基于标校望远镜的装备标校系统的设计与实现
2018-06-14 05:47周俞
数字技术与应用 2018年3期
周俞
(中国人民解放军91245部队,辽宁葫芦岛 125001)
1 引言
导弹、飞机等空中目标的轨迹数据主要由测量控制站的测角、测距、测速等数据推导而成[1-3]。其中测角的数据精度主要由天线的技战术性能决定,天线的技战术性能在研究成型后就已经固定不变,但在环境、温度等因素长期改变下,角度零值和光电差等会有变化,直接影响测角数据的精度[4-5]。因此,在实际应用前,应对天伺馈系统进行光电标校。
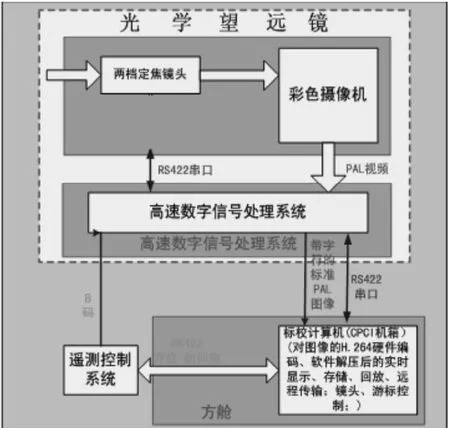
图1 标校电视系统结构方框图
2 系统组成
标校电视系统的主要功能是完成测控系统中的远近场标校、目标监视、时钟显示和实时图像摄录等。系统标校主要是天线的光、电、机械轴标校和跟踪天线的角度、距离零值标校。
标校设备主要由标校电视、s波段信标机、校零转发器、专用标校板、工装设备等组成。标校电视系统由光学望远镜(包括两档定焦望远镜、彩色摄像机)和标校计算机(CPCI工控机)两部分组成,结构方框图如图1所示。
3 工作原理
光学望远镜由光学系统(两档定焦望远镜)、头部控制小系统、彩色摄像机、高速数字信号处理系统四个模块组成。
3.1 摄像机选型
型号:1/2英寸,BOSCH LTC0610/11C,低照度彩色摄像机;帧频;25C/s;制式:PAL制式;视频输出:模拟输出,1VP-P,75Ω;分辨力:540 TV Lines;灵敏度:0.23Lx。
标校电视的光学系统结构如图2。透射式分档变倍光学系统,光学系统设计口径D≥80mm,焦距为100mm/500mm连续变焦。该结构利用负透镜(调焦镜组3)来有效地缩短筒长。系统中采用了自动光圈2和相机的电子快门实现自动调光方式,保证系统的成像质量;采用手控电动的方式,通过前后移动调焦镜组3并从图像显示器上可直接观察结果,满足距离调焦和温度调焦的要求;通过电动控制小倍率镜组5的移出和移入,分别满足系统的长焦距和短焦距要求。

