多层穿梭机器人系统的研究与设计
2018-06-21 03:12傅友宾薛成超李翔宇
成组技术与生产现代化 2018年1期
傅友宾,薛成超,李翔宇
(新松机器人自动化股份有限公司 智能物流GB,辽宁 沈阳 110168)
以多层穿梭机器人系统为基础的“货到人”配送系统,具有显著提升效益和节省时间的特点,在欧美市场已经深入人心,很多企业已经将其作为优化物流布局、高效履行订单的技术首选.相比传统立体库上用的堆垛机,多层穿梭机器人在前期安装、使用和后期维护等方面灵活性更高.当用户的仓库或产线发生变化时,多层穿梭机器人能够便捷地拆装移动,增减产品数量,以便适应用户新的生产和仓储配送需求.
虽然多层穿梭机器人在欧美已经成为无处不在的常规产品,但是在中国还是厂商近两年向市场推广的新技术.与欧美等国家相比,中国对智能物流产品的需求仍处于起步阶段,多层穿梭机器人的应用尚未普及.随着该技术的日益成熟,国内大型企业逐步认识到了自动化物流产业的优势,已经开始引入多层穿梭机器人系统.该系统具有易于拆装,灵活性强、工作效率高等特点[1].
1 机器人系统的总体结构设计
多层穿梭机器人系统改变了传统自动化立体仓储的规划和格局.机器人在巷道内穿梭,实现货物的存取.巷道的一端是穿梭机器人提升机,实现穿梭机器人在巷道中不同层之间的转换;巷道另一端是双工位货物提升机,实现货物在货架与输送机之间的输送.多层穿梭机器人集成先进的工业设计,以超级电容为供电模块,并对供电系统进行能量反馈设计,可在工作中完成设备充电,真正实现24 h无间断作业.多层穿梭机器人系统总体布局如图1所示.
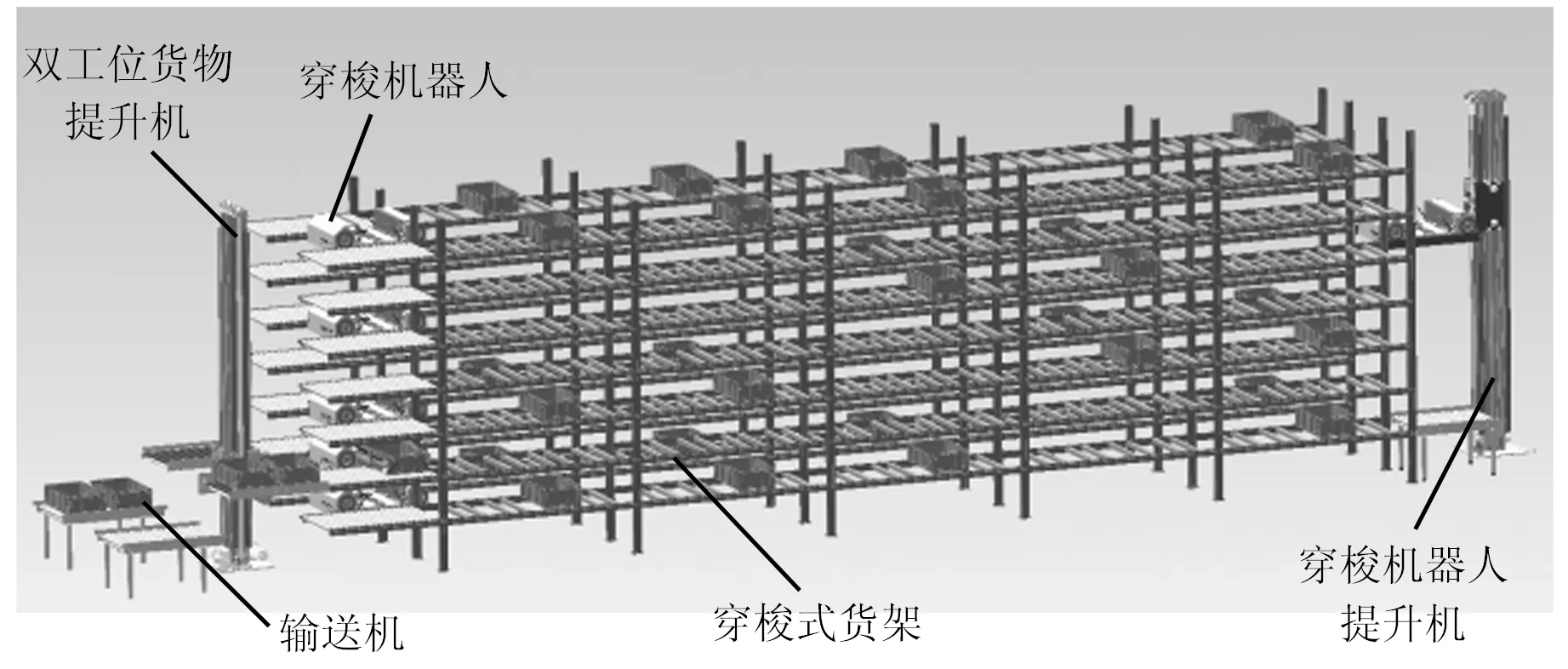
图1 多层穿梭机器人系统总体布局
2 电气控制系统设计
