2BFJ- 24型小麦精量播种变量施肥机设计与试验
2018-05-31 03:15李倩文苑严伟邱兆美周利明贺智涛
农业机械学报 2018年5期
金 鑫 李倩文 苑严伟 邱兆美 周利明 贺智涛
(1.河南科技大学农业装备工程学院, 洛阳 471003; 2.机械装备先进制造河南省协同创新中心, 洛阳 471003;3.中国农业机械化科学研究院, 北京 100083)
0 引言
种肥同播是指将种子和缓释肥按照一定间隔分层播入田间的一种种植农艺模式,实现了农机与农艺结合、良种与良肥配套,相对传统耕作模式能有效提升肥料利用率、稳产增产[1-3],已成为我国中原地区小麦机械化生产技术研究的热点之一[4]。目前我国已在河南、山东、河北等地开展了一系列冬小麦种肥同播试验示范,取得了较好的应用成果。但作业过程中发现,由于缺乏种肥播施状态监测、排肥变速调节及故障信息监测等质量控制技术,易产生播施精度不高、田间施肥量相对过大、作业可靠性难以保证等问题。鉴于此,研究播种与施肥质量实时监控技术并集成整机应用显得尤为迫切。
国外相关技术的研究始于20世纪50年代,到目前已针对稻麦、玉米、大豆等大田作物开发出图像检测、光谱/光电传感、电容传感、电液控制等专用种肥播施监测与变量控制的技术,形成了较为完善的系列装备[5-7],应用较为广泛的有John Deere公司JD- 1820型气力式变量施肥播种机,配备有播种质量监测传感器、液压马达驱动控制器、Seed Star监视仪等一系列检测、传输与信号处理设备,能够检测到漏播、断条等现象,在监视仪器上进行图形化统计与报警,通过控制液压电液比例阀开度,实现液压马达驱动施肥量变量调节;美国CASE公司生产的ST820型气送式大豆变量施肥播种机,集成有AFS处方图软件,可将生成的处方文件存入外接存储卡,作业时将存储卡中数据导入变量控制器,实现机器自动变量施肥播种。
国内在引进、消化和吸收国外研究成果基础上,开展了一些适合我国国情的精量播种与变量施肥技术研究,代表性成果有[8-19]:中国农业机械化科学研究院研制的2F- 6- BP1型变量配肥施肥机,具有现场检测控制器模块,根据土壤N、P、K含量不同,按需进行配肥施肥;中国农业大学研制的稻茬小麦宽幅精量少耕播种机,提出了“种- 肥- 种”宽幅精量播种和带状旋耕相结合的防堵方法,减少了对入土部件的缠绕堵塞;北京市农林科学院研制的2F- VRT1型变量施肥机,可根据用户设置施肥量结合GPS位置信号及机组速度信号,自动调整排肥轴驱动系统转速,实现实时变量作业;南京农业大学设计的冬小麦变量施肥机控制系统,采用近地光谱探测与模糊PID控制技术相结合,实现了追肥控制精度90%以上;中农机2BMG- 20型玉米变量免耕播种机,突破了种肥流量信息实时反馈的闭环控制技术。而对于适合我国农业发展模式的小麦种肥同播作业装备与过程质量监控技术的集成研究与创新,还相对缺乏,应用示范效应不明显。
本文在现有研究的基础上,根据中原地区冬小麦适度规模种植种肥同播作业特点,融合车载传感器、CAN总线传输、PIC控制及PC终端等技术,设计冬小麦精量播种施肥机,旨在实现小麦种肥同播的同时能够实时监测种子漏播与肥料堵塞情况,并按定位信息和处方信息的要求进行变量施肥。
1 精量播种变量施肥机系统设计
2BFJ- 24型精量播种变量施肥机系统可分为播种(施肥)机械结构部分、种肥监测与变量控制系统、软件系统。
1.1 机械结构设计
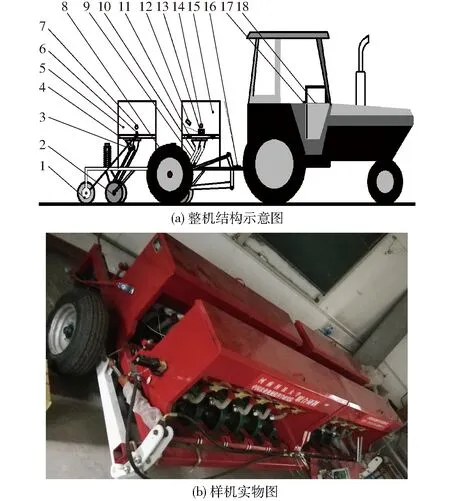