图2 光学系统设计结构图

图3 机械设计结构图
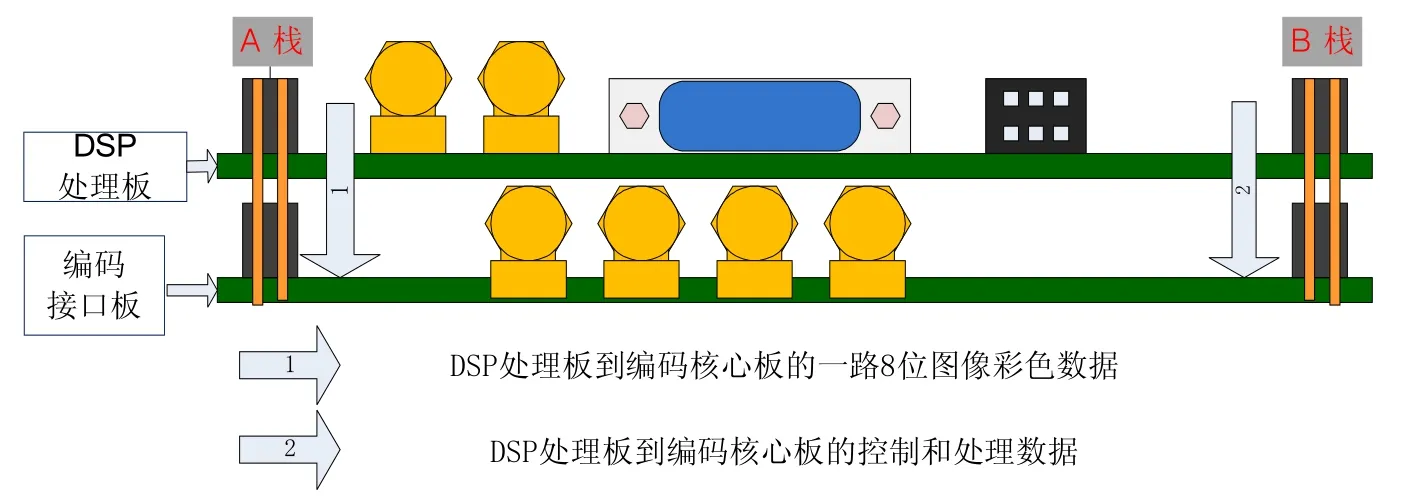
图4 信号处理系统结构图
3.2 机械系统设计
机械设计的设计思想主要在整机的耐环境设计中具体描述。以下是机械设计的结构如图3。
高速数字信号处理系统结构示意图如图4所示。
高速数字信息处理系统由DSP处理板、编码接口板两块电路板组合实现,该系统放置在光学望远镜的箱体内,通过RS422与标校计算机进行通讯。DSP处理板完成标校电视系统的信号处理功能,编码接口板承担DSP处理板对外的数据传输以及提供电源的二次稳压给DSP处理板。该视频编码板放置在标校计算机内,采用CPCI的系统结构。
4 系统软件设计
标校电视操控管理系统的操控界面如图5所示。点击连接显示后该按键显示为连接中,左下方为视频显示区,显示网络视频流或本地保存的视频文件。右下方的状态显示区显示电路板的工作情况。四个指示灯分别对应为头部控制,图像处理,天控器和编码器。绿色表示正常,红灯表示工作不正常,需要维修。右方的控制区分为三部分,从上至下分别为图像记录检索回放区,镜头游标控制区系统控制区与状态显示区。图像记录检索回放区各按钮对应功能如下:“连接显示”:点击后按钮显示为“连接中”,同时在图像区显示视频图像,此时可以在图像区鼠标左键选择游标位置。“记录”:点击后开始存储视频,按钮显示“停止记录”,视频存放位置在“路径设置”中选择的文件夹下。点击“停止记录”,结束存储视频。“播放视频”:点击后结束网络连接显示(如果运行),选择播放本地保存的视频文件。播放按键可以按照1倍速、2倍速、4倍速、8倍速对记录下的图像进行播放。“路径设置”:选择网络视频的保存位置。镜头游标控制区包括“变倍”、“调焦”、“调焦”、“调光”、“调光”,游标上、下、左、右移动四种游标控制键。状态显示区包括“头部控制”、“图像处理”、“天控器”、“编码器”四个主要部分工作状态的显示。