电气控制系统包括设备控制层和监控层两部分,它是多层穿梭机器人系统中执行机构的控制核心[2].其上位机采用多层穿梭机器人系统的调度计算机,通过接收、发送指令完成货物的运送;下位机是多层穿梭机器人的驱动设备,完成货物的检测与识别,同时对控制信息进行传递[3-6].
2.1 控制系统的功能
通过软件界面可实现控制方式的切换,包括手动方式、联机方式、紧急停止及故障报警等.
(1)手动控制方式:电气控制系统在该控制方式下,由人工对各多层穿梭机器人正反向行走、货叉左右伸叉、勾叉升降进行控制操作.
(2)联机控制方式:电气控制系统在联机控制方式下接收上位计算机的指令,实现对多层穿梭机器人的自动控制,通过物流和数据的自动传输,满足物流工艺的要求.
(3)紧急停止及故障报警:地面控制系统及调度界面具有紧急停止操作功能.当按下急停按钮后,多层穿梭机器人停止运行.多层穿梭机器人系统出现故障时可自动诊断,将诊断信息传送给地面控制系统并发出声光报警.当遇故障而突然停电时,控制程序可以保持当前的状态,在重新上电后根据需要继续正常运行.
2.2 系统的控制界面
PLC编程和调试软件使用L-force PLC Designer 3.10及以上版本,以符合IEC 1131-3国际标准的PLC编程语言进行程序编写.标准化编程方式使程序易于扩展和维护,模块化编程方式使程序结构清晰明了.采用易于理解的符号表代替内存地址,以便查找与理解.详细的中文注释更便于理解程序功能.
另外,良好的人机交互界面可以为工作人员有较高工作效率提供保障,多样化的操作模式使控制系统能够实现更复杂的控制条件.系统的操作界面具有对穿梭机器人执行急停、解抱闸、故障复位、回原点等基本操作的功能,并可同时对多层穿梭机器人系统的其他输送设备进行维护操作.系统的人机控制界面如图2所示.