图1 2BFJ- 24型小麦精量播种变量施肥机Fig.1 2BFJ- 24 type variable fertilizer and precision wheat seed sowing machine1.地轮 2.播种开沟圆盘 3.漏播检测传感器 4.排种管 5.种箱 6.霍尔测速传感器 7.排种轴 8.限深轮 9.堵塞检测传感器 10.排肥管 11.肥箱压力传感器 12.缺肥检测传感器 13.伺服电机 14.排肥轴 15.肥箱 16.施肥质量控制器17.GPS模块 18.车载计算机
2BFJ- 24型精量播种变量施肥机机械结构由种箱、肥料箱、缺肥检测传感器、槽轮式排种(肥)器、伺服电机、肥箱压力传感器、排种(肥)管、种子漏播检测传感器、肥料堵塞检测传感器、限深轮、地轮等组成,如图1所示。整机采用“2+2”对称式结构设计,即由两组播种和施肥单元组成,在机组前进方向施肥单元在前、播种单元在后,种箱和肥箱平行排列,高度相同、间距40 cm,落种和落肥位置相距约95 cm,结构紧凑、利于整机传动布局;在垂直机组前进方向两组播种和施肥单元对称分布,左右两侧各有1个种箱和肥箱,每个种箱下设有12个排种口,12个排种槽轮通过一根排种轴带动,动力由独立的钢制笼式地轮(土壤附着力大,减少打滑)提供;每个肥箱下设有6个排肥口,6个排肥槽轮通过1根六边形施肥传动轴带动,传动轴与伺服电机连接,采用三菱HC- SFS52K型伺服电机,额定功率(额定转速)500 W(3 500 r/min),额定扭矩1.35 N·m;参考文献[12],施肥传动轴正常排肥需提供大于36 N·m扭矩,因此在伺服电机输出端连接速比为1∶40的减速机。在垂直机组前进方向落种位置间距15 cm,落种与落肥位置间距7.5 cm,播种深度3~5 cm可调,施肥深度8~10 cm可调(图2);整机24行播种与12行施肥,作业幅宽约3.5 m,满足适度规模作业冬小麦分层种肥同播农艺要求,防止烧苗。将AC220V交流电由XNT- 1000W逆变器将拖拉机电能转换获取整机电力;用于种肥播施深度控制的限深轮位于机器两侧,由独立的液压系统控制与拖拉机后置液压装置对接。

图2 机器落种落肥示意图Fig.2 Sketch of wheat seed and fertilizer particle seeding
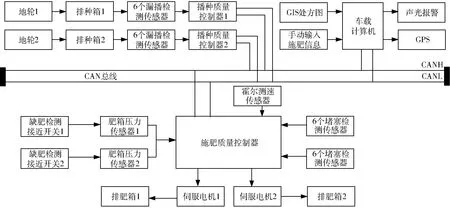
图3 精量播种变量施肥机系统结构框图Fig.3 Structure diagram of variable fertilizer and precision wheat seed sowing machine system
1.2 系统方案设计
图3是精量播种变量施肥机系统总体结构图,系统主要由施肥(播种)执行部件、传感器模块、控制器模块、GPS模块及车载计算机终端组成。传感器模块包括种子漏播检测传感器、肥料堵塞检测传感器、测速传感器、肥箱压力检测传感器及缺肥检测传感器;其中,两组播种单元(每组12行)在排种管上端30 mm处以间隔2行各布置6个漏播检测传感器(小麦排种口间距较小为12 cm,近似认为两相临排种口状态相同),两组施肥单元(每组6行)在每个排肥管下端口都布置肥料堵塞检测传感器,1个霍尔测速传感器固定在1个种箱外侧用于测量地轮与排种轴间的万向传动轴转速,2个肥箱的外侧下端各支撑2个BK- 2E型压力传感器(量程200 kg),各肥箱的内侧通过两个连接点直接固定于机架上,连接点位置与压力传感器安装点呈对称分布,此时每个肥箱的4个连接点受力基本一致,则肥箱质量为
m=2k(V1+V2)
(1)
