智慧系泊在智能港中的应用探索
2018-06-05 09:12倪文利
新教育时代电子杂志(教师版) 2018年4期
倪文利
(山东交通职业学院 山东潍坊 261000)
一、“智慧系泊”提出的背景
目前,以上海洋山港为代表的智慧港在规划建设中,港口物物之间的互联,工作人员或客户可以随时查看港口集装箱、机械设备、车辆等状态、位置等级港口业务的运维系统基本建立,在许多领域的系统都实现了机器换人,但在船舶系泊操作的领域,人工的使用率依然很高,船舶进出港时人工系泊操作需全船人员三分之二在船首船尾作业,而且潜在风险很高,出现过很多人员伤亡的案例,对安全生产带来严重威胁。同时人工系泊的效率较低,不利于船舶经济性能的提升。因此依托信息化技术,融合智能交通理念,构建高度信息化、高度自动化和高度集成化的“智慧系泊”系统在港口建设中显得极为迫切,该机器换人系统也会成为智慧港的重要组成部分,填补港口系泊领域的国际空白。[1]
二、“智慧系泊”的需求分析
1.船员市场供给侧现状使得系泊操作人员紧缺
近年来,受国际经济金融危机影响,国际航运市场总体表现低迷,直接导致航运企业缩减人才需求计划。从船员市场供给看,管理级船员不足,操作级船员过剩,支持级船员紧缺。港口的系泊操作,主要依靠管理级船员的指挥和支持级船员的操作,因此船员市场供给侧的不平衡,使得人工系泊操作人手尤其是有经验的人员较为紧缺。[2]
2.常规系泊作业系统与人工系泊存在的问题
(1)常规系泊作业系统组成。船舶系泊装置是船舶靠离码头、系离浮筒、傍靠他船或拖带时,用以带缆、绞缆的设备统称为系泊设备。系泊设备由系船缆、导缆装置、挽缆装置、绞缆机械、系缆卷车及属具组成。绞缆机械又称系缆绞车,用于绞收缆绳。一般情况来讲,船上装有七台绞车:船艏3台,船艉4台。绞车的结构规定能把两根系索分別卷在卷筒的两侧,这样便能保证向任何一舷输送系索。因此,在每台绞车附近,设有两个带六角滾轮的导缆孔,以免系索与船体结构发生摩擦。船舶系缆前的全部准备工作是绞车测试,缆绳预处理。
(2)缆绳作用及受力分析:艏缆是靠泊时,由船艏最前端向前出缆,向前带到码头上,一则将船艏部分靠紧码头,同时,防止船舶后移;艉缆是靠泊时,由船艉最后端向后出缆,向后带到码头上,一则将船艉部分靠紧码头,同时,防止船舶前移;艏倒缆是在船艏部甲板适当位置,靠泊时,由甲板出缆后,向船艉方向带到码头上,协助艉缆,防止船舶前移;艉倒缆是位于船艉部甲板适当位置,靠泊时,由甲板出缆后,向船艏方向带到码头上,协助艏缆防止船舶向后移动;艏横缆是位于艏缆与艏倒缆之间,与船体约垂直方向带到码头上,使船体靠紧码头;艉横缆是位于艉缆与艉倒缆之间,与船体约垂直方向带到码头上,使船体靠紧码头。
(3)人工系泊存在问题。随着国际贸易的发展,船舶的大型化成为一种趋势,船舶大型化不但对船舶设计和制造提出了更高的要求,也对码头船舶的系泊安全性提出了严峻的挑战。一方面,大型船舶在码头系泊时,使用了大量的系泊缆绳,在系泊过程中,会存在风、浪、流等作用的外载荷,人工作业因外载荷的不断变化在各缆绳的分配难以做到均衡,在这种受力不均匀的状态下,受力最大的缆绳容易崩断,继而其他的缆绳相继崩断,酿成严重的海损事故;另一方面,现代船舶特别是集装箱船靠离泊频繁,作业周期快,劳动强度大,作业人员时长处于疲劳状态,而且恶劣海况下,人工撇缆,带缆准确率底,延长了船舶靠港时间,增加了相应的费用,也直接影响船舶安全系泊安全作业。
3.机器换人“智慧系泊”模型的建立
(1)智慧港口信息化基础建设
