
微米级单丝纤维的力学性能测试装置研究
2018-05-28 08:33孙秀丽郑佳梅赵雪妮张伟刚刘庆瑶高飞虎冯凯丽蔡双双
陕西科技大学学报 2018年3期
孙秀丽, 郑佳梅, 赵雪妮, 张伟刚, 张 黎, 刘庆瑶, 王 瑶,高飞虎, 冯凯丽, 蔡双双
(陕西科技大学 机电工程学院, 陕西 西安 710021)
0 引言
纤维因具有良好的性能在航空航天材料、衣服的保暖材料、建筑工程、仿人体器官等方面,得到了广泛的应用.一般的,纤维用作复合材料增强体时,其增强、增韧效果主要与纤维的力学性能有关,而拉伸强度是纤维力学性能的重要指标,用以衡量纤维所能承受的最大拉力[1-3].目前,国内现有的强度仪可以满足一般化工,纺织等工业方面的要求,进行一些宏观方面的拉伸强度伸长率等方面的测试,但是对于微观方面的纤维力学性能测试国产强度仪器有很大的局限性,不能满足微米级微观测试要求[4-8].因此,设计研究能够测试单丝微米级纤维拉伸强度的装置具有重要的意义.
现有的单丝纤维拉伸力学性能的测试方法主要包括以下三种:
(1)采用纸片法制样,非自动机械夹持.用强力胶将单丝纤维固定在纸片上,固化后,将带有单丝纤维的纸片固定在机械夹头上并在一定载荷下拉伸,同时记录纤维断裂载荷,计算单丝纤维的拉伸强度[9-11].但纸片法制样周期长、制样过程中纤维需手工定位,易损伤;夹持时需手工装夹,效率低.
(2)采用纸片法制样,气动夹头夹持.测试过程同(1).此夹头具有夹持力可控制,纤维不易受损的优点,但气动夹持装置需要气源,整体结构复杂[12,13].
(3)采用胶滴法制样,非自动机械夹持.根据单丝纤维长度选择合适的制样板,利用胶黏剂(二组分环氧树脂)将纤维粘附在制样板上,制样过程中保证纤维平直,避免其扭曲,且保证胶滴呈圆球状,然后在60 ℃的温度下固化24 h,将圆球状的胶滴卡在“V”型卡头中,通过计算机实时记录拉力载荷,并能够计算出纤维单丝拉伸强度.但手工制样胶滴周期长,胶滴大小不易控制,拉伸过程中纤维易从胶滴中拉出[14].
结合目前已有的测试方法以及各种测试方法上的缺点,本文设计研究了一种结构简单、易于操作、无需提前制样、拉伸纤维长度可调、非手工定位和夹持,工作效率高的新型单丝纤维的力学性能测试装置.
1 测试原理