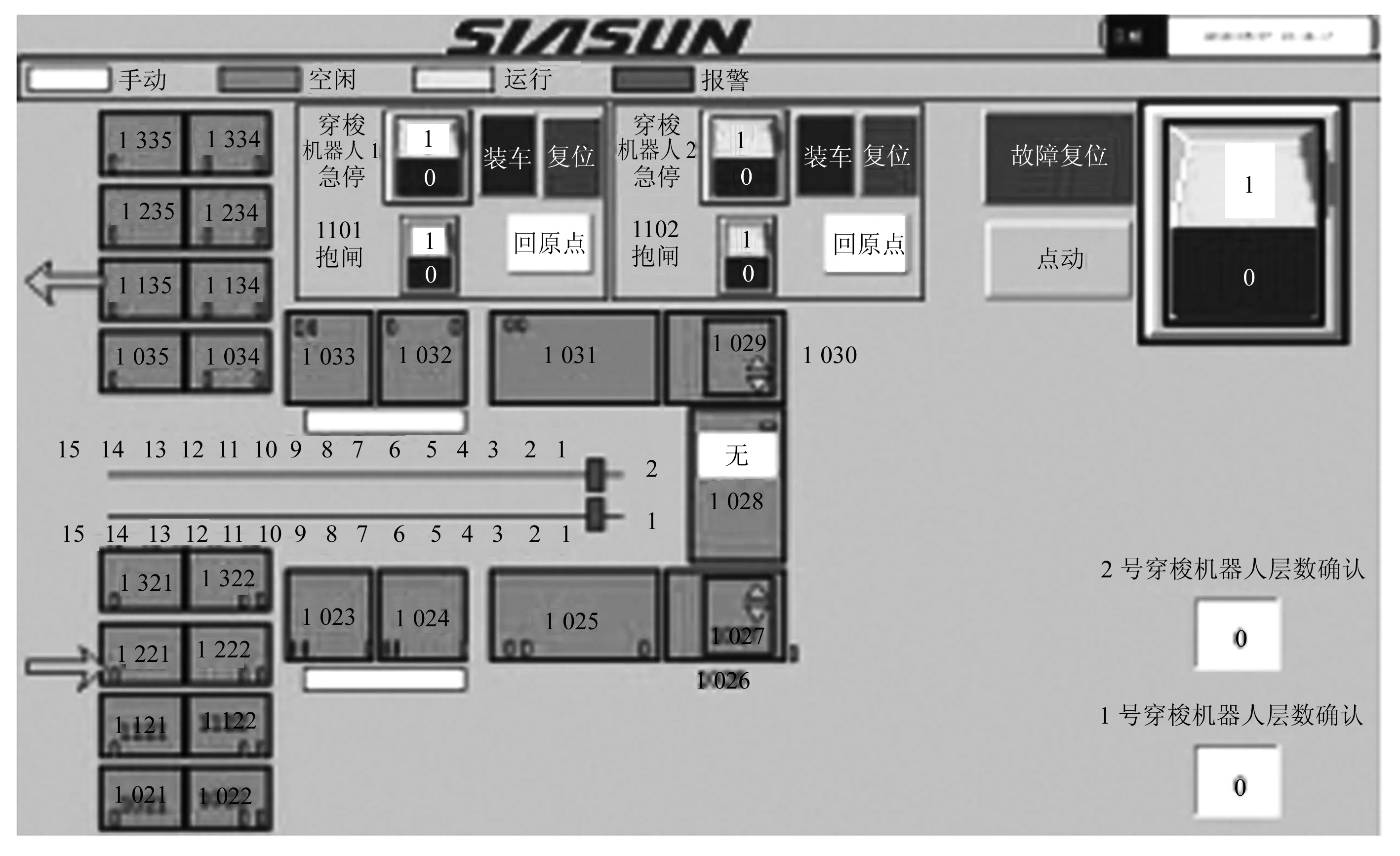
图2 系统的人机控制界面
2.3 供电装置
随着现代工业的迅速发展,超级电容器的用量越来越大.利用超级电容器的优越性能和特点,可有效满足多层穿梭机器人系统的供电需求.
超级电容器作为储能设备,在工作过程中会消耗电量.为保证多层穿梭机器人系统各部分稳定工作,超级电容器端电压需保持在165 V以上,以保证开关电源及变频器的正常使用.在程序控制方面,需实时监控直流母线电压(即超级电容器端电压).多层穿梭机器人在运动过程中回到充电位置时,若电压低于220 V就立即充电,此时伸叉动作正常执行;执行行走动作时将断开充电接触器.多层穿梭机器人待机过程中处于巷道内部时,若电压低于190 V则自动回到充电位置充电,直到满电250 V时断开充电接触器,并执行新的任务.
3 软件及通讯系统设计
通过需求分析,对多层穿梭机器人和传统堆垛机建立数学模型,用编程语言实现具体逻辑,使多层穿梭机器人拥有更高的效率,并且确定其应用场景.多层穿梭机器人的软件控制系统总体架构如图3所示.
