
模糊PID智能灌溉控制器的设计及MATLAB仿真
2018-05-30 02:04於沈刚马明舟岳雪峰王运圣
节水灌溉 2018年5期
於沈刚,马明舟,岳雪峰,万 衡,王运圣
(1.上海应用技术大学,上海200235;2.大连理工大学城市学院,大连116600;3.上海市农业科学院农业科技信息研究所,上海201403;4.上海数字农业工程技术研究中心,上海 201403)
0 引 言
20世纪90年代以来我国节水农业发展进入了新的时期,如今的节水灌溉技术已发展成节水灌溉工程技术和节水灌溉农业技术为主并相互结合的技术体系[2]。由于人工智能技术的发展,一些控制理论如专家系统、模糊逻辑控制、神经网络控制、协同控制等被广泛地应用到工程问题的预测和建模。这些理论基于自动化传感器设备,监测土壤水分, 利用气象数据,估算植物蒸腾量,然后经过控制理论的分析和处理,进行逻辑判断,进一步将信号送到执行机构,控制一些电磁阀的关闭,更好、更及时、更准确地预测环境参数,及时调整输出响应以适应作物不同生长时期对水分的需求。
温室是随着农村经济结构和作物种植结构调整发展起来的新型设施农业,相对于大田农业而言,其具有占地面积小,种植灵活,易于控制作物生长环境等优点。为了解决我国北方冬天蔬菜供应短缺问题,北方开始大规模推广和发展温室农业[3]。温室是一个复杂的大惯性、纯延时和非线性系统,难以对其建立精确的数学模型,传统的控制方法在实时性和控制精度上已不能满足其控制要求[4]。模糊控制是一种非线性的控制方式,不需要建立对象的精确数学模型,根据领域专家知识或操作人员经验就可制定针对对象有效的控制策略,响应速度快,但控制误差较大[5],PID控制器对于时变系统具有很好的鲁棒性,适应性强。基于以上2种控制方法优点,针对温室灌溉系统具有非线性、严重滞后的特性[6],本论文提出了一种PID控制和模糊控制相结合的模糊PID控制方法,并利用MATLAB搭建仿真模型证实其可行性。
1 温室灌溉控制系统结构设计
通常温室内的水分环境包括空气湿度和土壤湿度2个方面,而对植物的生长发育起到关键作用的是土壤湿度。本文设计的控制器通过对土壤湿度变化的控制,使得土壤湿度一直稳定在植物最佳土壤湿度值附近,从而实现对植物实时、适量的灌溉。