进行单丝纤维的力学性能测试时,将单丝纤维放置在底板3上,单丝纤维放置于滑块2与挡块4之间且垂直于凹槽延伸方向;然后推动推子1使T型滑块滑至挡块4处停止运动,此时单丝纤维紧贴于T型滑块外侧,呈一条直线,然后沿导轨推动底板3,此时,打开电磁铁的电源,在磁力的作用下使构件5前端的夹头B、构件10前端的夹头A与T型滑块紧密相吸(底板,推子为不可导磁材料,T型滑块,构件5,构件10均为导磁材料),将单丝纤维精确夹持在T型滑块与夹头A和夹头B之间,夹头A与夹头B的距离能够通过固定支架调节;然后将底板3沿导轨滑出,保证单丝纤维在拉伸过程中与底板3不发生干涉,启动压电陶瓷驱动器7,控制单丝纤维的拉伸速度为2μm/min(可调范围为1μm/min至10μm/min);压电陶瓷驱动器通过控制构件5的运动控制单丝纤维拉伸,通过应变传感器8与力学记录仪9协同工作,实现力和位移的测试与记录,获得数据;测试完毕后将设备恢复初始状态,进行下一轮测试.装置的整体结构及剖视图如图1、2所示.
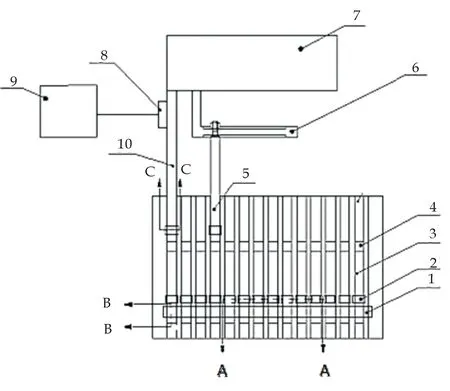
图1 装置整体结构俯视图
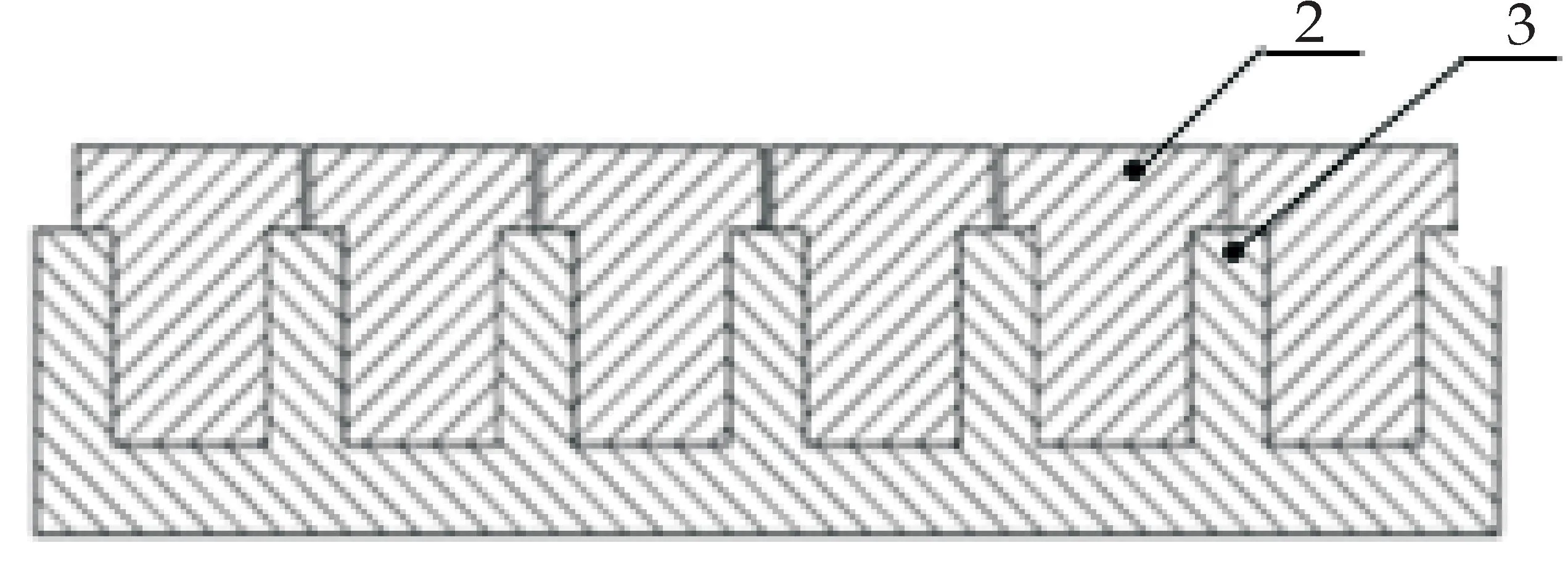
图2 图1的A-A向剖视图
2 微米级单丝纤维的力学性能测试装置
2.1 定位系统
本装置的定位部分主要包括T型滑块2,推子1(如图3所示),底板3,挡块4.从前期的调研中可知,现有的单丝纤维拉伸装置中,对单丝纤维的定位是单丝纤维拉伸装置的难点,考虑到单丝纤维的直径,比如纤维、植物纤维、动物纤维,直径都是微米级的,目前市场上出售的单丝纤维拉伸装置缺少直接对单丝纤维定位的部分,所以该装置中的定位部分是创新点,它实现了单丝纤维无损伤地被定位在带凹槽的底板上,单丝纤维的定位过程:把要测量的单丝纤维放置在带凹槽底板3上,单丝纤维放置于滑块2与挡板4之间且垂直于凹槽的方向,然后推动推子使T型滑块2滑至挡块4处停止运动,此时单丝纤维紧贴于T型滑块2外侧,呈一条直线,实现了单丝纤维的定位(参考图1).
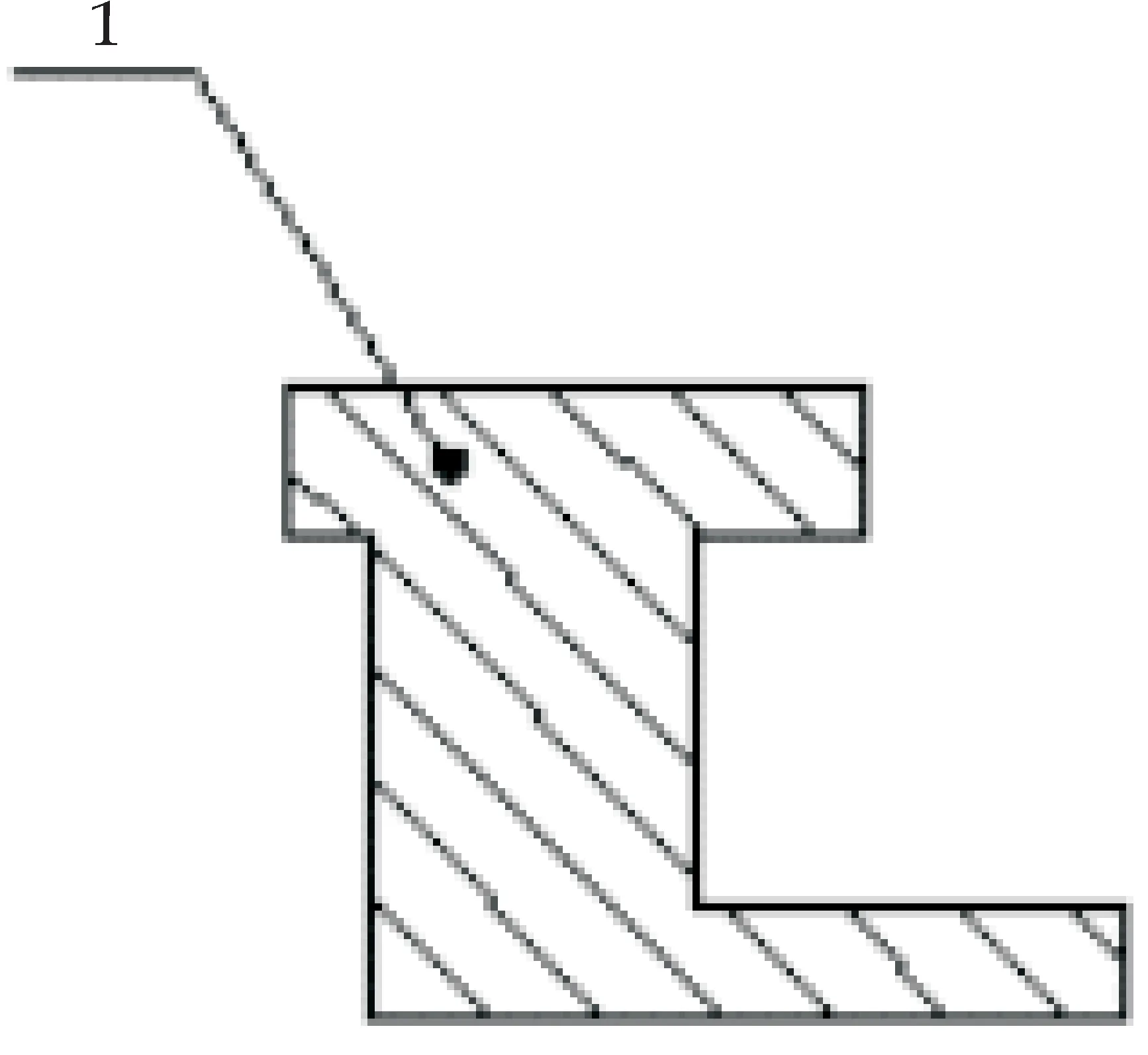
图3 推子的B-B向剖视图
底板设置在导轨上,导轨的移动由压电陶瓷驱动器驱动,导轨能够在压电陶瓷驱动器的驱动下带动底板水平或垂直运动,以调节底板的位置或者在需要抽离底板的时候使将底板沿导轨滑出,保证单丝纤维在拉伸过程中与底板不发生干涉.