式中m——肥箱质量,kg
k——传感器输出电压- 质量比例系数,kg/mV
V1——肥箱压力传感器1输出信号,mV
V2——肥箱压力传感器2输出信号,mV
根据箱内肥料质量变化,可由控制系统指导施肥作业;2个肥箱底部距排肥口30 mm处,均布置有一个电容式缺肥检测传感器。控制器模块包括2个播种质量控制器(两组播种单元各1个)和1个施肥质量控制器,分别用于采集处理种子漏播、肥料堵塞与变量施肥数据信息。
该系统各模块通过CAN总线连接,并根据预先制定的通讯协议协调工作,传感器模块将种子漏播、肥料堵塞、地轮速度、肥箱质量及电动机转速等电压检测信号,经控制器模块整形放大、滤波降噪及模数转换后,传输到车载计算机;车载计算机融合相关信息和决策算法,为变量施肥提供控制策略与指令,并显示漏播和堵塞报警信息,实现精量播种和变量施肥目的。
2 种肥监测与变量控制技术
2.1 种子漏播监测系统
种子漏播监测系统主要由光电传感器、播种质量控制器、车载计算机监控终端等组成,在小麦播种过程中具有漏播监测与声光报警功能,系统结构框图如图4所示。两组播种单元中各6个光电传感器的检测信号分别经2个播种质量控制器由CAN总线传输至车载计算机。
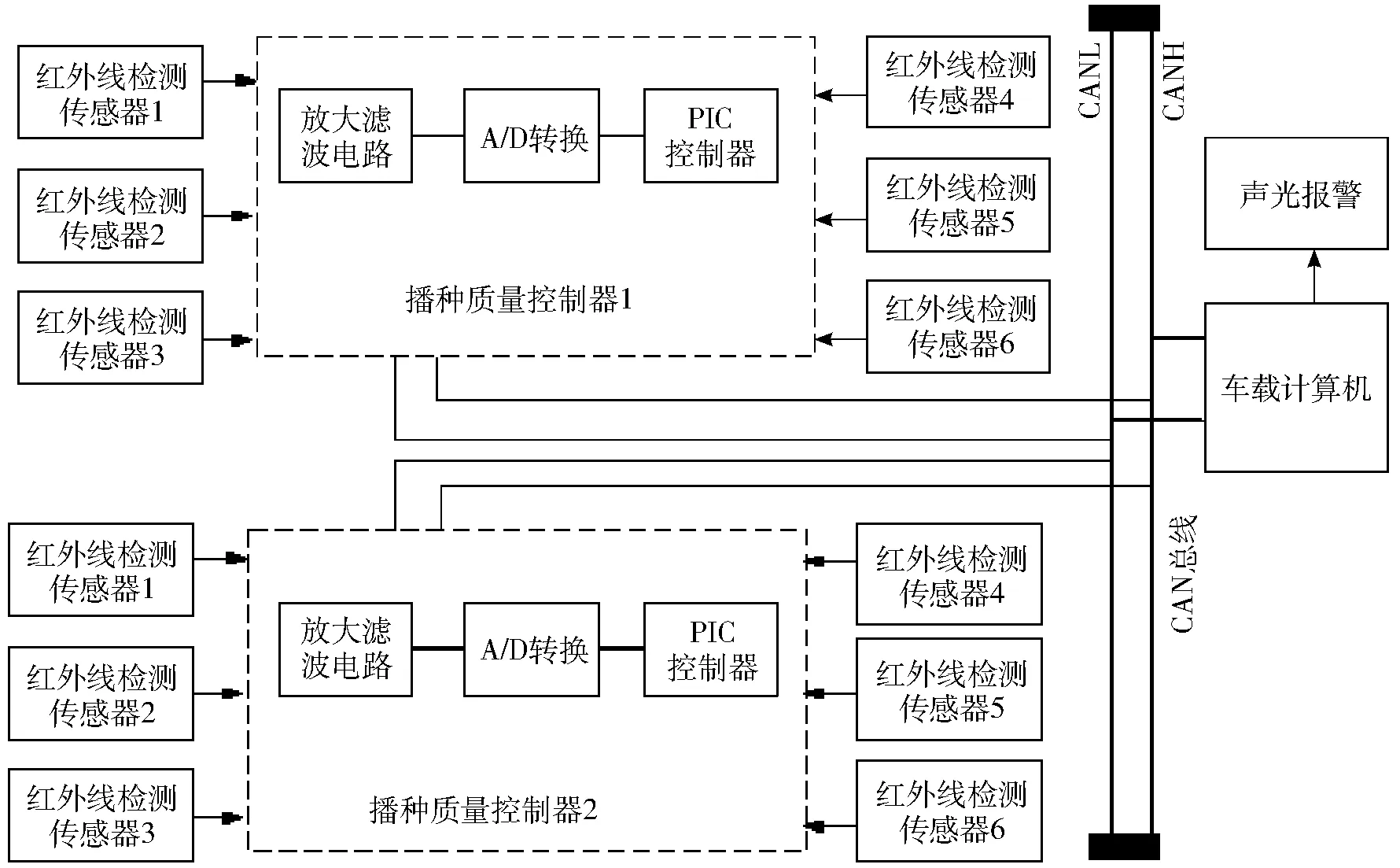
图4 种子漏播监测系统结构框图Fig.4 Structure diagram of seed leakage monitoring system
2.1.1漏播检测传感器
(1)检测原理
种子漏播检测是基于光电检测原理,将种子下落信号转换为电脉冲信号,经单片机处理后获取漏播信息。具体实施:在排种管壁采用对射式红外光电传感器,一侧为红外发射端,另一侧为信号接收端,接收端采用RC电路[20];当有种子通过排种管时,发射端发出的红外信号受到种子遮挡,接收端输出电压增大;通过对接收端电压信号的采集与处理,来实现播种状态的监测。
漏播检测传感器采用对射式结构,主要由红外发射端、信号接收端、数据线及电源线等组成,结构如图5a所示。传感器安装前在排种管上端距排种口30 mm处相对开孔(图5c),将发射端和接收端置于孔内并对齐,壳体露于排种管外壁,外侧再由固定带紧固;避免了灰尘、泥土对信号传递的影响。
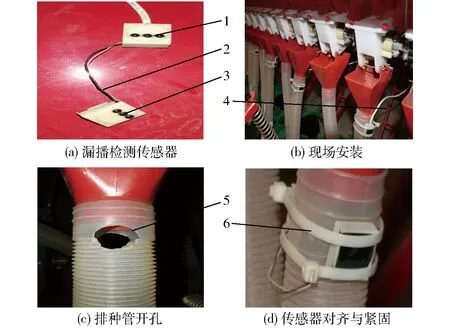
图5 种子漏播检测传感器及安装示意图Fig.5 Diagrams of seed leakage detection sensor and installation1.信号接收端 2.电源线 3.红外发射端 4.数据线 5.开孔 6.紧固带
2.1.2播种质量控制器
播种质量控制器的主要功能是采集传感器检测信号,并实现信号整形、滤波放大与数模转换。本文采用美国微芯科技的PIC16F1779单片机,具有4个捕捉/比较/脉宽调制模块、3个增强型捕捉/比较/脉宽调制模块、1个数模转换器模块和ECAN模块等。利用其信号捕捉模式,可捕捉种子通过传感器检测区域的脉冲信号,进行放大与A/D处理,从而实现6路播种信号的实时监测。经检测小麦种子通过排种管时产生的脉冲宽度为0.8~6 ms,信号捕捉处理分辨率满足该机播种速率要求。数据传输采用CAN总线接口,由协议模块完成数据处理并通过总线将数据传至车载计算机。
2.1.3车载计算机监控终端(播种部分)
车载计算机监控终端对播种部分主要完成数据的解算、漏播评判、显示与声光报警等功能。车载计算机集成有显示屏、声光报警驱动、多路漏播报警指示灯及测速传感数据,可对多路排种管漏播情况进行高亮显示和声音报警;当无测速传感数据时,使报警系统停止,避免停机频繁报警。
