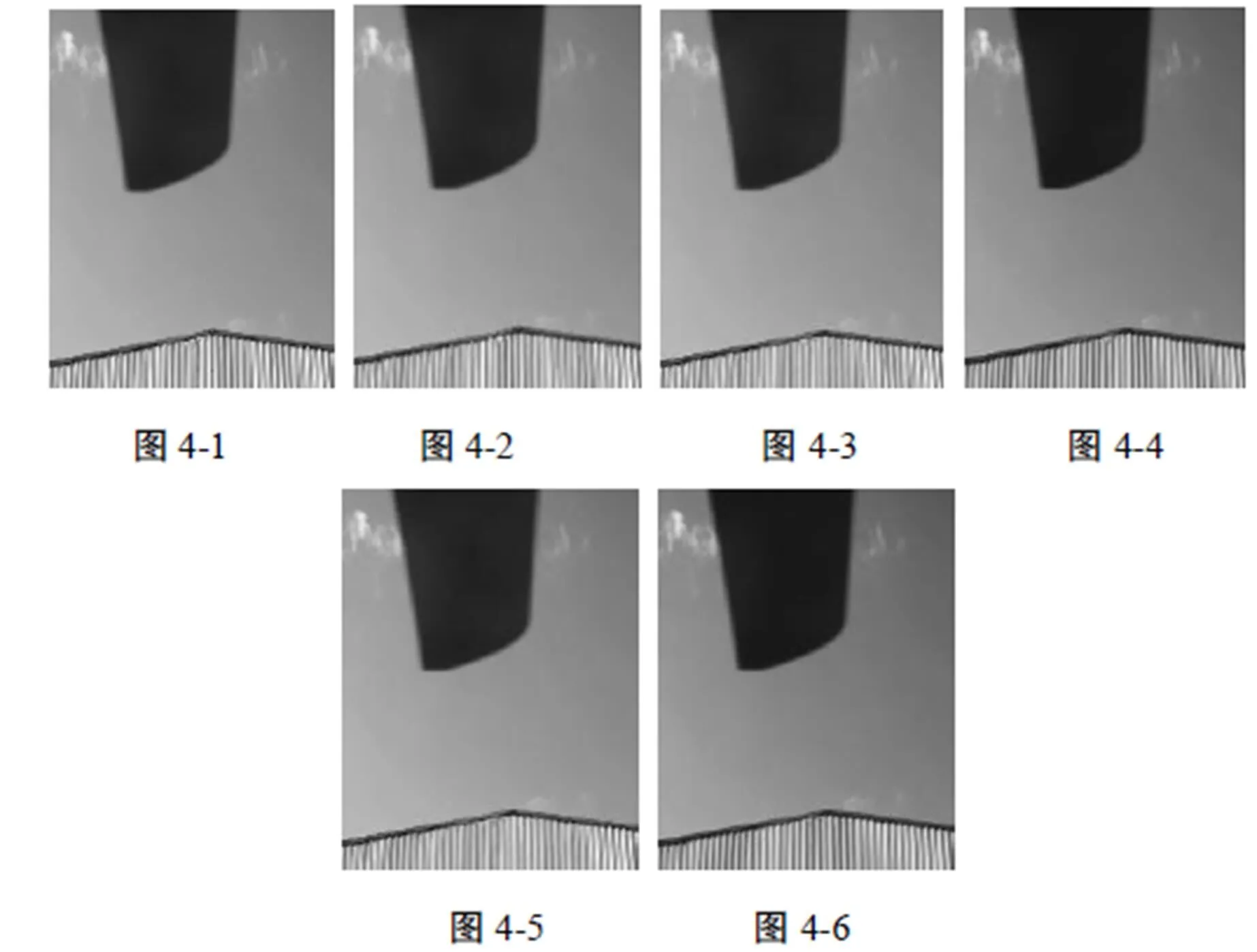
第二片桨叶的6张图片:
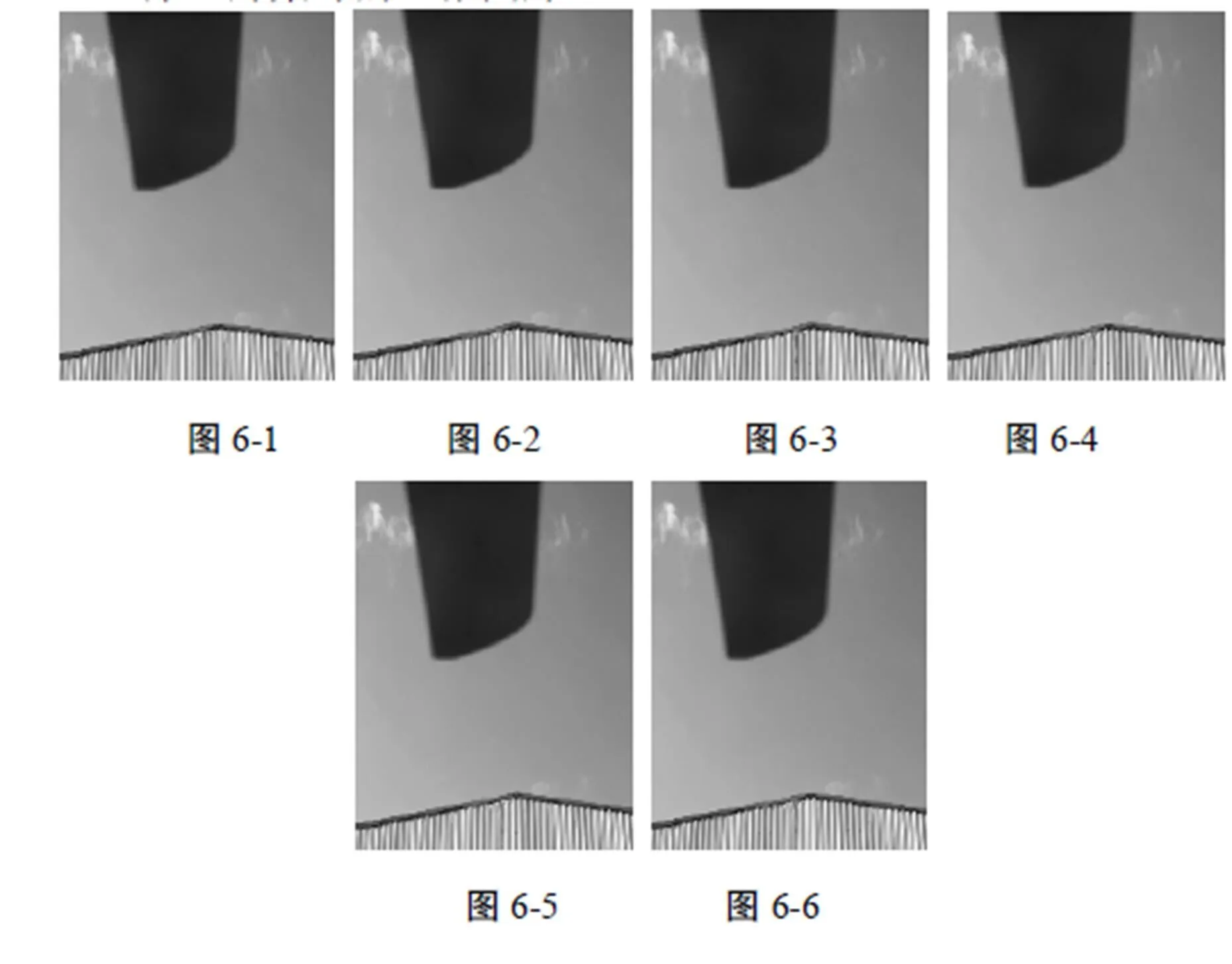
第三片桨叶的6张图片:
以图4-1位例,图7是旋翼图像分割后的图,图8是旋翼图像提取出来的桨叶分割图,图9是提取出来的机库外表分割图。
3.1 图像形状特征提取
分别计算出图7和图8的Hu不变矩。如表1所示。
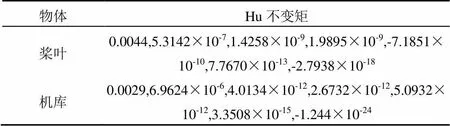
表1 目标物体不变矩
3.2 图像物体识别与分类
设神经网络的输出矩阵为Y,分类目标为5类,n为样本的类别;对应于每一个样本设定一个一维矢量对应其输出。如第5个测试样本为第2类,则输出矩阵Y的第5列的第2个元素值为1,其余都为0,即输出矩阵Y5=[0,1,0,0,0]T。
