移动机器人的电磁谐振式无线充电技术
2018-05-28 08:14高强
电子技术与软件工程 2018年8期
文/高强
移动机器人(Robot)是随着信息技术发展出现的新式机械装置,其融合了现代多种高端技术,包括计算机技术、感应技术等,能够根据工作环境自动工作,也可以通过逻辑编程设定程序、下达指令,使其随时变更工作模式,性能十分优越。目前的移动机器人主要以电能作为动力,这也对其充电模式提出了很高要求。目前来看,通过电磁谐振式无线充电进行电能补充是较为可行的思路,对相关内容进行分析有一定的现实意义。
1 电磁谐振式无线技术原理
电磁谐振式无线技术有两大特点,即非接触式充电和自动寻源。目前常见的移动机器人绝大多数采用接触充电模式,即有线式充电,这种方式对电源所在地、机器人工作环境有一定的要求,一定程度上制约了移动机器人的推广应用。在电磁谐振式无线技术模式下,以能量在固定空间范围内等量传输作为基本原理,通过感应耦合的方式实现距离传输,这一模式的原理与磁铁不同磁极之间的相吸性十分类似。当移动机器人需要补充电能时,磁耦合谐振能量的传输具备两个相同谐振频率的线圈,只要二者距离在设定范围内,磁场即可实现耦合,产生谐振,能量传输的信道快速建立,并持续进行电能的供应。
2 移动机器人的电磁谐振式技术
2.1 无线充电能量输出系统
2.1.1 发出指令
移动机器人无线充电能量输出系统,由高频激励源以及语音播放单元等构成,不同单元的功能存在较大的差异。以高频激励源为例,该单元的元件,包括控制器以及收发器等。收发器既具有能量接收的功能,同时也具有能量输出功能。当机器人电力能源不足,亟待充电时。机器人可随即发出充电指令,通过无线射频单元,触发激励源。当激励源被触发后,线圈会随之产生谐振。此时,线圈周围的磁场会立即发生变化,共振随即形成。在上述环境下,能量会被顺利的传输到中继线圈中,并经中继线圈传递到外界,指令随即被发出。
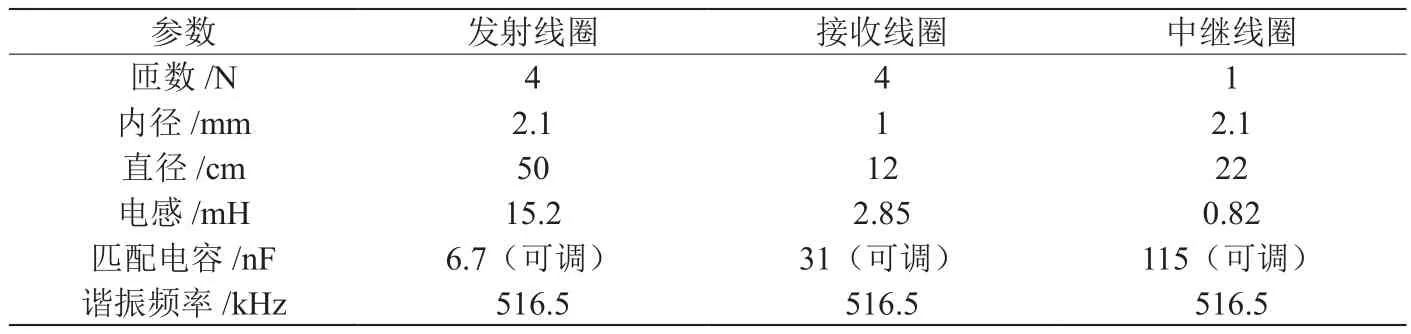
表1:移动机器人系统线圈参数配置
2.1.2 传输指令
指令发出后,移动机械人中所设置的接收器,可利用寻声原理,通过主控单元采集能量,并根据指令信号的特点以及能量大小,确定声源的位置。指令传输的过程,需要利用相应算法来实现。为确保无线充电的目的能够在短时间内达成,使充电效率得以提升。技术人员可考虑将PID算法,应用到指令传输过程中。确保指令能够在发出后,立即被传输至机器人的DSP主控单元中,被主控单元所获取。实践发现,将2.4GHz的无线射频收发芯片nRF24L01,以及增强型控制器纳入到输出系统的设计过程中,将谐振频率设置为516.5kHz,信号的传输功能可有效增强。设计人员可考虑采用上述参数设计输出系统,增强系统功能。
2.2 无线充电能量输入系统