系统采用的是两输入三输出的二维模糊控制策略,通过模糊控制调节PID控制器的3个修正参数,提高系统的动态响应速度,增强系统对于外界条件变化的适应性,同时PID控制器能够有效地降低稳态误差,提高精度。模糊控制器的输入量为传感器测得的土壤湿度值y测与设定的最佳土壤湿度值y目的偏差E和偏差的变化率EC,输出量为PID控制器的3个输入修正参数ΔKp、ΔKi、ΔKd。系统的结构框图见图1。
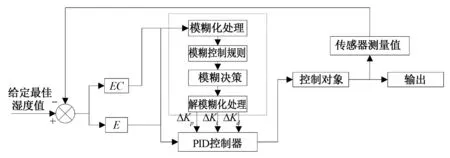
图1 控制系统结构框图
图1中误差E值由式E=y目-y测得到,其中y目为系统设定的土壤湿度最佳值;y测为测得土壤湿度实时值。误差的变化率由EC=E(k)-E(k-1)得到,E(k)为k时刻的土壤湿度值;E(k-1)为k-1时刻的土壤湿度值。将E与EC作为模糊控制器的2个输入,通过设定变量因子进行模糊化处理,制定模糊控制规则表,进行模糊决策,输出为PID控制器输入的3个修正参数ΔKp、ΔKi、ΔKd,通过比例因子进行解模糊化处理并作用于PID控制器输出 值,最后作用于控制对象输出灌溉水量,完成作物灌溉。
2 模糊PID控制器的设计
2.1 模糊PID控制器组成
模糊PID控制器主要由模糊控制器和参数可调节PID控制器2部分组成,模糊控制器完成对参数可调节PID控制器3个参数的整定,参数可调节控制器的输出完成对系统的控制[7]。PID控制器由比例环节(Proportional)、积分环节(Integral)和微分环节(Differential)组成,连续PID控制器的一般形式为[8]:

(1)
式中:Kp为比例系数;Ki为积分系数;Kd为微分系数;u(t)为系统t时刻的控制作用;E(t)为误差,EC(t)为误差的变化率,这2个变量同时作为模糊控制器的2个输入。
2.2 模糊PID控制规则制定
实验对象是甜瓜,考虑节水灌溉的实际条件和控制精度,定义偏差E的基本论域是[-5%,5%],偏差变化率EC的变化范围是[-3%,3%],甜瓜的整个生长期内的最佳土壤湿度范围为[13%,23%][9];根据滴灌实验可测的在深度20 cm处的土壤湿度从13%升高到23%用时约30 min,则设定输出变量U的基本论域为[0,30]。模糊子集的数量决定了对所研究对象的模糊论域的分割程度,模糊子集太少分割太粗,影响系统控制精确度;模糊子集太多,则模糊规则制定较多,系统控制较复杂,但控制精确度明显提高。基于模糊子集制定规则以及控制系统的实际控制要求,定义E和EC的模糊语言值各有7个:{负大,负中,负小,零,正小,正中,正大},简记为{NB,NM,NS,Z,PS,PM,PB},其对应的模糊子集的论域为{-3,-2,-1,0,1,2,3}。