2.2 肥料堵塞监测系统
肥料堵塞监测系统主要由电容传感器、施肥质量控制器、车载计算机监控终端等组成,在施肥过程中具有肥料堵塞监测与声光报警功能,系统结构框图如图6所示。12个电容传感器检测信号经施肥质量控制器由CAN总线传输至车载计算机。

图6 肥料堵塞监测系统结构框图Fig.6 Structure diagram of fertilizer blockage monitoring system
2.2.1堵塞检测传感器
(1)检测原理
当前临床中治疗脑胶质瘤的方式主要是手术,也是治疗该疾病的首选方式。开放式手术需要进行开颅操作,手术时受到多方面因素的影响,创口大,容易导致术后细菌感染,所以开放式手术在治疗的时候无法获得预期的效果[1]。现在临床中的医疗手段不断优化,微创手术在手术治疗中有着非常好的效果,临床中得到了广泛的应用。此次我院就微创手术和传统开放手术效果进行了对比分析,现有以下报道。
肥料堵塞检测是基于变介电常数电容检测原理,将肥料颗粒堆积所引起的电容变化转换为电压信号,经单片机处理后获取堵塞信息。具体实施:在排肥管末端采用贴片式电容传感器,调节阈值使其高于肥料颗粒正常通过排肥管时信号强度;当发生肥料堵塞时,传感器内介质相对介电常数有较大变化导致电容量变化,通过测量电路可将电容变化转换为电信号输出。电容决定公式为
(2)
式中ε0——真空介电常数,F/m
ε1——电容极板间介质相对介电常数,F/m
S——两电容极板正对面积,mm2
d——两电容极板间距离,mm
(2) 传感器结构及安装
肥料堵塞检测传感器由绝缘筒、上下两电容极板、测量电路板、信号线、电源线及壳体等组成,结构如图7a所示。传感器绝缘筒(外径40 mm,内径36 mm)上端口与排肥管下端口对接,上下两电容极板(薄铜片)对称环绕绝缘筒外壁,由壳体将信号线、测量电路板及电容极板封装于绝缘筒上端口以下50 mm部位,避免泥灰干扰;壳体下端口对应两开沟圆盘正上方,便于准确落肥。
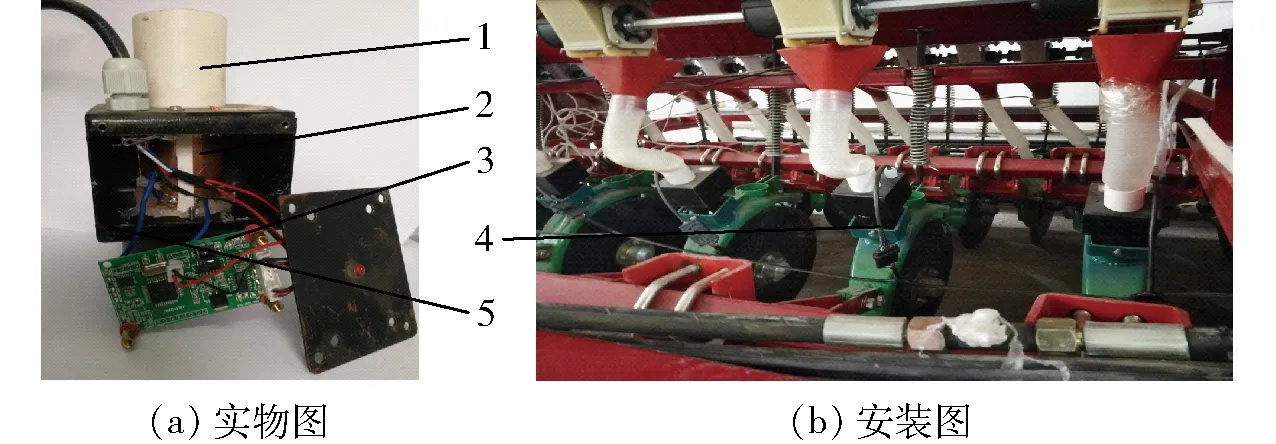
图7 肥料堵塞检测传感器Fig.7 Installation of fertilizer blockage monitoring sensor1.绝缘筒 2.电容极板 3.测量电路板 4.信号线 5.壳体
2.2.2施肥质量控制器(肥料堵塞部分)
施肥质量控制器对肥料堵塞部分主要功能是将电容传感器检测电压信号进行整形、降噪、放大与D/A转换,并由总线协议模块对接CAN总线输出。控制器具体结构与模块功能见2.3.1节,拓展了12个PWM通道并集成AD7746转换模块,用于捕捉传感器检测区域脉冲信号,进行滤波放大与A/D转换,实现12路落肥信号的实时监测。
2.2.3车载计算机监控终端(肥料堵塞部分)
车载计算机监控终端对肥料堵塞部分主要完成数据解算、堵塞评判、显示与声光报警等功能。车载计算机集成有屏显、声光报警驱动、多路堵塞报警指示灯,可实现多路排肥管肥料堵塞情况的实时声音报警与显示。
2.3 变量施肥控制系统
变量施肥控制系统是该机的核心部分,主要由测速传感器、缺肥检测传感器、肥箱压力传感器、排肥伺服电机、施肥质量控制器和车载计算机终端等组成,完成车载传感器信号采集、施肥作业控制及工况数据显示与存储。变量施肥控制系统结构原理如图8所示,由施肥质量控制器采集测速传感器及两组排肥单元的缺肥(采用电容式接近开关检测)和肥箱压力传感器信号,经放大、降噪处理与A/D转换后,通过CAN总线传输至车载计算机;车载计算机根据信息反馈结合GPS位置与处方图,通过PID控制算法,生成施肥策略,并向施肥质量控制器实时发送施肥指令;控制器通过D/A转换输出模拟控制信号,对两组排肥伺服电机进行转速控制,进而实现变量施肥目的。