考虑到单丝纤维的韧性、刚度以及力学性能测试装置零件加工的难易程度,凹槽的尺寸不宜过小.反之,凹槽的尺寸过大易使单丝纤维在推动过程中呈弯曲状,测试过程中单丝纤维不能保持直线状态,且纤维难以垂直于凹槽分布.因此,底板上凹槽宽度取2 mm为佳,相邻两凹槽之间的距离为1 mm.为防止测试装置其它零件对磁铁夹持效果的影响,底板和推子的材料均选用非导磁材料,T型滑块选用导磁材料.
2.2 夹持系统
本装置的夹持部分包括T型滑块2,构件5、固定支架6、构件10.其中,构件5、构件10、T型滑块2的材料为导磁材料,构件10的前端(与底板凹槽相配合的部分)为夹头A(如图4所示),构件5的前端(与底板凹槽相配合的部分)为夹头B,夹持方式采用电磁铁夹持,电磁铁安装在构件5和构件10上,电磁铁通电后使导磁物体构件5、构件10与T型滑块之间产生吸力,使T型滑块与夹头A和夹头B紧密相吸,纤维被先定位在了T型滑块与夹头A和夹头B之间,电磁铁夹头与T型滑块的吸力大小可以通过调节流过电磁铁的电流大小来控制,电流越大,吸力越大.使单丝纤维在夹头与T型滑块之间保持被夹紧的状态,直到完成单丝纤维的拉伸.单丝纤维拉伸过程中受力分析如图5所示.
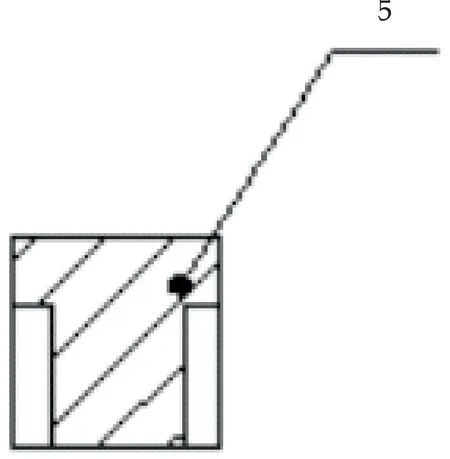
图4 A夹头的C-C向剖视图
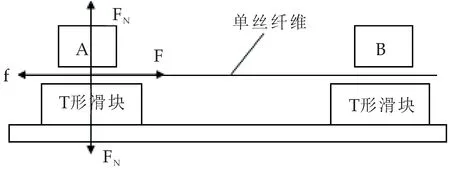
图5 单丝纤维拉伸受力示意图
在图5中,F为压电陶瓷驱动器提供的牵引力;FN1为T型滑块给单丝纤维向上的压力;FN2为夹头A给单丝纤维向下的压力,FN1与FN2大小相等,方向相反;f为夹头A和T型滑块对单丝纤维的摩擦力.
夹持力的大小对于单丝纤维的拉伸是很重要的参数,如果夹持力过大,会使单丝纤维从夹头处断裂,如果夹持力过小,则会使单丝纤维从夹头处拉出,这两种情况均不满足要求,所以测出单丝纤维的拉伸力不能作为拉伸力的参考值.单丝纤维从夹头处拉出的临界条件为:
μ·FN=Ft
其中,FN为作用在单丝纤维上的夹头A、B与T型滑块之间的夹持力,单位为N,μ为单丝纤维与夹头A、B和T型滑块之间的摩察系数,由于T型滑块和夹头A、B的接触面很平滑,故估取μ的值为0.2,F为单丝纤维的最大拉伸力.
夹持部分的电磁铁为圆环形的电磁铁,其铁心主要由内圆环、外圆环和端盖三部分组成,这三者间的圆环形槽中放置铜导线,内圆环套在机构的轴上,以固定电磁铁、衔铁为一个圆环形铁块[15].电磁铁与零件10相配合的三维图,如图6所示.图7为电磁铁与零件10的俯视图和剖视图.