输出变量u包括PID控制器的3个修正参数ΔKp、ΔKi、ΔKd,定义3个修正参数的模糊子集为{负大,负中,负小,零,正小,正中,正大},简记为{NB,NM,NS,Z,PS,PM,PB},其对应的模糊子集论域为{-10,-6.67,-3.33,0,3.33,6.67,10},考虑实际温室灌溉系统还没有措施可以快速有效降低土壤湿度,模糊PID控制器输出U的上限为4,下限为0,避免了因人为或系统的故障导致土壤湿度远远高于设定阈值而带来的农业经济损失。为了进行模糊化处理,必须利用误差E的量化因子ke和误差变化率EC的量化因子kec将输入量由基本论域转化到模糊论域。误差E的量化因子ke和误差变化率EC的量化因子kec以及输出变化量U的比例因子ku由下式表示[10]:
电喷柴油机试车台监控系统按通用化、系列化和组合化的要求设计,选用SRI-VC2100标准的控制器,主要由集控台、监测数据采集箱和车钟复示箱组成(见图3)。该系统主要配置的模块是遥控控制模块、安保控制模块和数据测量模块等(见表1)。
ke=n1/|emax|=3/0.05=60
(2)
kec=n2/|ecmax|=3/0.03=100
(3)
ku=|Umax|/m=30/4=7.5
(4)
式中:n1,n2,m分别为偏差E、偏差变化率EC和输出变量U的模糊论域最大值;emax、ecmax、umax分别为偏差E、偏差变化率EC和输出变量U的基本论域最大值。
隶属度函数的选择遵循的规则是[11]:在误差为零附近区域,采用分辨率较高的隶属度函数;在误差较大的区域,为使系统具有更好的鲁棒性能,选择分辨率较低的隶属度函数。针对实际情况,为了更好地解决系统灵敏度和稳定性相矛盾的关系,对湿度偏差E语言值{NB,NM,NS,Z,S,PM,PB}分2种制定规则,隶属度函数NB、NM、PM、PB采用高斯型隶属度函数,NS、Z、PS采用三角隶属度函数。湿度变化率采用三角隶属度函数,输出3个修正参数值采用三角隶属度函,具体隶属度函数曲线见图2、图3。
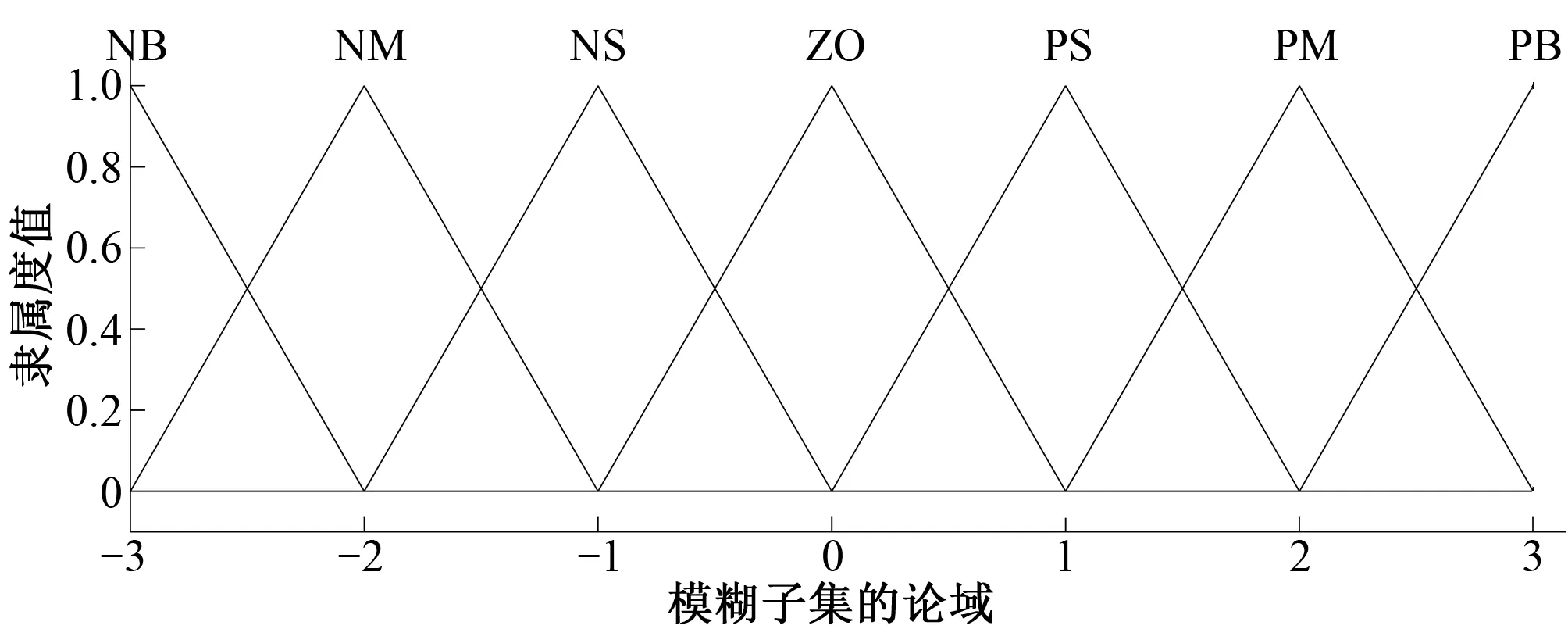
图2 E隶属度函数曲线
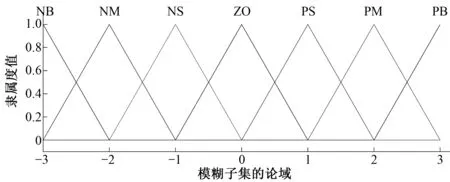
图3 EC、ΔKp、ΔKi、ΔKd隶属度函数曲线
2.3 PID参数整定一般规则[12]