设置神经网络的目标差为0.01,最大迭代次数为500次,学习率为0.01,训练结果如图10所示。
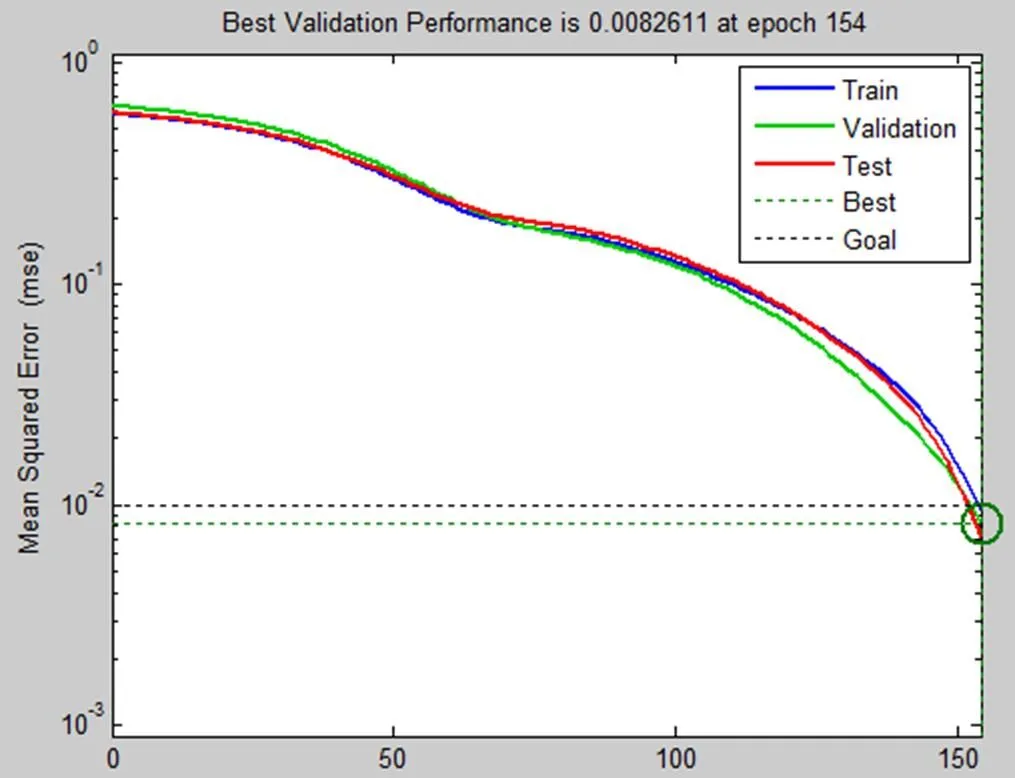
图10 神经网络训练图
由图10可知,在经过154次训练,网络已经达到最小训练误差0.00826。
通过训练后的神经网络对4-1~图6-6的物体进行识别。
3.3 旋翼共锥度测量
通过对旋翼桨叶的识别后,可以确定旋翼桨叶的具体坐标信息,其旋翼桨叶的桨尖位置如下表2所示:
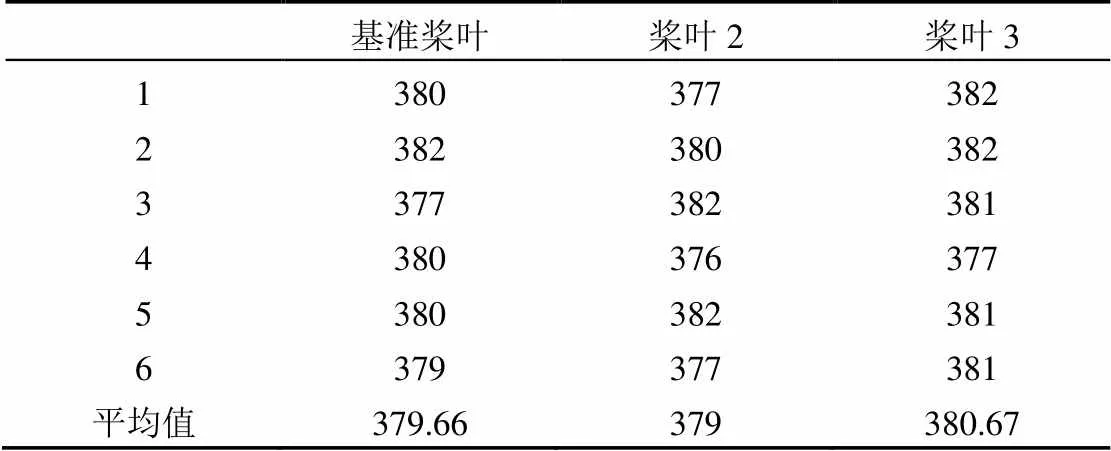
表2 旋翼桨叶桨尖位置