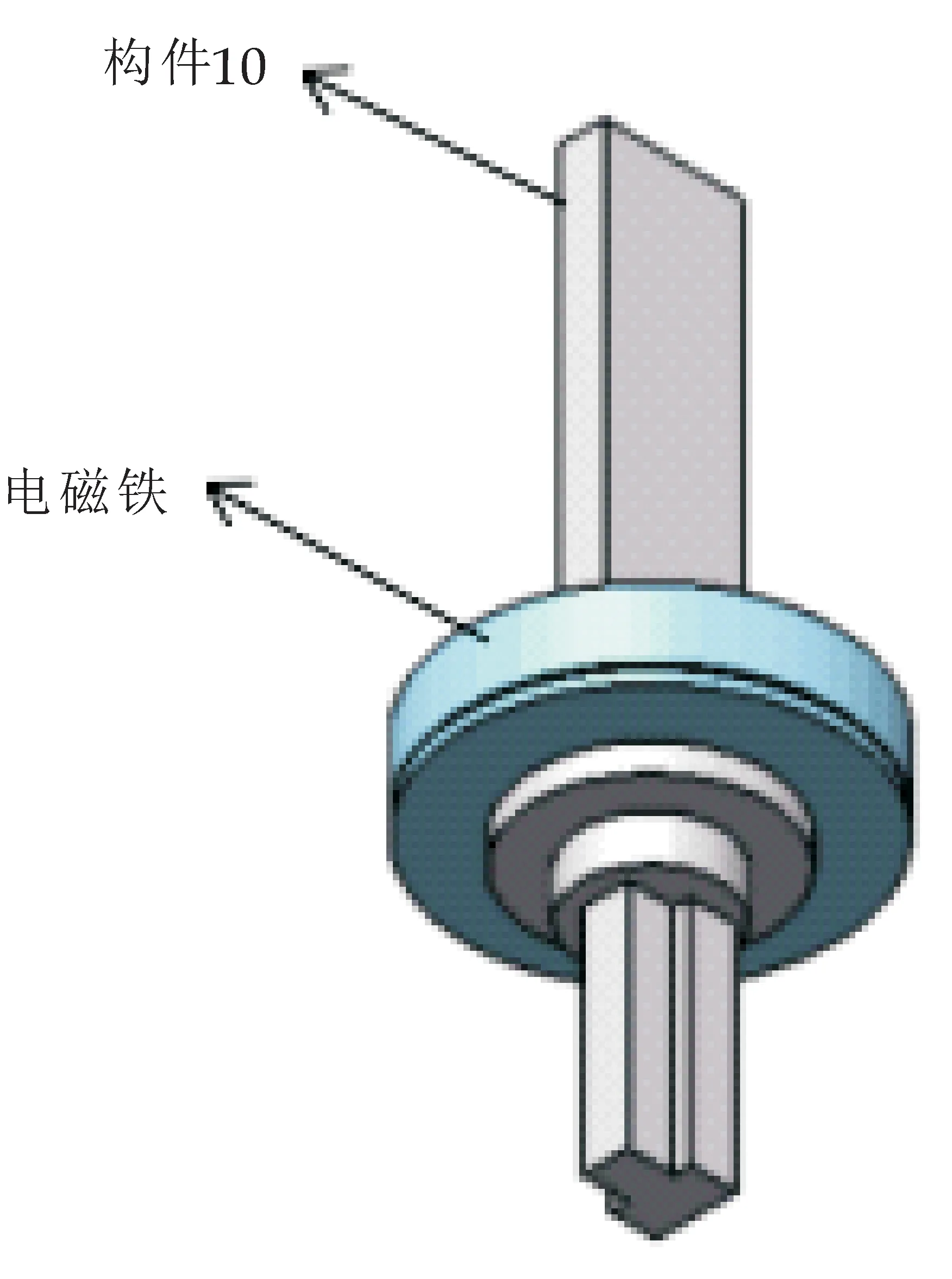
图6 电磁铁与零件10相配合的三维图
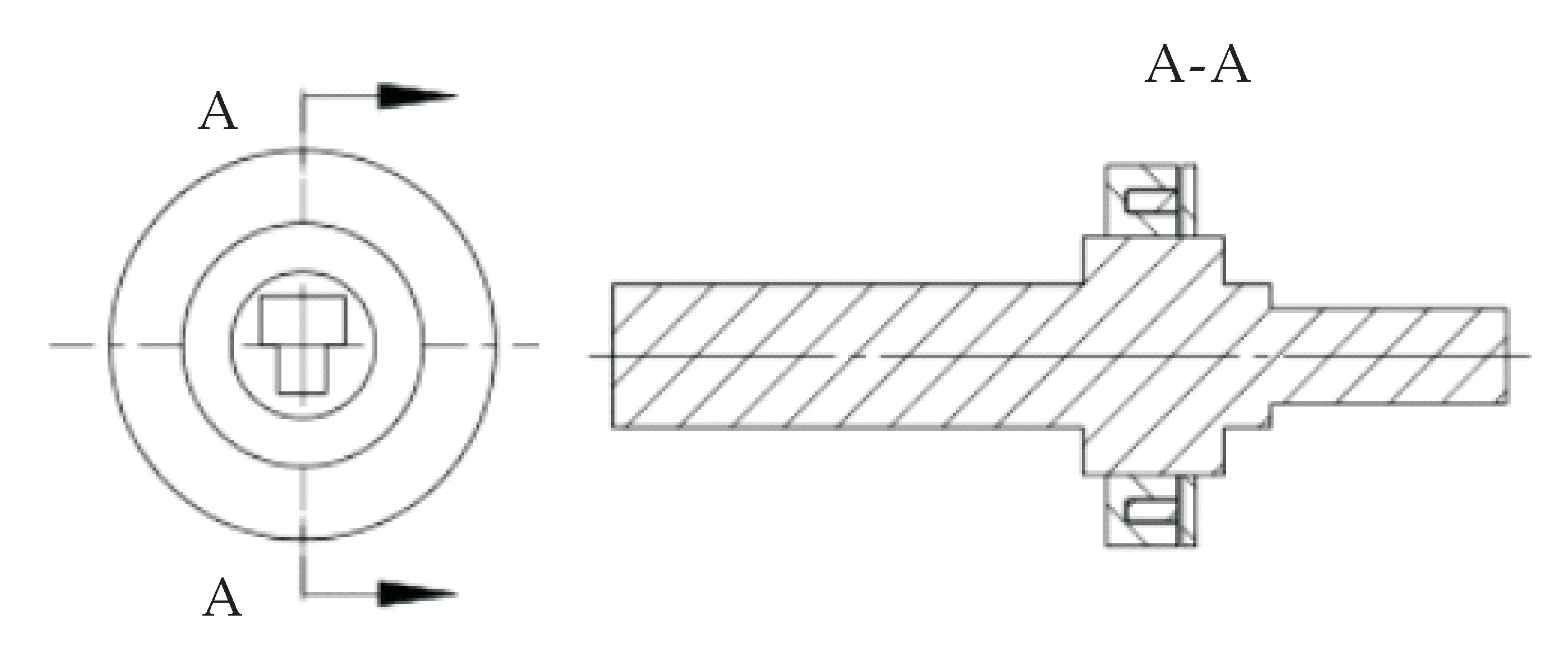
图7 电磁铁与零件10相配合的俯视图与剖视图
2.2.1 电磁铁结构的选用
距离夹头A、B前端面10 mm处安装一个圆环形电磁铁,提供夹头与滑块间的吸力,实现单丝纤维的夹持.电磁铁的模型求解参数材料及参数设计,铁芯材质为冷轧钢35W300,衔铁采用冷轧钢35W270,线圈由铜导线绕制,线圈匝数为330匝,R1=25 mm,R2=22.5 mm,R3=16.2 mm,R4=12 mm,衔铁厚度为4 mm,铁心长度为20 mm,放置线圈环形槽长度为16.4 mm[15].