(1)当误差|E|较大时,为使系统具有较好的快速收敛性能,不论误差的变化趋势如何都应取较大的Kp和较小的Kd,同时为了避免积分饱和使得系统响应出现较大超调,应降低积分作用,Ki取值较小,通常取Ki=0。
(2)当误差|E|和|EC|处于中等大小时,为防止超调过大,保证系统的收敛速度,Kp的取值应小一些,Ki取值中等大小。如果此时EEC<0,则应取较大的Kd防止系统超调;反之,EEC>0,应取适中的Kd,阻止误差继续增大。
(3)当误差|E|较小或为零时,为保证系统的稳态性能,应取较大的Kp、Ki值,为了避免输出相应在设定值附近出现剧烈震荡以及增加调节时间,Kd值须要遵循原则是:当偏差|EC|值较大时,Kd取值较小;当偏差|EC|值较小时,Kd取值较大,通常Kd取值中等大小。
2.4 模糊PID控制逻辑规则表
模糊控制的核心是总结工程操作人员的技术知识和实际操作经验,制定符合工程项目需求的模糊控制规则表。根据以上PID参数整定规则可制定模糊PID控制逻辑规则表,见表1~表3。
3 模糊PID控制系统模型搭建及simulink仿真

表1 ΔKp的模糊控制规则
表2ΔKi的模糊控制规则
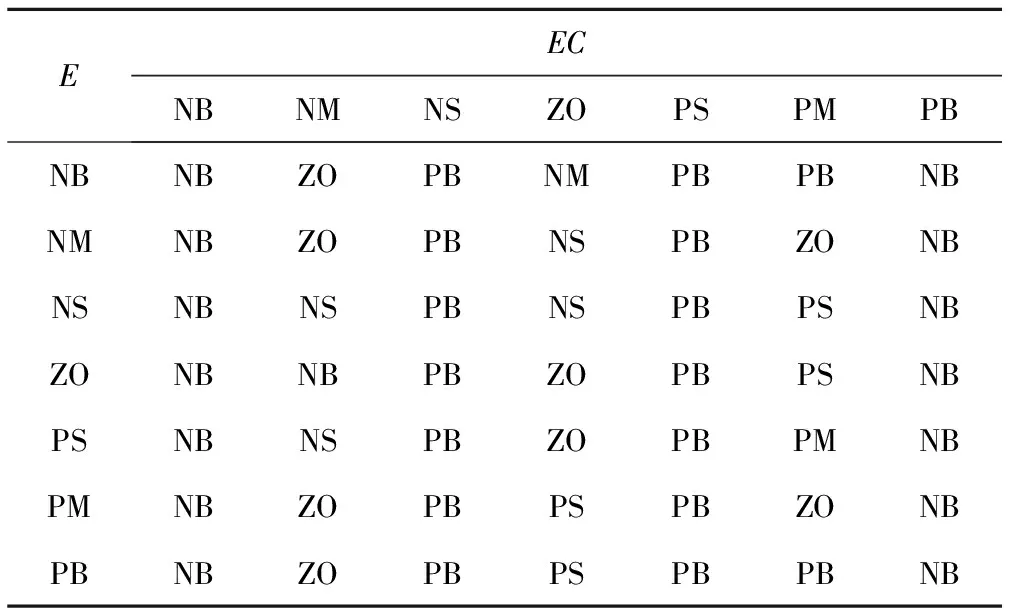
EECNBNMNSZOPSPMPBNBNBZOPBNMPBPBNBNMNBZOPBNSPBZONBNSNBNSPBNSPBPSNBZONBNBPBZOPBPSNBPSNBNSPBZOPBPMNBPMNBZOPBPSPBZONBPBNBZOPBPSPBPBNB
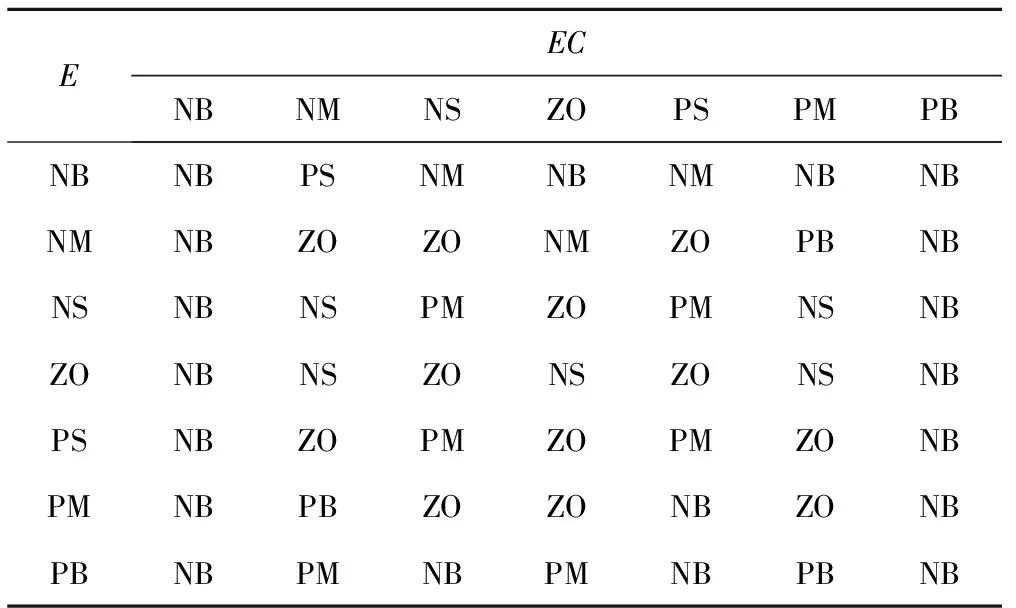
表3 ΔKd的模糊控制规则
为了验证所设计控制器的有效性,应用MATLAB环境下的Simulink仿真软件对温室灌溉系统进行建模与仿真,具体模型见图4。
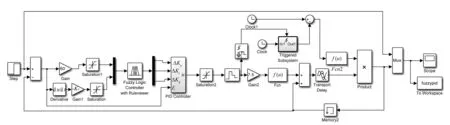
图4 simulink搭建温室灌溉系统仿真模型
模型中考虑到实际土壤水势曲线为非线性,采用目标函数[13]Δy=sin(2 πu/T),由于土壤湿度从13%变化到23%用时为30 min,计算周期T=1 882 min。考虑到土壤湿度值受到多种因素影响,在灌溉过程中土壤中的水分会通过基质渗透或植物蒸腾作用而消耗,因此设定系统的损耗函数Fun2=exp(-u/500)。