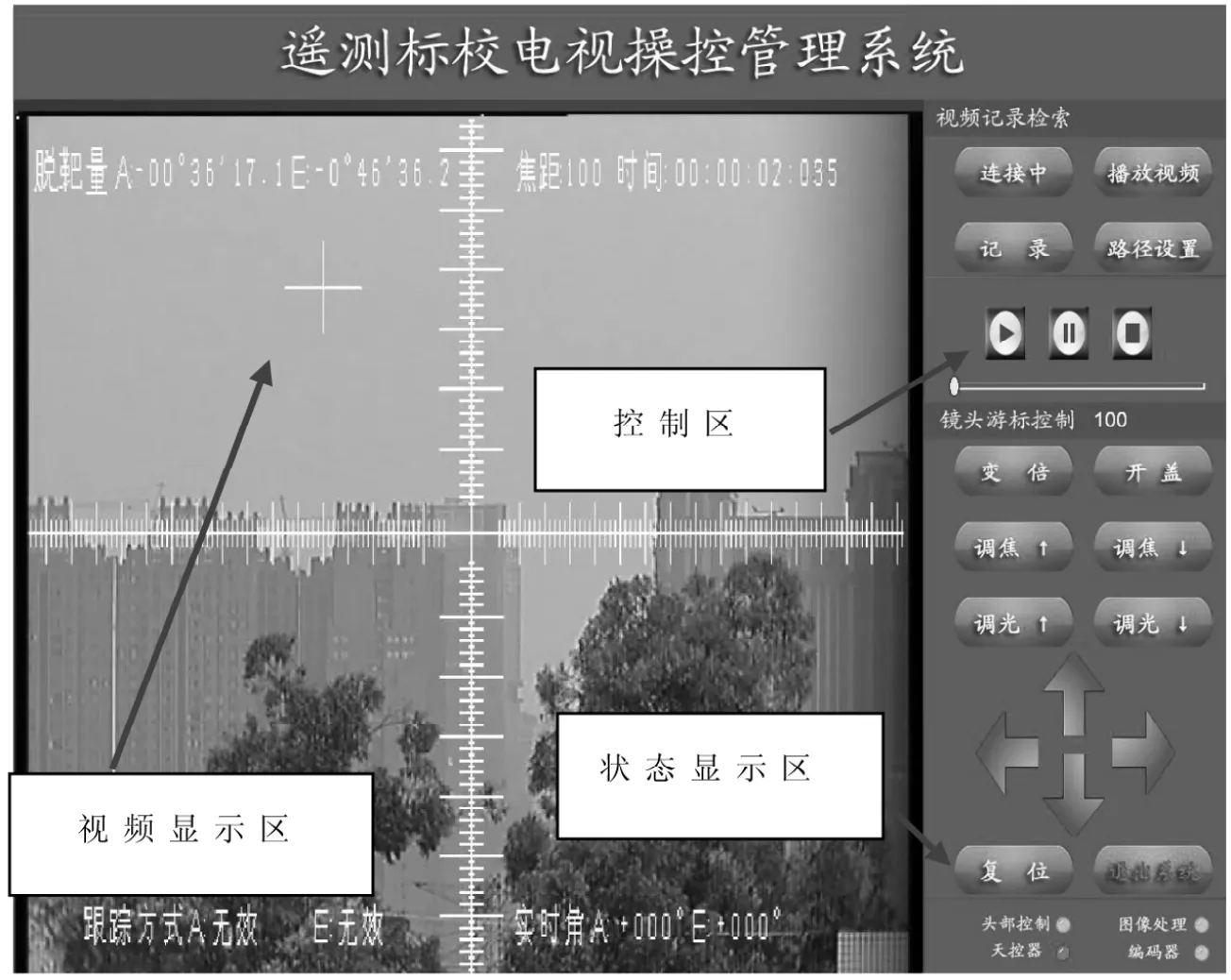
图5 软件运行界面
5 结语
该标校系统已成功应用在《某型机动式统一测控系统研制》及《某型遥测设备适应性改造》项目中,在某型遥测设备中进行系统标校工作。系统在标校望远镜等硬件基础上,基于VC++开发了标校电视操控管理系统软件。实现了测控系统中的远近场标校、目标监视、时钟显示和实时图像摄录等功能。实践表明, 系统设计合理,工作可靠,自动化程度高,具有较强的实用性,满足了自动化、通用化、模块化的设计要求,本系统的研制取得了成功。
[1]谢瑞宏.机载光电平台伺服系统稳定与跟踪控制技术的研究[D].中国科学院长春光学精密机械与物理研究所,2017.
[2]沈炅.考虑约束的电液伺服系统非线性鲁棒控制策略研究[D].南京理工大学,2017.
[3]梁勇飞.基于自构建神经网络高精度交流位置伺服系统研究[D].南京理工大学,2017.
[4]孙嘉峰.基于海基平台的伺服系统高精度跟踪控制算法研究[D].南京理工大学,2017.
[5]时军.高速直线伺服系统的学习前馈控制算法及谐振抑制研究[D].浙江理工大学,2017.
猜你喜欢
大电机技术(2022年3期)2022-08-06
黑龙江科学(2021年20期)2021-10-30
科学技术创新(2021年11期)2021-05-25
减速顶与调速技术(2020年4期)2020-11-22
电子制作(2019年7期)2019-04-25
宇航计测技术(2018年3期)2018-09-08
光学精密工程(2016年4期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
空间控制技术与应用(2015年1期)2015-06-05
电脑与电信(2015年9期)2015-04-16