2.2.2 电磁铁吸力计算
电磁吸力大小与磁力线穿过磁极的总面积及气隙中的磁感应强度的平方成正比.如果磁感应强度B沿磁极表面上是均匀分布的,则电磁吸力的基本公式为[15]:
(1)
式(1)中:F为电磁力(J/cm);B为磁感应强度(Wb/cm2);S为磁极表面总面积(cm2);μ0为空气磁导系数,为1.25×10-9H/cm.
(2)
依据磁路等效模型得:
(3)
依据电磁铁结构计算气隙磁导:
(4)
式(4)中:S1=π(R12-R22)为铁心外圆面积;S2=π(R32-R42)为铁心内圆环面积;δ为气隙长度[16].
由基尔霍夫第二定律粗略估算一下磁通,由于空气磁导率相对铁心和衔铁要小上千倍,此时粗略估计即认为所有的磁动势都消耗在气隙中,故:
(5)
由于实际磁路中铁心和衔铁也有磁势降,故磁路中实际磁通比上述估算值要小,由于圆环形磁电磁铁气隙相对较大,这里取实际值降5%,即:
(6)
将仿真模型中的参数代入式(2),外加直流电源控制通入线圈的电动势IW=99.4时,便得到环形电磁铁吸力与气隙的关系式[16]:
(7)
将式(6)中δ的单位转换成mm,F的单位换成N,得到:
(8)
根据此模型可知,δ为气隙长度,由此模型的电磁铁可知,若要计算夹头的夹持力F,在此设备中δ相当于电磁铁距离T型滑块的距离,已知δ=10 mm,根据公式,F的大小可以通过电流的大小调节,根据测试不同的单丝纤维种类,多次测试,选出最合适的电流范围,使环形电磁铁提供的吸力可以满足单丝纤维拉断所需的夹持力,保证纤维在拉伸过程中不出现从夹头处拉出及夹断的现象.
2.3 驱动和测量系统
本装置的驱动部分包括压电陶瓷驱动器,设置压电陶瓷驱动器运动速度为2μm/min,精度为1μm,固定支架6上设置有直线形的导轨,构件5能够沿着导轨在固定支架6上移动,移动轨迹与构件5的延伸方向垂直,夹头A和夹头B之间的距离范围为1~29 mm,满足不同纤维的性能测试[17].
本装置的测量部分包括应变传感器8,力学记录仪9.构件10表面贴有应变传感器8,应变感应器与力学记录仪9连接,应变传感器8用于将构件10的位移及形状变化传送给力学记录仪9,实现了单丝纤维拉伸过程中力和位移的测试与记录.微米级单丝纤维的力学性能测试部分的原理图如图8所示,测试系统主要由应变传感器、电荷放大器、数据采集仪和分析软件组成.在测试中各实验仪器的型号如表1所示.
应变传感器安装在夹头A靠近压电陶瓷驱动器的一端,在进行拉伸实验时,力学信号通过应变传感器转化成电信号,经过电荷放大器和数据采集仪传送至分析软件[18],从而完成单丝纤维的力学性能测试.
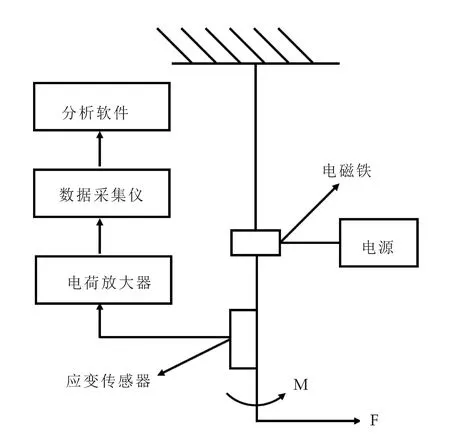
图8 测试原理图
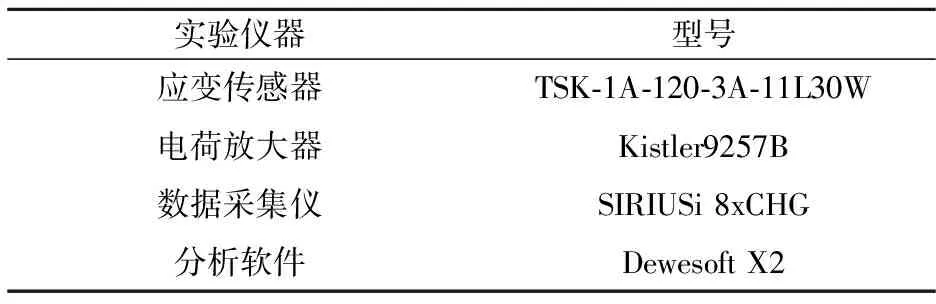
实验仪器型号应变传感器TSK⁃1A⁃120⁃3A⁃11L30W电荷放大器Kistler9257B数据采集仪SIRIUSi8xCHG分析软件DewesoftX2
3 主要零件的校核
构件10的受力分析图如图9所示,构件图的受力简化图如图10所示.F1为压电陶瓷驱动器提供的拉伸单丝纤维牵引力,F2为在构件10电磁铁对构件5和构件6的吸力,但电磁铁的外面包裹着一层绝缘层且两构件上的电磁铁之间有一端距离的空隙,所以F2的值并不大,在拉伸单丝纤维之前,设备预拉伸一次,这样就能完全消除F2对测量单丝纤维的拉伸力结果的影响.
根据构件10的受力分析图,结合所学的力学知识,C处为危险截面,C处只受弯矩力并不受扭矩力,所以只需校核C处的弯矩.C点所受弯矩为M=F1×L1+F2×L2.
F1为所测试的单丝纤维的拉伸力,F2为电磁铁之间的吸引力,其大小与构件5和构件10之间的距离的平方成反比,因此F2的力很小,而C处的横截面为矩形,长10 mm,宽2 mm.材质由为导磁材料(铸铁),以纤维为例,F1≤0.3 N,经校核合格.