设基准桨叶1的高度为h1,桨叶2的高度为h2,桨叶3的高度为h3,通过测量得出OM=4116mm,α=30.601°。根据图1的成像原理,以及公式(4)和公式(8)得出各个桨叶在212转时的高度如下表3所示。
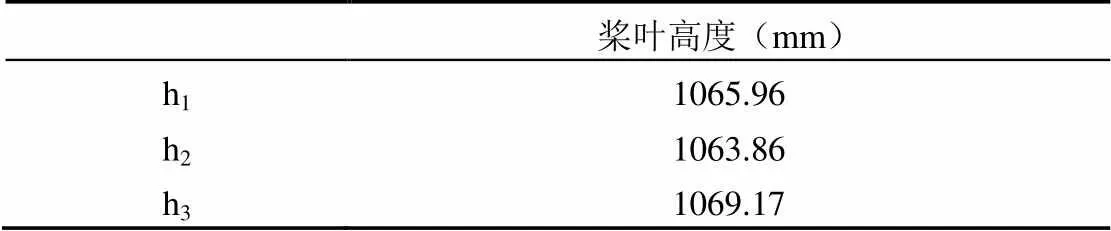
表3 计算桨叶高度
表4给出了旋翼高度差(即桨叶的共锥度值)为:

表4 旋翼桨叶高度差
4 结束语
本文基于CCD成像技术实现旋翼桨叶共锥度测量系统,提取图像中的目标物体的形状特征,通过BP神经网络实现物体的识别分类,再通过桨叶桨尖的位置,计算旋翼各个桨叶的高度差,即旋翼桨叶的共锥度值。该系统提高了容错性与准确性,能够更好的实现帮助维护人员对旋翼桨叶进行高度调整,以使得直升机保持良好的状态。
[1] 贾刚. 共锥度测量试验装置设计与实现[D]. 哈尔滨工程大学, 2009.