温室灌溉系统是纯时延系统,添加一个Transport Delay模块,模拟延时环节。通过单独PID控制器仿真分析,当PID Controller中的3个参数Kp、Ki、Kd的初始值设为Kp0=15、Ki0=0.5、Kd0=0.08且Kp的变化范围为[10,20],Ki的变化范围为[0,1],Kd的变化范围为[0,0.16]时,系统的控制效果较好。PID控制器的3个参数Kp、Ki、Kd及其对应的输出比例因子ap、ai、ad由以下公式表示:
Kp=ΔKpap+Kp0
(5)
Ki=ΔKiai+Ki0
(6)
Kd=ΔKdad+Kd0
(7)
(8)
(9)
(10)
式中:Kpmax、Kimax、Kdmax分别对应Kp、Ki、Kd变化范围内的最大值;n3、n4、n5分别对应Kp、Ki、Kd模糊论域最大值。
仿真结果曲线见图5,系统动态稳定局部放大曲线见图6。
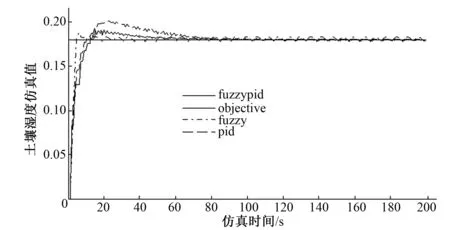
图5 湿度仿真曲线
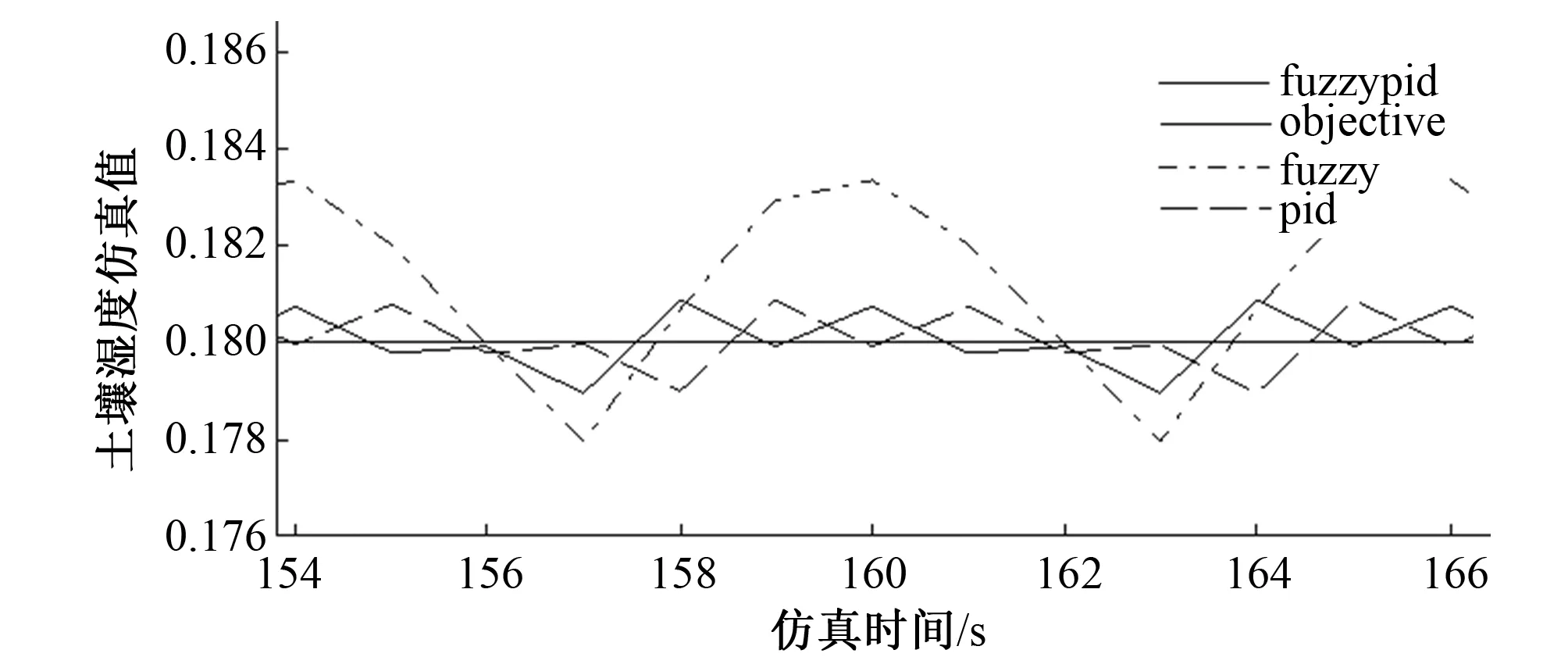
图6 湿度仿真曲线局部放大
从仿真曲线可以看出,本文设计的PID模糊控制器能够使目标湿度和控制湿度的误差稳定 以内,与单一的PID控制器相比,误差精度提高了2%左右;与单一的而模糊控制器相比,仿真曲线收敛速度快了20 s,且超调量减少了5%。仿真结果达到预期,系统设计符合温室灌溉要求。
4 结 语
通过比较模糊控制器和PID控制器的优缺点,综合设计模糊PID控制器,扬长避短,用Simulink搭建温室灌溉控制系统,考虑影响植物生长的主要因素,控制土壤湿度稳定在植物生长所需最佳土壤湿度误差范围内。仿真曲线表明控制误差可以稳定在5%范围内,超调量为6.7%,仿真曲线收敛时长80 s,能够达到温室节水灌溉要求。该控制器对非线性,纯时延系统有很好的鲁棒性,稳态精度高,控制效果好,对实验平台的搭建、灌溉控制器策略的选择有一定的借鉴意义。
:
[1] 邓 忠,翟国亮,吕谋超,等. 我国农业应对干旱灾害的技术研究现状及展望[J]. 节水灌溉,2016,(8):162-165.
[2] 徐文静,王翔翔,施六林,等. 中国节水灌溉技术现状与发展趋势研究[J]. 中国农学通报,2016,32(11):184-187.
[3] 杜云明,盖丽娜,颜兵兵. 基于单片机的温室灌溉控制系统设计[J]. 农机化究,2012,34 (12) 88-91.