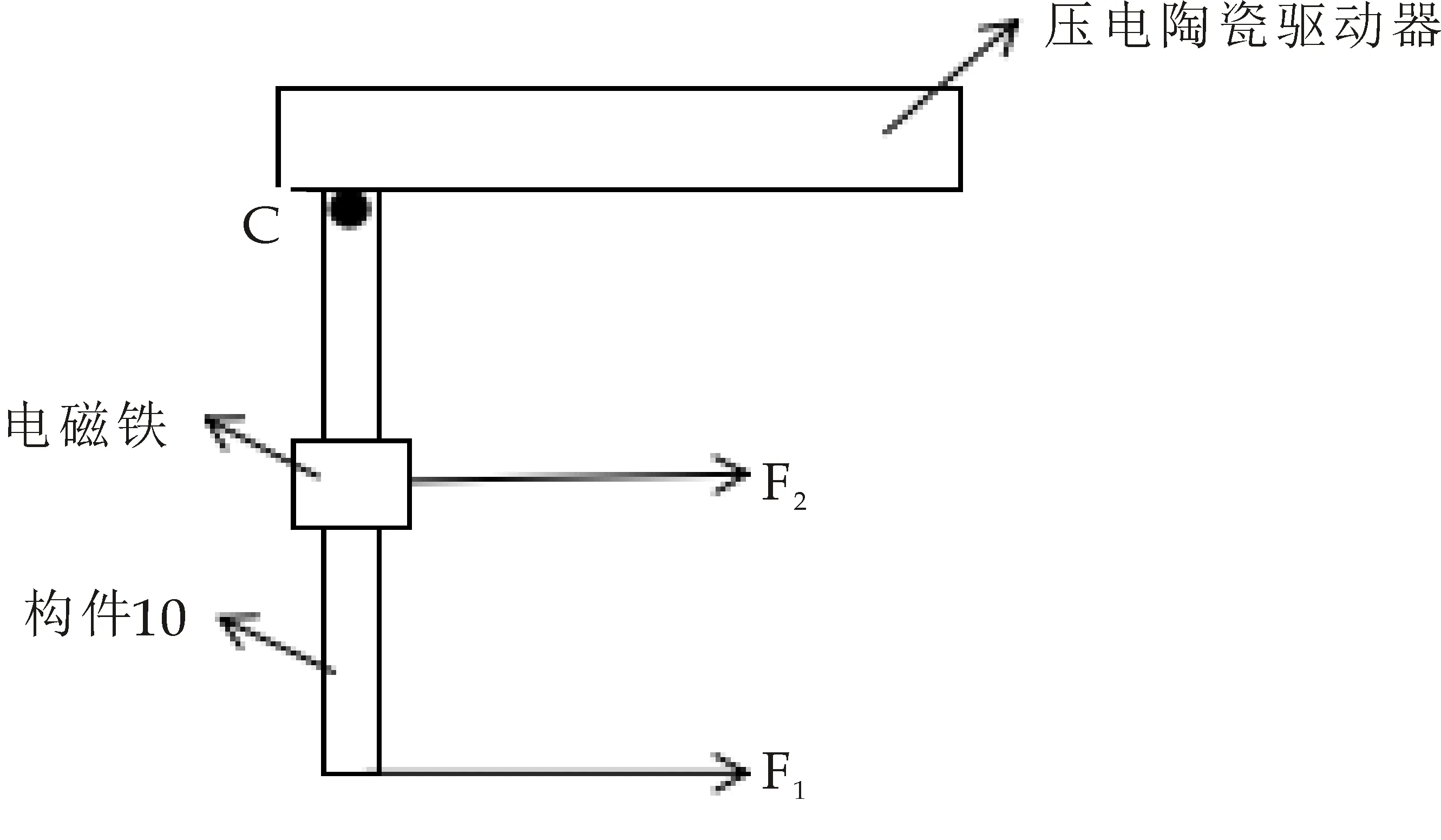
图9 构件10的受力分析图
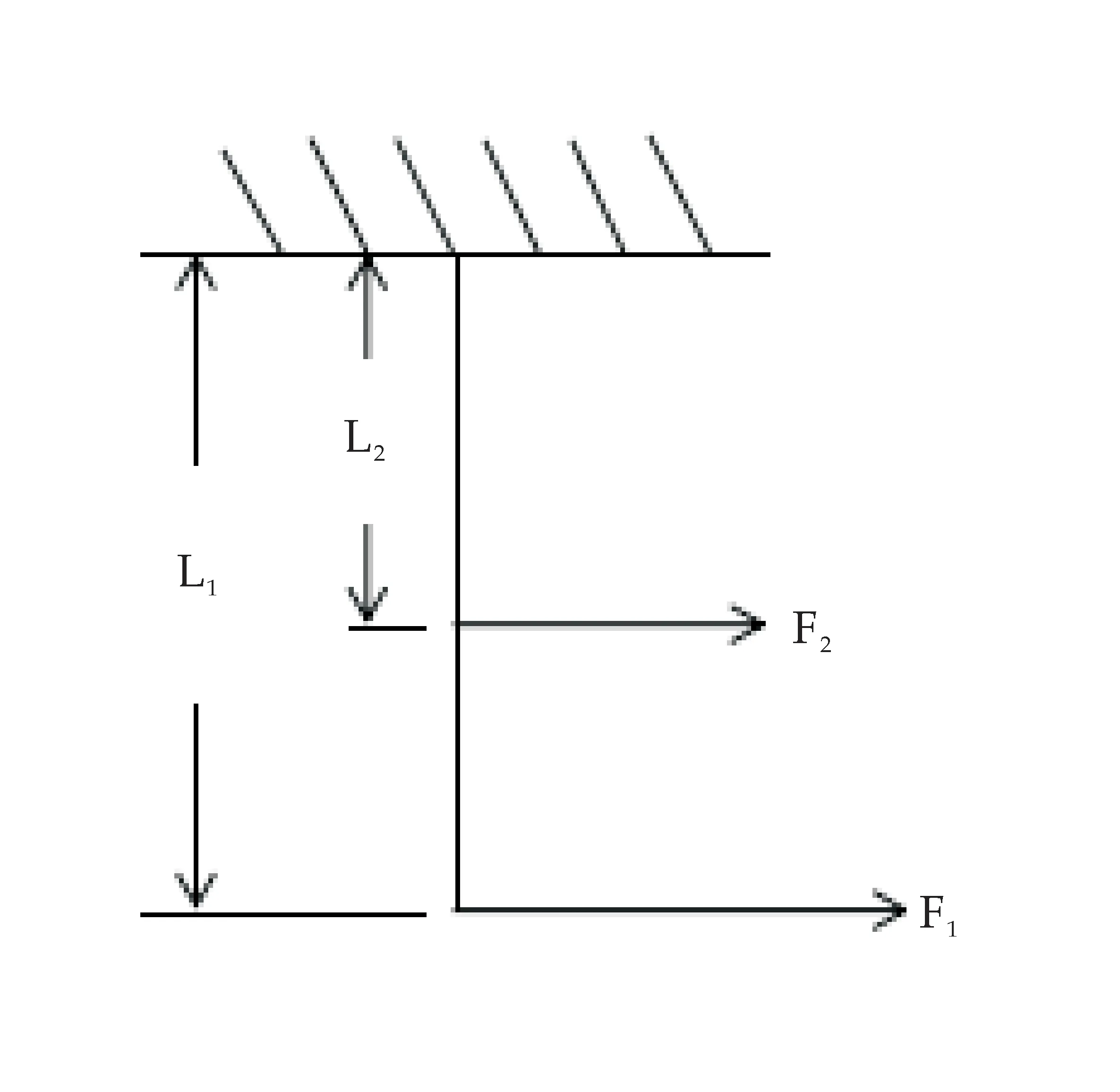
图10 构件10的受力简化图
同上,对构件5和构件6校核,其受力分析图如图11所示.