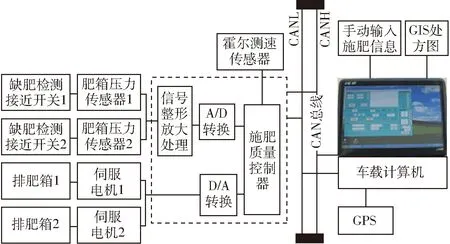
图8 变量施肥控制系统结构框图Fig.8 Structure diagram of variable fertilizer control system
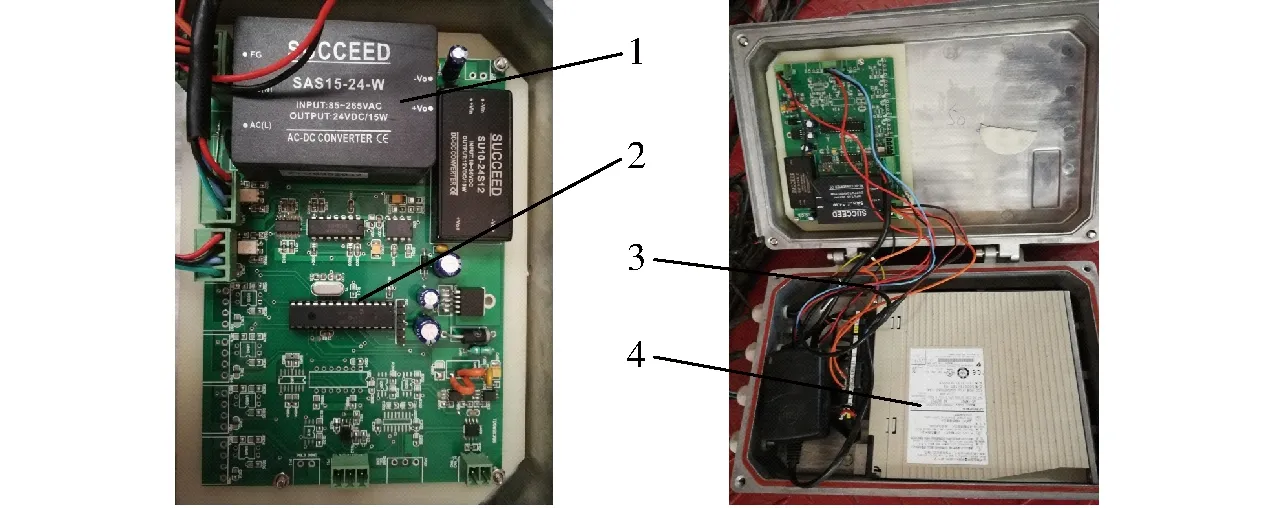
图9 施肥质量控制器Fig.9 Controller of fertilizer quality1.电源 2.PIC单片机 3.数据线 4.伺服电机驱动器
2.3.1施肥质量控制器
施肥质量控制器有变量施肥信息处理和肥料堵塞信息处理两大功能,对于变量施肥主要完成肥箱压力传感器、测速传感器和排肥伺服电机转速信息的采集,并通过CAN总线与车载计算机进行通讯,根据计算机指令来控制电机工作,实物如图9所示。控制器芯片采用美国微芯科技的PIC18F2580单片机,具有SPI、USART、AD及ECAN等外围模块,通过SPI总线与16位无丢失代码转换模块AD7706(0.003%非线性)通讯,实现数模转换;整个控制器由单片机、伺服电机驱动器及相关模块串联组成,与车载计算机之间采用CAN总线组网连接,具有布线简单、通讯可靠性高等优点。
2.3.2测速传感器
测速传感器利用霍尔原理,通过检测地轮与排种轴之间万向传动轴的转速,可实现对机器前进速度检测与排种动力情况监测,现场安装如图10所示。采用霍尔式测速传感器,固定于一个排种箱外侧,在万向传动轴上安装磁铁,传感器前端正对磁铁、间距5 mm。当地轮转动带动万向传动轴旋转时,磁铁接近传感器便产生脉冲信号,通过霍尔器件电路输出至施肥质量控制器,进行计数存储。地轮线速度vD为
vD=2πriN/T
(3)
式中r——地轮半径,m
i——地轮与万向传动轴的传动比
N——脉冲个数
T——计时周期,s
考虑到地轮打滑,测速数据演算实际车速时,vC=δvD,δ为滑移系数,本文取δ=0.95。

图10 测速传感器安装图Fig.10 Installation diagram of velocity sensor1.种箱 2.万向轴 3.霍尔测速传感器 4.磁铁
2.3.3车载计算机终端
车载计算机是针对2BFJ- 24型精量播种变量施肥机设计的一款集成工控与显示的多功能PC一体机,可实现种子漏播、肥料堵塞的判定与报警,以及变量施肥决策功能。图11为研制的车载计算机,具备人机交互接口,可进行作业参数设置与串口连接,显示作业处方图、排肥电动机转速、作业面积、种子漏播与肥料堵塞等信息,负责变量施肥控制策略的输出,存储相关作业过程数据。车载计算机集成了高精度GPS定位模块,可获得当前机器的位置信息;集成武汉吉阳光电GY8507 USB- CAN通讯模块,具有00RLT8111C 10/100/1000Mb/s网络接口、RS232/485和USB2.0等多设备接口,方便与播种质量控制器和施肥质量控制器进行组网连接。车载计算机采用VI- PAD1000型工业触摸屏、工业固态硬盘,屏显丰富、操作便捷。

图11 车载计算机Fig.11 Truck-mounted computer
3 软件系统设计
