深海多功能浮标设计
2018-06-14 01:24,,,
船海工程 2018年3期
,,,
(中国船舶科学研究中心 深海载人装备国家重点实验室,江苏 无锡 214082)
目前“蛟龙号”“深海勇士”等深海载人平台主要依靠水面支持母船,实现深海高精度定位,以及与岸基之间的远距离通信。但随着深海载人平台续航能力的提升,对其自主能力提出了更高的要求,不再依赖水面母船的支持。因此,深海载人平台独自在深海长时间航行作业期间,如何获取高精度的位置信息和实现与外界信息的远距离交互,成为深海载人平台的迫切需求。
为此,国外相继发展了多种体制的多功能浮标技术和装备,基本途径是在水下释放搭载导航定位、通信、光电探测等多种传感器的浮体,上浮出水面快速执行任务后立即回收或抛弃。按照浮标是否可重复使用,可分为消耗型浮标和可回收型浮标;按浮标的连接方式,可分为有缆浮标和无缆浮标2种;按使用方式分主要有抛弃式浮标、拖曳式浮标和系留式浮标3种[1],见表1。
国外多功能浮标在设计时,为提高深海载人平台的隐蔽性,未采用声学定位的方式进行水下位置的精确校准,因此浮标虽能够实现自身高精度定位,但深海载人平台无法获得更为精确的水下位置。针对深海载人平台的迫切需求,提出一种深海多功能浮标的总体技术方案,以期实现深海载人平台水下绝对位置的精确校准,远距离的语音和数据通信。

表1 国外多功能浮标技术特点[2-4]
1 深海多功能浮标技术指标对比
1.1 多功能浮标主要技术指标要求
多功能浮标主要技术指标见表2。

表2 多功能浮标主要技术指标[5]
1.2 有缆浮标与无缆浮标方案对比
有缆浮标与无缆浮标区别主要在于:深海载人平台与多功能浮标之间的数据传输及供电。
有缆浮标优点是深海载人平台与多功能浮标之间数据传输可靠,深海载人平台能够为多功能浮标提供能源供给,能有效地减小多功能浮标的重量和体积。其缺点是在深海载人平台上需要增加收放多功能浮标的绞车和电缆等设备,并且,由于多功能浮标工作时,距离深海载人平台有数千米的距离,多功能浮标与深海载人平台之间的电缆可能会对深海载人平台的水下安全产生影响,同时浮标也可能无法正常工作。
因此,为保证深海载人平台水下航向作业的安全,以及减轻深海载人平台总体负担,初步考虑采用无缆浮标的方案。
2 多功能浮标总体技术方案
2.1 多功能浮标组成
多功能浮标主要由控制主机、卫星通信系统、卫星定位系统、声学应答器、能源供应系统、测量传感器、设备舱、安装固定装置等组成[6],见图1。
1)系统控制主机。系统控制主机用于深海载人平台遥控多功能浮标中各设备的启停,以降低多功能浮标各设备的功耗,控制主机平时处于休眠状态,通过用声学应答器对其唤醒开始工作。它通过声学应答器接收深海载人平台发送的遥控指令及发送相关信息到深海载人平台。
2)卫星通信定位设备及天线。卫星通信定位设备及天线用于深海载人平台水下作业时与支持母船或岸基之间的数据传输,以及接收全球定位数据以确定多功能浮标的绝对定位坐标。天线安装在多功能浮标上,工作时要求浮在水面以上;收发主机则安装在设备舱内,二者之间通过水密电缆相连实现微波通信。卫星通信系统的启停由控制主机控制。
3)声学应答器。声学应答器主要建立多功能浮标与深海载人平台之间的通信,同时确定多功能浮标相对于水下深海载人平台的相对位置。声学应答器包括控制主机和换能器两部分。
4)高性能锂电池。高性能锂电池主要为多功能浮标上的设备进行供电。蓄电池量应不小于60 Ah,因此选用软包装的24 V、20 Ah动力锂电池三组并联使用。