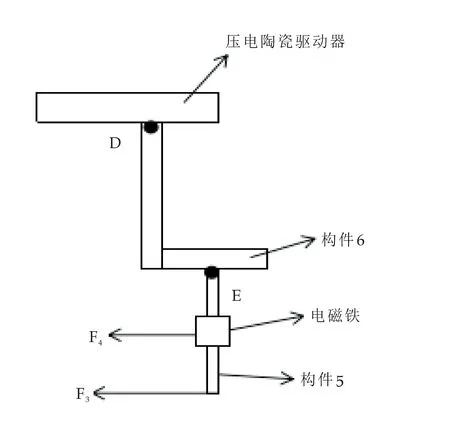
图11 构件5和构件6的受力分析图
对于构件6,D点处为危险截面,对于构件5,E点处为危险截面,F1与F2大小相同,方向相反,F2与F4大小相同方向相反.D到构件5前端夹头B的距离等于构件10的长度L1,D到E的垂直长度为L,D、E处的截面形状都与C处一样,根据力学知识可知,只需校核D处,校核结果与构件10的C处相同,合格.
4 预实验结果分析
在上述设计基础上,本文采用预实验装置进行了单丝纤维拉伸测试.单丝碳纤维直径大约7~10μm,其他一些动物纤维直径大约20μm.实验发现单丝碳纤维既没有从夹持处断裂,也没有从夹持处拔出,该预实验装置能够满足模拟实验.
单丝纤维的力学性能测试过程如下:
(1)制样.制样时随机地从束丝中选取一根碳纤维,由于碳纤维是脆性纤维因此在选取纤维时应特别注意操作,避免对纤维造成损伤.
(2)夹持.实验过程中使用滑块推动单丝纤维匀速运动,单丝纤维运动至挡块处时停止运动,此时单丝纤维紧贴于滑块外侧,呈一条直线状态.在磁力的作用下夹头A、B分别能与滑块相吸且紧密贴合(滑块,夹头A、B均为导磁材料),实现单丝纤维精确夹持在滑块与夹头A、B之间,夹头A与夹头B的距离通过固定支架调节.
(3)拉伸测试.启动驱动器,控制单丝纤维的拉伸速度,通过应变传感器与力学记录仪实现力和位移的测试记录,获得数据.实验共测试30个试样,最后对测试数据进行分析处理,得到单丝纤维的拉伸强度.
碳纤维的应力可以通过拉伸的断裂力值F与纤维的横截面积A计算得到:
(9)
式(9)中:σ为纤维断裂应力值,单位Pa;F为纤维断裂的强力值,单位N;A为纤维的横截面积,单位m2.
单丝纤维拉伸强度结果(如图12所示)显示,碳纤维的拉伸强度值分布范围为2.5~5.0 GPa,其值主要集中在3.0~3.5 GPa.
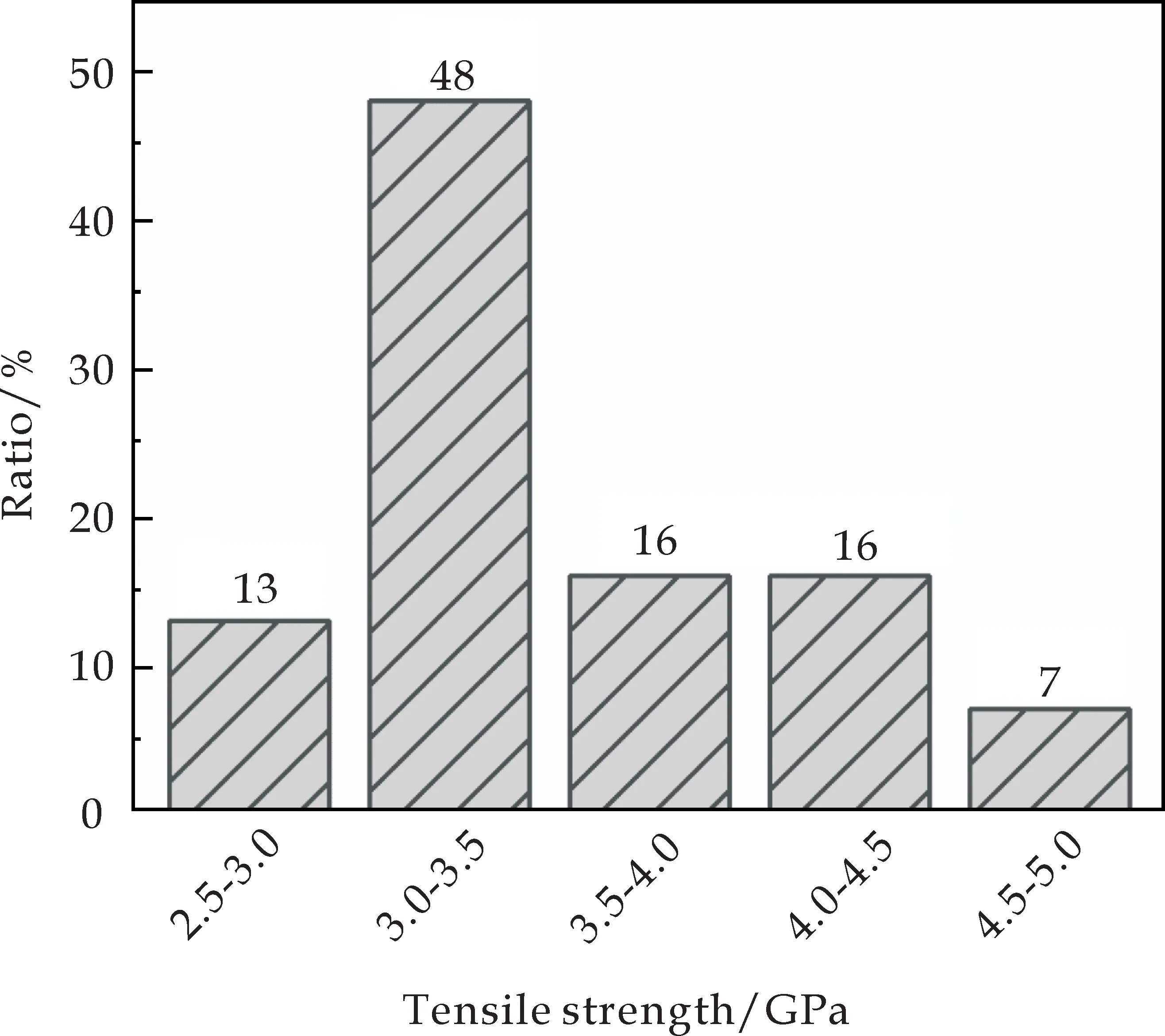
图12 单丝碳纤维拉伸强度分布
5 结论
本文研究设计出一种测试单丝纤维的拉伸装置,装置采用导轨和推子组合结构实现单丝纤维在拉伸之前的定位,通过圆环形电磁铁提供夹头与T形滑块间的吸力,通过控制流过圆环形电磁铁线圈的电流大小,可以调节T形滑块与夹头之间的夹持力,得到所需单丝纤维的夹持力的有效范围.经校核主要受力的零件,全部合格.此装置结构简单、易于操作、无需提前制样、大大提高了单丝纤维拉伸力学性能测试的工作效率,还有拉伸纤维长度可调、非手工定位和夹持等优点,为以后更进一步改进单丝纤维的拉伸装置提供了一种方法和理论依据.
[1] Wang X,Zhao X,Wang W,et al.Controllable preparation of a nano-hydroxyapatite coating on carbon fibers by electrochemical deposition and chemical treatment[J].Materials Science & Engineering C,2016,63(1):96-105.
[2] 曾 帅,贾智源,侯 博,等.碳纤维-玻璃纤维层内混杂单向增强环氧树脂复合材料拉伸性能[J].复合材料学报,2016,33(2):297-303.
[3] Liu H T,Yang L W,Han S,et al.Interface controlled micro-and macro-mechanical properties of aluminosilicate fiber reinforced SiC matrix composites[J].Journal of the European Ceramic Society,2017,37(3):883-890.