精量播种变量施肥系统软件包括传感器数据采集显示、机器位置信息解算、漏播显示、堵塞显示、处方图数据加载、变量施肥决策、数据存储及串口设置等模块功能。机器位置信息是通过GPS模块提供的NEMA0183协议信息,解算出机器当前的位置坐标;数据采集模块实现种子和肥料流量、机器前进速度、排肥电动机转速、GPS等传感器信息的采集。变量施肥决策系统根据施肥处方图结合当前机器位置信息,生成施肥决策,实时将施肥控制信息发送至施肥质量控制器,实现变量按需施肥。种子漏播、肥料堵塞及变量施肥作业参数数据实时显示,车载计算机控制软件程序由Visual Basic 6.0语言编写,操作界面如图12所示。

图12 软件操作界面Fig.12 Software operation interface
上位机系统软件通过调用GY8507模块提供的USBCAN库文件中的CAN操作函数实现基于CAN总线的数据采集与显示。为提高传感器及定位信息采集的准确性,采用滑动中值滤波算法对采集的信息进行预处理,尽可能消除现场干扰对数据的影响。
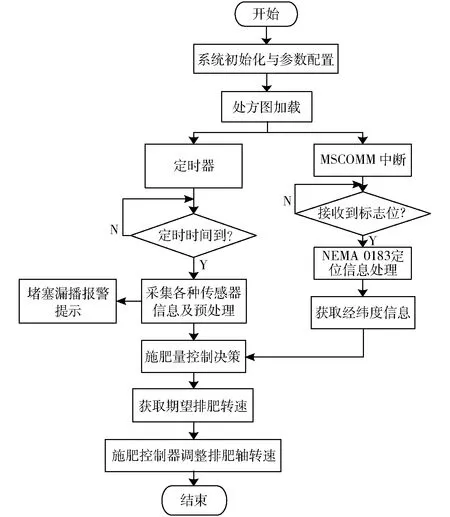
图13 软件系统程序流程Fig.13 Program flow diagram of software system
系统首先进行初始化配置,包括CAN总线通信速率及模式设置、GPS接收串口参数设置以及施肥量作业参数设置等,并进行处方图加载;之后启动数据接收定时器,通过CAN总线接收称量传感器、肥料堵塞传感器、漏播检测传感器及前进速度传感器信息并进行处理,完成堵塞漏播报警,同时获取肥箱质量反馈信息及作业速度;另外系统通过调用MSCOMM控件中断函数获取GPS定位信息,结合处方图进行位置匹配,得到作业点处的期望施肥量;系统根据期望施肥量、前进速度、肥箱质量、施肥作业幅宽等进行控制决策,得到期望排肥转速,并通过CAN总线发送给施肥质量控制器,调整排肥轴转速,完成施肥量在线调整。软件程序流程如图13所示。
4 田间试验
为了对2BFJ- 24型小麦精量播种变量施肥机的种肥监测准确性及变量施肥可靠性进行检测,2017年10月在洛阳市伊滨区农场由东方红RD- 1504F型拖拉机牵引进行了田间作业试验,试验现场如图14所示。试验地块面积选取5 hm2,试验种子为科农199小麦种子,肥料采用史丹利三安“18- 18- 18”复合肥;事先人工采集试验地土样,获取该地块养分信息,再按照施肥指导量生成处方图,加载于车载计算机;试验中机器常规作业速度5 km/h,单轮试验取试验地块2次往返距离,试验距离600 m,完成整机种子漏播率监测、排肥管堵塞及变量施肥精度等试验。

图14 2BFJ- 24型小麦精量播种变量施肥机田间试验Fig.14 Field experiment of 2BFJ- 24 type machine
4.1 漏播监测精度试验
漏播监测试验采取人为制造漏播故障的方式进行,当作业速度达到设定值后,启动漏播监控系统,记录车载机算机显示的漏播报警次数,并采用人工查看播种带,统计播种作业实际断条情况,记录实际漏播次数,为验证作业速度对漏播检测的影响,设定作业速度分别为5 km/h和7 km/h。每个速度条件下重复试验5次,各次试验数据结果见表1。从表中可以看出,在两种作业速度条件下该机漏播监测系统种子漏播率监测相对误差均小于9%,准确率达91%以上,根据测试数据,作业速度对漏播检测精度无明显影响。检查实际下种情况发现,漏播未报警是因为持续时间小于报警延迟时间设置,可通过多次检测标定调整合适延时设置。
4.2 肥料堵塞报警试验
肥料堵塞报警试验采取人工干预落肥口堵塞的方式进行,在机组各部件正常运行情况下,启动肥料堵塞监测系统,记录车载机算机显示的堵塞报警次数及传感器指示灯亮起次数,并统计人工干预堵塞次数。重复试验8次,各次试验结果见表2。从表中可以看出,堵塞报警准确率达98%以上,误报的主要来源是漏报,可通过调节介质型电容传感器的阈值来减少漏报情况。