锂电池组统一或单独安装在设备舱内,锂电池组使用过程中的状态通过多功能浮标主机进行监控,并把相关数据发送到水下深海载人平台。
5)其他设备。其他设备为可选设备,主要包括物化传感器和CTD传感器。主要用于在多功能浮标的上浮过程中,对海洋物理化学参数进行剖面测量。
2.2 多功能浮标工作原理
按照对多功能浮标的功能需求,与多功能浮标相关的整个系统分为多功能浮标、深海载人平台和母船或岸基三部分,其工作原理如图2所示。多功能浮标与深海载人平台不通过电缆连接,二者之间主要使用水声信号进行数据通信,工作时多功能浮标由深海载人平台水下释放,多功能浮标被释放后依靠自身浮力浮到海面后开始建立通信链路,多功能浮标把所接收到的水声信号变成微波信号。通过通信卫星实现与母船或岸基之间的通信,还可以接收定位卫星信号以确定其在水面位置,然后深海载人平台通过水声定位或位置推算的方法在水下对其导航定位位置进行校准。多功能浮标工作完成后水面母船或深海载人平台通过作业潜器等方式回收。
3 浮标横摇性能分析
3.1 浮标在静水中的自由横摇
假设浮标在静水中自由横摇,忽略其阻尼力矩,只考虑惯性力矩和恢复力矩,则可计算浮标自由横摇的近似固有频率nφ
(1)
式中:D为浮标排水量;h为浮标初稳心高;Jφφ为浮标转动惯量;ΔJφφ为浮标附加转动惯量。
由式(1)可得浮标自由横摇的近似固有周期Tφ为
(2)
由式(2)可见,浮标作小角度横摇时,其横摇固有周期同横摇角的大小及持续时间无关,仅仅取决于浮标的排水量,初稳心高及转动惯量。
实践表明转动惯量对横摇固有周期不很敏感,因此通常采用杜埃尔公式[7-9]进行估算。
(3)
式中:g为重力加速度;B为浮标直径;zg为浮标重心距基线的高度。当h>0.15 m时,依据式(2)、式(3)可得
(4)
当h<0.05 m时,
(5)
式中:φmax为最大横摇角;r为横稳心半径。
当0.05≤h≤0.15 m时,可取式(4)、式(5)两式计算结果的平均值。
3.2 浮标在规则波中的横摇运动
浮标在波浪上的横摇运动,归结为分析计算浮标在波浪上横摇运动的受力,并建立和求解的横摇运动方程。
浮标横摇主扰动力矩的计算,可根据傅汝德关于船在正横波中的横摇经典理论[9-11],假定:
1)作用于浮标上的规则波是稳定的平面进行波。
2)浮标的存在不影响波浪质点运动。
3)浮标处在正横波上,其直径、吃水与波长比较是很小的。
4)不考虑阻尼及附加质量影响。
如图3所示,假设浮标在正横波中的一个瞬时状态,它倾斜一个角度φ,水的作用力矩为
(6)
式中:α为波面角;h为初稳心高。
假设附加质量和阻尼力矩很小,可以忽略[12],且在小角度横摇时,
(7)
式中:Jθθ为浮标本身转动惯量;Dhφ为浮标横倾角φ引起的恢复力矩;Dhα为波浪主扰动力矩。
整理(7)可得
(8)
式中:Tφ为浮标横摇的近似固有周期;Tα为波浪周期。
当自由阻尼横摇振幅衰减为0时,浮标最大横摇角为
(10)
式中:H为波高;L为波长。
3.3 多功能浮标横摇仿真验证
浮标在波浪中的横摇性能与浮标横摇的固有周期和波浪周期有关。
由式(4)可知,浮标横摇的固有周期与浮标直径B、浮标重心距基线的高度zg以及浮标初稳性高h有关。浮标在设计时,可减小浮标直径,降低浮标重心位置。
浮标重心为
(11)
将表3中浮标设备的重量及尺寸代入式(11)中,可得浮标重心距基线的高度zg约为0.21 m。
多功能浮标需要在5级海况正常工作,为保证其定位和通信质量,要求其横摇角不大于10°。