[4] 陈 菁,顾轶卓,杨中甲,等.高温处理对几种玄武岩纤维成分和拉伸性能的影响[J].材料工程,2017,45(6):61-66.
[5] 武玉芬,张博明.碳纤维拉伸强度的离散性分析[J].玻璃钢/复合材料,2010(3):29-31.
[6] 曹双平,王 戈,余 雁,等.几种植物单根纤维力学性能对比[J].南京林业大学学报(自然科学版),2010,34(5):87-90.
[7] Hao L,Peng P,Yang F,et al.Study of structure mechanical heterogeneity of polyacrylonitrile-based carbon fiber monofilament by plasma etching-assisted radius profiling[J].Carbon,2017,114:317-323.
[8] 谢 奔,朱 波,王 政,等.PAN初生纤维拉伸性能实验研究[J].功能材料,2012,43(15):441-443.
[9] Yang Y F,Zhang X J,Tian Y H.Test methods for tensile properties of carbon fibers multifilament and monofilament[J].Physical Testing & Chemical Analysis,2013,49(7):2 018-2 021.
[10] 宋迎东,高希光,方光武.一种碳纤维单丝拉伸强度测试装置及其测试方法[P].中国专利:CN103837408A,2014-06-04.
[11] 孙 宇.固定纸卡在碳纤维单丝拉伸过程中的影响研究[J].中国纤检,2014(21):77-79.
[12] 姚江薇,于伟东.碳纤维单丝强伸实验的影响因素[J].材料科学与工程学报,2005,23(6):810-813.
[13] 余 雁,王 戈,江泽慧,等.一种测试植物纤维拉伸力学性能用夹具[P].中国专利:CN201535738U,2010-07-28.
[14] 张晓东,温广武,黄小萧.一种测量纳米纤维单丝拉伸强度的方法[P].中国专利:CN101819109A,2010-09-01.
[15] 何海波,刘海龙.异步压电陶瓷驱动器径向电磁力的分析[J].微压电陶瓷驱动器,2011,44(8):26-31.
[16] 梅 亮,刘景林,付朝阳.电磁铁吸力计算及仿真分析研究[J].微压电陶瓷驱动器,2012,45(6):6-9.
[17] 刘大彪,何玉明,胡 鹏,等.单纤维微拉伸力学性能测试与分析[J].实验力学,2012,27(1):61-69.
[18] 米德龙.碳纤维单丝拉伸测试装置设计与相关技术研究[D].哈尔滨:哈尔滨工业大学,2016.
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
一重技术(2021年5期)2022-01-18
合成纤维工业(2021年5期)2021-10-31
科学技术创新(2021年22期)2021-08-16
防爆电机(2021年2期)2021-06-09
湖南工业职业技术学院学报(2021年1期)2021-04-13
纺织报告(2020年10期)2021-01-19
合成纤维工业(2020年4期)2020-09-16
纺织报告(2020年3期)2020-07-13
通信电源技术(2020年21期)2020-03-06