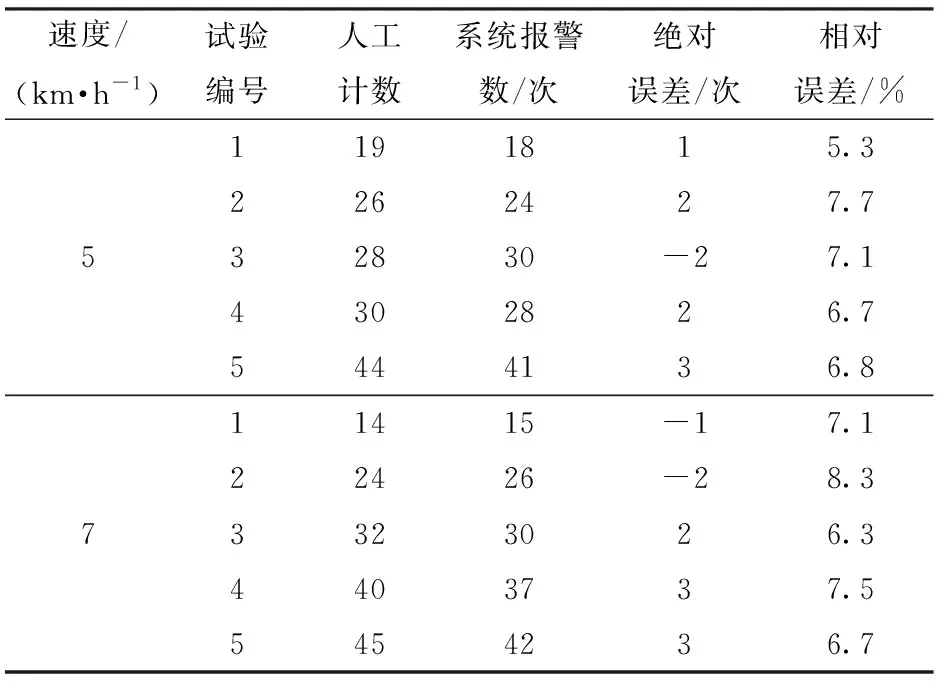
表1 种子漏播率试验数据Tab.1 Test data of seedmissing rate
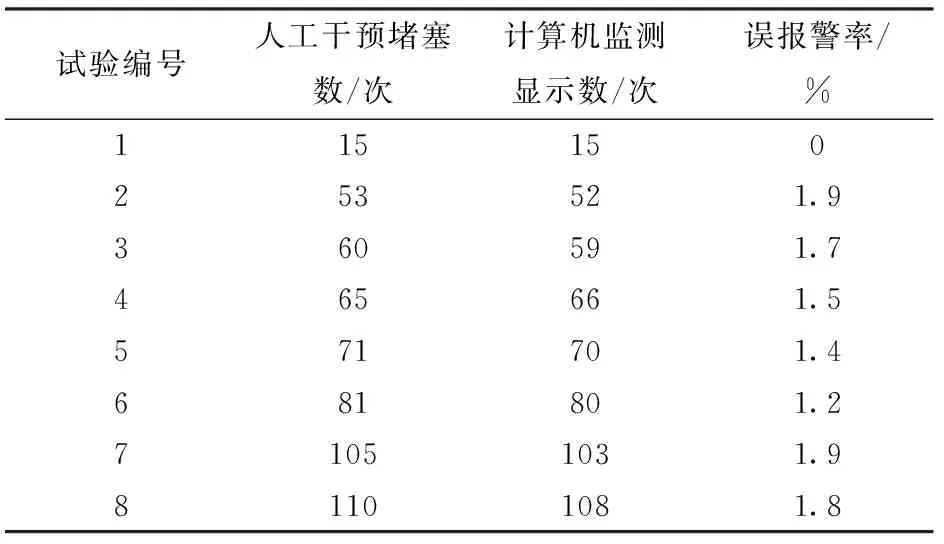
表2 肥料堵塞报警试验数据Tab.2 Test data of fertilizer blockage monitoring
4.3 变量施肥精度试验
试验区域随机选择,实际施肥质量采用塑料袋接取称量方式获得。进行6组试验,分别记录车载计算机显示的理论施肥量、施肥面积、目标施肥质量等数据,并记录实际施肥质量,数据统计结果见表3。由表3可知,变量施肥系统控制误差小于4%,准确率超过96%,满足精准施肥要求。经农场科技人员测算,使用该机进行播种施肥作业,相对于传统播施作业,每公顷地节约化肥近20 kg,降低成本约70元,具有较好的经济效益。

表3 变量施肥田间试验数据Tab.3 Experiment results of automatic conveying forvegetable potted seedlings
5 结论
(1)集成车载传感器、CAN总线传输、PIC控制及PC终端等技术,设计了2BFJ- 24型冬小麦精量播种变量施肥机,该机主要由槽轮式排种排肥机构、漏播监测系统、堵塞监测系统、变量施肥控制系统及车载计算机终端组成,整机作业幅宽3.2 m,可实现24行播种与12行施肥同步作业,并具备种子漏播、肥料堵塞实时声光报警与按需变量施肥功能。
(2)基于光电检测与介质型电容传感技术,分别将对射式红外传感器、变介电常数电容传感器元件封装于排种管上端内与排肥管下端口,可实现种、肥流量信号的实时监测,且防尘挡泥;变量施肥采用施肥质量控制器采集肥箱压力传感器获取的肥料质量变化数据,解算出实际施肥量和肥料流量(作为反馈量),并结合地块处方图和机器GPS定位信息确定目标施肥量,以速度控制方式驱动排肥伺服电机,构成闭环反馈PID控制系统,具有较好的鲁棒性。
(3)田间试验结果表明:该机种子漏播率监测相对误差小于9%,肥料堵塞报警准确率超过98%,变量施肥控制精度达96%以上,能够对冬小麦播种施肥过程的作业质量进行有效监测与控制,降低了生产成本。
1 张同华,刘倩.农机农艺结合技术对提高小麦机播质量的影响[J].南方农机,2017, 48(14): 64.
2 CHEN Dongyi, ZI Fangju, CHEN Xiaoren, et al. The agricultural technology for manuring and sowing simultaneously applied to summer corn “Jinzhengda”[J]. Agricultural Science & Technology, 2017, 18(1): 110-113.
3 SINGH A. Evaluation of wheat sowing technologies under paddy residue conditions[J]. International Journal of Forestry and Crop Improvement, 2015, 6(1): 43-48.
4 于建军.小麦玉米机械化生产配套种植模式与播种技术试验研究[D].郑州:河南农业大学,2016.