港务集团虚拟园区网是通过先进的网络虚拟化技术,实现港务集团园区网端到端虚拟化,可以实现在一套高性能高可靠物理网络上得到N部分虚拟网络资源分配给不同的码头分公司使用,既能节省投资,又能简化管理。虚拟的网络资源能够灵活控制,相互间可实现安全隔离或可控互访,满足港口业务规划。港口码头室外无线网络是专业级的室外无线解决方案,具备IP66等级,能够稳定工作于-40~65℃环境,适用于港口室外复杂环境,为港口堆场、码头室外作业区手持终端、车载终端、RFID读写器、无线监控、无线语音等提供无线WIFI接入。[3]
(2)智慧系泊系统构建
驾控中心位置设置在船舶驾驶台,靠离港时以引航员、船长为中心,值班驾驶轮机员为协助,协同控制船舶智能系统、岸基服务设施,完成船舶操纵,无人机遥控自动携带缆绳、船舶机器人操作绞缆机、港口机器人拖带缆绳系缆桩、绞缆机自动预缆及脱扣系统等智慧工作过程。
机控中心位置设置在机舱集控室,以轮机长为中心,值班轮机员为协助,配合驾控中心,完成船舶机器人操作绞缆机、绞缆机自动预缆及脱扣系统作业前测试、过程监控及系统故障应急处理。
系统监控中心在港口码头管理中心、驾控中心、机控中心分别设置显示终端,实时传送船舶靠离港作业场景。
无人机遥控自动携带缆绳模块在驾控中心配置移动终端,根据引航员、船长的指令,无人机遥控操作由值班驾驶控制,无人机可使用四旋翼飞行器完成水平和垂直飞行,配备摄像头方便值班驾驶员操作,无人机下方安装缆绳携带装置方便将缆绳送至港口机器人。
船舶机器人操作绞缆机模块在驾控中心配置移动终端,根据引航员、船长的指令,大副操控设于船头机器人操作绞缆机,二副操控设于船尾机器人操作绞缆机,船舶机器人主要负责操作绞缆机完成启停、正反转等功能。
港口机器人拖带缆系缆桩模块在驾控中心配置移动终端,根据引航员、船长的指令,大副操控设于船头港口机器人拖带缆系缆桩,二副操控设于船尾港口机器人拖带缆系缆桩,港口机器人安装缆绳携带装置,与无人机配合接受缆绳,然后将缆绳系在系缆桩上。
结语
随着我国“一带一路”战略的实施,航运业必将迎来大力发展的绝佳机遇,港口需要停靠的船舶数量、种类必将大幅增加,这对船舶靠港系泊作业的高效性和安全性提出了新的挑战。随着物联网、云计算、大数据等技术的进一步成熟和应用,未来的港口将向是"智慧"的港口发展,其中“智慧系泊”必将是其中的重要环节。本创意通过虚拟化软件和机器人的有机结合,依托信息化技术,融合智能交通理念,构建高度信息化、高度自动化和高度集成化的“智慧系泊”系统,机器换人有效的解决了人工系泊效率较低,受环境影响大,安全性能不高的问题,为我国“智慧”港口建设提供了一块技术含量高、时效性强且易于实现的拼图。
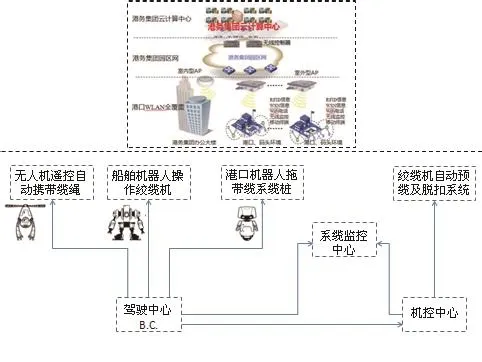
智慧系泊系统模块关联图
[1]智慧港口解决方案.工程中心.2015.4.
[2]张晓.未来港口财富论坛.2011.2.
[3]徐小凤.物联网在未来港口中的应用探析J.中国水运.2011.01.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
山东冶金(2022年2期)2022-08-08
水道港口(2022年1期)2022-05-18
航空学报(2021年9期)2021-10-20
船舶标准化工程师(2020年5期)2020-10-17
上海海事大学学报(2019年4期)2019-12-30
船海工程(2018年1期)2018-03-01
中国港湾建设(2017年11期)2017-12-19
船舶(2014年2期)2014-01-04
船海工程(2013年6期)2013-03-11