无线充电能量输入系统由电池管理系统、整流稳压电路、谐振接收电路组成。其中,电池管理系统主要负责检测移动机器人何时需要充电,同时还负责电压状态的监测,由此即可明确移动机器人搭载电池何时充满电、何时需要充电,充电时间的合理控制将大大提升电池组使用寿命和移动机器人安全稳定性;整流稳压电路主要负责输出稳定电压,由此即可满足移动机器人搭载电池组充电需求;谐振接收电路的接收频率能够自动适应中继单元发射频率,中继线圈所传输的磁场能量可通过该电路顺利接收,两种频率形成的共振可形成谐振电流满足整流稳压电路需要。表1为移动机器人系统线圈参数配置,结合该图可更深入了解无线充电能量输入系统。值得注意的是,无线充电能量输入系统的功能实现还需要得到由语音播放单元、高频激励源、中继单元、谐振发射电路组成的能量发射系统支持,该系统采用了Nprdic公司生产的nRF24LE1型号的无线单片机。
2.3 无线充电能量控制系统
电磁谐振式无线电力传输结构中的电量控制系统,主要依靠DSP单元控制装置,实行单元结构充电系统的综合性调控。在DSP程序基础上,分别延伸出信息采集单元、信号传递控制单元、充电导航单元、以及线路屏蔽单元。当移动机器人的电磁谐振式无线结构进行综合传输时,系统结构从DSP首先进行信号传输,然后通过高性能浮点装置,实行单元信号的初步采集。如果此时移动机器人的电磁谐振式无线处于正常充电状态,则DSP程序将按照SCI、IC进行信号算法传导,保障移动机器人的电磁谐振式无线信号传输模式的自动性传输。如果移动机器人的电磁谐振式无线处于非正常的充电方式,则系统进行综合性程序算法运作时,系统就可以按照浮点性处理器,运用程序信息对应性处理的方式,进行移动机器人的电磁谐振式充电过程的阶段性调节。
同时,移动机器人的电磁谐振式信号的控制性调整,运用外围控制电流调整方式,实行机器人操作主体程序控制层面的科学性调配,与信号输入系统和信号输出系统的命令相互对应,逐步形成了以DSP程序为主的信息调配结构。
3 结论
综上所述,电磁谐振式无线充电技术的应用,可有效增强移动机器人的动力,使之性能得以改善。有关领域可根据自身的需求,在设计无线充电能量输出系统的基础上,确保充电指令能够被及时发出。在设计无线充电能量输入系统的基础上,提高机器人的信号接收效率。在设计控制系统的基础上,优化机器人的充电功能,最终达到提高移动机器人设计水平的目的。
参考文献
[1]张胜宾,赵祚喜.基于UMBmark算法的移动机器人定位试验研究[J/OL].现代电子技术,2018(03):80-83+87.
[2]宋莉,李彩虹,朱宝艳,王小宇.基于两点法的移动机器人局部路径规划算法[J].山东理工大学学报(自然科学版),2018,32(01):10-14.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
测控技术(2018年5期)2018-12-09
电子测试(2018年18期)2018-11-14
制造技术与机床(2017年3期)2017-06-23
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年4期)2016-04-04
城市轨道交通研究(2015年3期)2015-02-27
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
机电信息(2014年27期)2014-02-27