[2] 秀玲玲. 图像分割算法研究及实现[D]. 武汉: 武汉理工大学, 2009, 04.
[3] 魏荣俊, 吴卫东, 郑立新. 基于图像处理的直升机旋翼椎体轨迹检测系统[J]. 直升机技术, 2006, 147(3): 26-28.
[4] 李新民, 彭海鑫, 黄建萍, 等. 利用通用轨迹设备(UTD)测量旋翼椎体[J]. 直升机技术, 2007, 149(1): 50-54.
[5] 姜迈. 基于CCD技术的旋翼共锥度测量系统设计与实现[D]. 哈尔滨工程大学, 2009.
[6] 姜迈, 蔡成涛, 邓超, 等. 基于全景视觉技术的旋翼共锥度测量系统的设计及实现[J]. 吉林大学学报(工学版), 2012, 42(1): 193-198.
[7] 翟俊海, 赵文秀, 王熙照. 图像特征提取研究[J]. 河北大学学报(自然科学版), 2009, 29(1): 106-112.
[8] 刘天舒. BP神经网络的改进研究及应用[D]. 哈尔滨: 东北农业大学, 2011, 06.
[9] 陶剑峰. 基于多特征融合的行人检测方法研究[D]. 南京: 南京理工大学, 2013, 03.
[10] 黄志开. 彩色图像特征提取与植物分类研究[D]. 合肥: 中国科学技术大学, 2006, 11.
Research on Helicopter Rotor Common Taper Measurement Method Based on CCD Technology
LIU Wei*, MAN Junfeng
(School of Computer Science, Hunan University of Technology, Hunan Zhuzhou, 412000, China)
Helicopter airscrew pyramid angle is a main index of airscrew dynamic balance measurement. It is directly related to helicopter safety and other important performance advantages and disadvantages. In actual measurement, when the measurement image contains other objects, the airscrew pyramid angle cannot be calculated. How to solve the problem of identification and classification of the object is a key problem in the measurement method of the airscrew pyramid angle. Based on the CCD imaging technology, this paper proposes the method of extracting the shape features of images and using BP neural network to identify and classify the objects, and then calculate the airscrew pyramid angle, and proves the correctness of the method through experiments.
helicopter; the CCD imaging technology; BP neural network; airscrew pyramid angle
10.19551/j.cnki.issn1672-9129.2018.01.057
TN386
A
1672-9129(2018)01-0140-04
刘伟, 满君丰. 基于CCD技术的直升机旋翼共锥度测量方法研究[J]. 数码设计, 2018, 7(1): 140-142.
LIU Wei, MAN Junfeng. Research on Helicopter Rotor Common Taper Measurement Method Based on CCD Technology[J]. Peak Data Science, 2018, 7(1): 140-142.
2017-10-16;
2017-12-21。
刘伟(1985-),男,湖南衡阳,硕士研究生,研究方向:图像信息处理。E-mail:2646069240@qq.com
猜你喜欢
科学技术创新(2022年23期)2022-07-25
轮胎工业(2022年7期)2022-07-20
中国科技纵横(2022年6期)2022-04-28
航空工程进展(2022年2期)2022-04-24
铁道车辆(2021年6期)2022-01-11
北京航空航天大学学报(2021年9期)2021-11-02
小哥白尼(军事科学)(2021年4期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
中国金属通报(2020年12期)2021-01-05
中国新技术新产品(2020年5期)2020-05-06