[4] Zhu Zhijian, Zao Remu, Ni Jiaoti.Autocontrol variable voltage frequency type of irrigation Feri- gation device[J].Transaction of the CSAE,2005,21(9):94-97.
[5] 田思庆,曹 宇,魏 强,等. 基于模糊控制的智能滴灌控制系统设计[J]. 节水灌溉,2017,(6):101-104.
[6] 谢宋和,甘 勇. 单片机模糊控制系统设计与应用实例[M]. 北京: 电子工业出版社, 1999.
[7] 张育斌,魏正英,马胜利,等.灰色预测模糊PID灌溉控制技术开发[J].中国农村水利水电,2016,(2):5-8.
[8] 谢仕宏.MATLAB控制系统动态仿真实例教程[M]. 北京:化学工业出版社, 2008.
[9] 陈年来,黄海霞,高慧娟,等.甜瓜叶片气体交换特性和幼苗生长对土壤水分和大气湿度的响应[J].兰州大学学报(自然科学版),2009,45(4):73-77.
[10] 孙增圻,邓志东,张再兴.智能控制理论与技术[M].北京:清华大学出版社,2011.
[11] 梁月云,崔天时,何亚非. 温室节水灌溉系统模糊控制器设计及MATLAB仿真[J]. 农机化研究,2014,36(6):202-205,209.
[12] 李 健,王冬青,王丽美. 模糊PID控制器设计及MATLAB仿真[J]. 工业控制计算机,2011,24(5):56-57,95.
[13] 徐立鸿. 一种新型温室滴灌控制算法[C]∥ 中国农业工程学会.中国农业工程学会第七次全国会员代表大会及学术年会论文集.中国农业工程学会,2004:3.
猜你喜欢
农业工程技术(2022年1期)2022-04-19
云南农业(2021年9期)2021-09-24
云南农业(2021年8期)2021-09-06
成都信息工程大学学报(2021年6期)2021-02-12
天津农林科技(2020年3期)2020-08-13
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
电子制作(2019年16期)2019-09-27
电子制作(2019年15期)2019-08-27
英语文摘(2019年2期)2019-03-30
电子制作(2016年21期)2016-05-17