经查阅海上标准可知,5级海况平均波高H
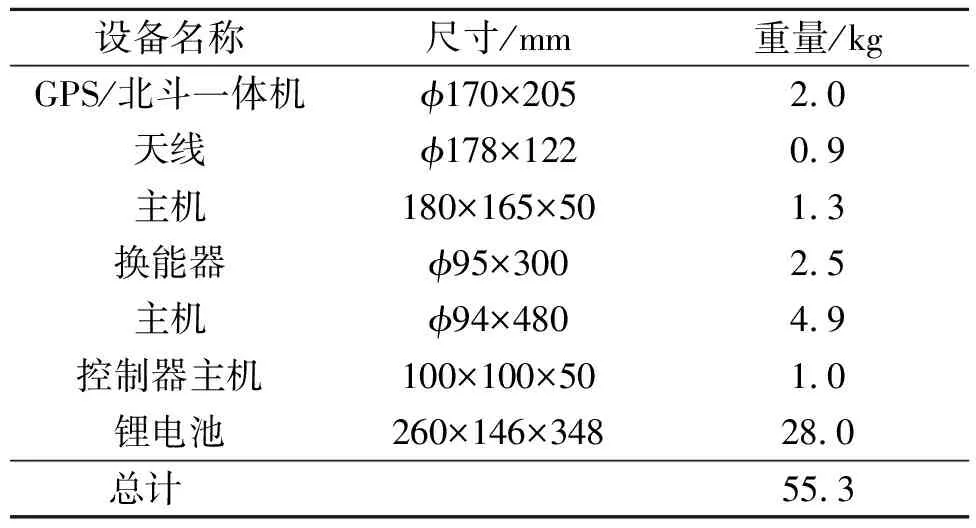
表3 多功能浮标主要设备参数统计表
为1.311 m,平均波长L为30.18 m,波浪周期Tα为5.4 s,则多功能浮标横摇角度随其固有周期的变化规律如图4。
由图4可见,为保证多功能浮标具有较小的横摇角度,则其固有周期应尽量避开波浪周期。
多功能浮标的总重量约为55.3 kg,则浮标的排水体积D为0.054 m3,浮标稳心距基线的高度为zB,则横稳心半径为
(12)
(13)
由式(4)、式(5)可绘制出多功能浮标固有周期随浮标直径的变化值,见图5。
由图5可见,多功能浮标直径选择时,应避开共振区,即B应尽量远离0.5~0.6 m。
综合考虑多功能浮标直径为0.3 m,浮标稳心距基线的高度zB为0.38 m,初稳心高h为0.16 m,在5级海况的最大横摇角φmax为8.29°,浮标横摇角符合设计要求。
4 结论
深海多功能浮标具有体积小、重量轻、易搭载等特点,适合大部分深海载人平台,有利于提高其水下高精度定位、远距离通信以及遇险救生通信的能力,为深海载人平台水下导航和通信提供了新的手段。
后续将对圆柱形深海多功能浮标在不规则波中的横摇性能进行分析和仿真,进一步优化深海多功能浮标的直径,并在水池中对设计结果进行验证,以使其在5级海况下具备最优的横摇性能。
[1] 梁璐,马文骄,茆琳.国外潜艇通信浮标类型及技术分析[J].现代工业经济和信息化,2015(20):73-75.
[2] 严巍.两种新型潜艇通信浮标研究概况[J].舰船电子工程,2006,26(4):31-34.
[3] 孙东平,荣海洋,张靖康.卫星浮标天线技术及其在潜艇通信中的应用[J].装备环境工程,2009,10(6):54-56.
[4] 刘瑞海,徐文涛,张良.潜用抛弃式有线浮标及其关键技术[J].舰船科学技术,2017,39(2):137-140.
[5] 杨会金,王嘉鑫,姚武军.基于声学和无线电通讯的海洋中继浮标技术[J].舰船科学技术,2011,33(5):137-140.
[6] 王浩.深海浮标的总体设计与计算分析[D].哈尔滨:哈尔滨工程大学,2012.
[7] 曲少春,郑琨,王英民.圆柱形浮标运动分析与仿真[J].计算机仿真,2010,27(6):363-366.
[8] 唐超,卢树军,朱江.海浪摇摆下的浮标卫星通信系统性能分析半[J].通信技术,2016,49(6):729-734.
[9] 李积德.船舶耐波性[Ml.哈尔滨:哈尔滨工程大学出版社,2007.
[10] 鄢文军,刘卫斌,刘云辉,等.一种浮标自由上浮模型试验换算方法[J].船海工程,2011,10(5):172-179.
[11] 李玉成,王凤龙,康海贵.作用于小尺度圆柱上的波浪、水流力[J].海洋工程,1993(3):46-59.
[12] 杨瑞,刘寅东,顾群,等.海上溢油跟踪定位浮标参数分析及技术优化研究[J].船海工程,2014,8(4):101-106.
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
舰船电子工程(2021年5期)2021-06-04
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
垂钓(2019年2期)2019-09-10
学苑创造·A版(2017年4期)2017-05-13
学苑创造·A版(2017年5期)2017-05-09