YU Jianjun. The matching planting pattern of mechanized production of wheat and maize and the experiment research in seeding[D]. Zhengzhou: Henan Agricultural University, 2016.(in Chinese)
5 NAVID H, EBRAHIMIAN S, GASSEMZADEH H R, et al. Laboratory evaluation of seed metering device using image processing method[J]. Australian Journal of Agricultural Engineering, 2011(2): 1-4.
6 BOUROUBI Y, TREMBLAY N, VOGNEAULT P, et al. Fuzzy logic approach for spatially variable nitrogen fertilization of corn based on soil, crop and precipitation information[J]. Computational Science and Its Application, 2011, 6782: 356-368.
7 YAZGI A,DEGIRMENCIOGLU A. Optimisation of the seed spacing uniformity performance of a vacuum-type precision seeder using response surface methodology[J]. Biosystems Engineering, 2007, 97(3): 347-356.
8 LU Caiyun, FU Weiqiang, ZHAO Chunjiang, et al. Design and experiment on real-time monitoring system of wheat seeding[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(2): 32-40.
9 YANG Li, ZHANG Rui, LIU Quanwei, et al. Row cleaner and depth control unit improving sowing performance of maize no-till precision planter[J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(17): 18-23.
10 DU Ruicheng, GONG Bingcai, LIU Ningning, et al. Design and experiment on intelligent fuzzy monitoring system for corn planters[J]. International Journal of Agricultural and Biological Engineering, 2013, 6(3): 11-18.
11 周利明,王书茂,张小超,等.基于电容信号的玉米播种机排种性能监测系统[J].农业工程学报,2012, 28(13): 16-21.
ZHOU Liming, WANG Shumao, ZHANG Xiaochao, et al. Seed monitoring system for com planter based on capacitance signal[J]. Transactions of the Chinese Society of Agricultural Engineering,2012,28(13): 16-21. (in Chinese)
12 伟利国,张小超,苑严伟,等.2F- 6- BP1型变量配肥施肥机的研制与试验[J].农业工程学报,2012, 28(7): 14-18.
WEI Liguo, ZHANG Xiaochao, YUAN Yanwei, et al. Design and experiment of 2F- 6- BP1 variable rate assorted fertilizer applicator[J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(7): 14-18. (in Chinese)
13 胡红,李洪文,李传友,等. 稻茬田小麦宽幅精量少耕播种机的设计与试验[J].农业工程学报,2016, 32(4): 24-32.
HU Hong, LI Hongwen, LI Chuanyou, et al. Design and experiment of broad width and precision minimal tillage wheat planter in rice stubble field[J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(4): 24-32. (in Chinese)
14 施印炎,陈满,汪小旵,等.稻麦精准变量施肥机排肥性能分析与试验[J/OL].农业机械学报,2017, 48(7): 97-103.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170712&flag=1&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2017.07.012.
SHI Yinyan, CHEN Man, WANG Xiaochan, et al. Analysis and experiment of fertilizing performance for precision fertilizer applicator in rice and wheat fields[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(7): 97-103.(in Chinese)
15 汪小旵,陈满,孙国祥,等.冬小麦变量施肥机控制系统的设计与试验[J].农业工程学报,2015, 31(增刊2): 88-92.
WANG Xiaochan, CHEN Man, SUN Guoxiang, et al. Design and test of control system on variable fertilizer applicator for winter wheat[J]. Transactions of the Chinese Society of Agricultural Engineering,2015, 31(Supp.2): 88-92. (in Chinese)
16 宋鹏,张俊雄,李伟,等.精密播种机工作性能实时监测系统[J].农业机械学报,201l, 42(2): 71-74.
SONG Peng, ZHANG Junxiong, LI Wei, et al. Real-time monitoring system for accuracy of precision seeder[J]. Transactions of the Chinese Society for Agricultural Machinery, 201l, 42(2): 71-74. (in Chinese)
17 李玉环,孟鹏祥,耿端阳,等.玉米播种深度智能调控系统研究[J/OL].农业机械学报,2016, 47(增刊): 62-68.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2016s010&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.S0.010.
LI Yuhuan, MENG Pengxiang, GENG Duanyang, et al. Intelligent system for adjusting and controlling corn seeding depth[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(Supp.): 62-68. (in Chinese)
18 和贤桃,郝永亮,赵东岳,等.玉米精量排种器排种质量自动检测仪设计与试验[J/OL].农业机械学报,2016, 47(10): 19-26.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20161003&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.10001298.2016.10.003.
HE Xiantao, HAO Yongliang, ZHAO Dongyue, et al. Design and experiment of testing instrument for maize precision seed meter’s performance detection[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(10): 19-26. (in Chinese)
19 陈满,施印炎,汪小旵,等.冬小麦精准追肥机专家决策系统[J/OL].农业机械学报,2015, 46(7): 17-22. http:∥www.j-csam.org/ch/reader/view_abstract.aspx?file_no=20150703&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.07.003.
CHEN Man, SHI Yinyan, WANG Xiaochan, et al. Expert decision system of variable nitrogen application in winter wheat[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 17-22. (in Chinese)
20 邱关源,罗先觉.电路[M].北京:高等教育出版社,2006.
猜你喜欢
农业工程学报(2022年6期)2022-06-27
汽车实用技术(2022年10期)2022-06-09
农机科技推广(2021年3期)2021-08-02
铁道通信信号(2020年8期)2020-02-06
中国化肥信息(2019年8期)2019-10-25
中国化肥信息(2019年7期)2019-08-26
汽车维修与保养(2019年3期)2019-06-19
铁道通信信号(2019年3期)2019-04-25
中国化肥信息(2019年3期)2019-04-25
今日农业(2019年15期)2019-01-03