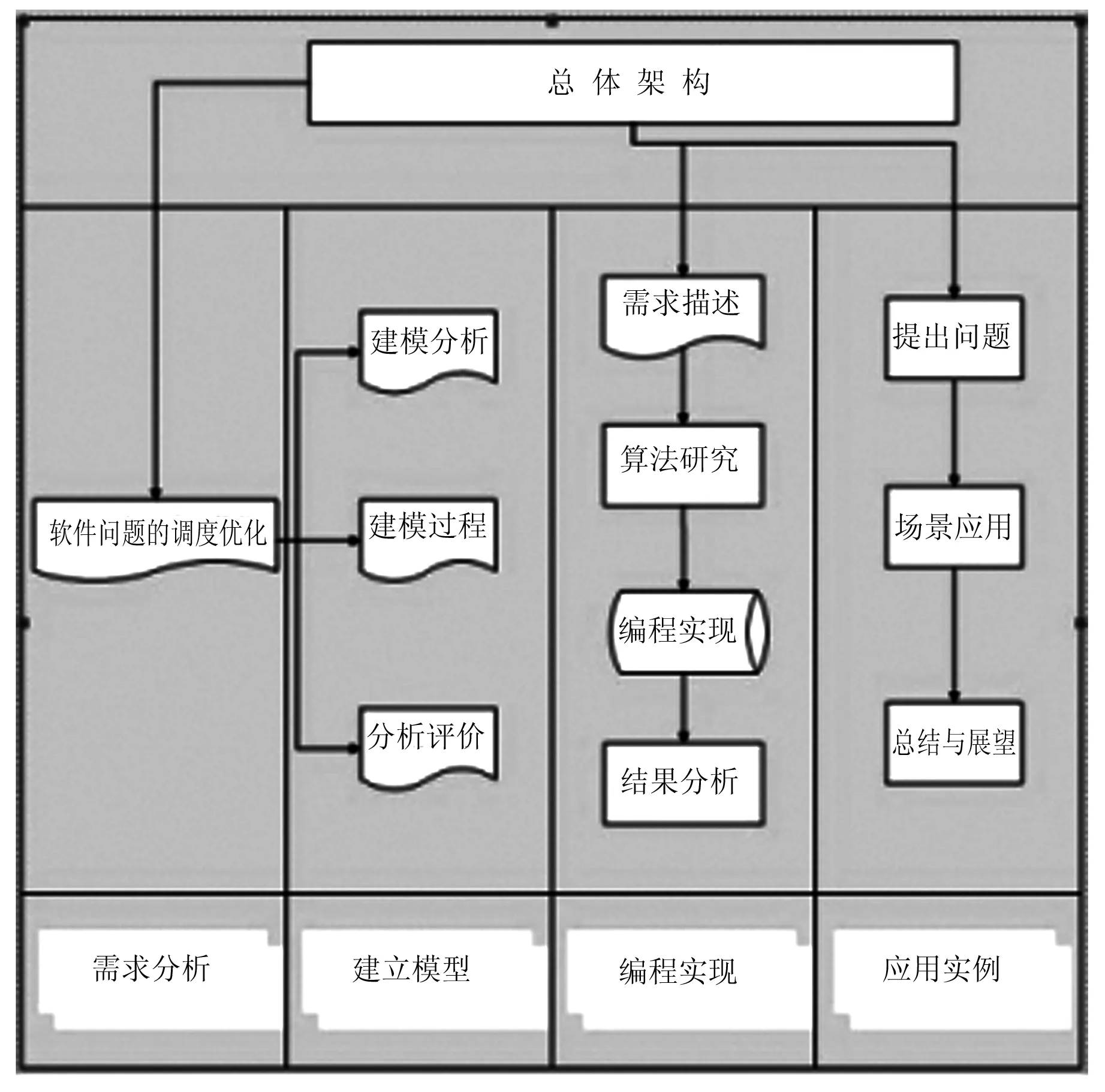
图3 软件控制系统总体架构
多层穿梭机器人系统的数据存储中心与应用中心是服务器.它能够对数据信息进行存储,同时运行应用服务程序,多层穿梭机器人的每个工作环节都有实时记录,当出现网络故障等问题时,系统可自行恢复连接,且各设备无需初始化.
通讯系统采用TCP/IP(Transmission Control Protocol/Internet Protocol)网络协议,与上位机的调度计算机进行通讯,通过数据库完成信息的传递[7].该系统具有作业管理、库存管理、统计查询、优化调度、设备监控等功能.
(1)作业管理:对出入库任务的执行信息进行管理,实时更新任务状态,查看任务执行状态,并进行手工删除、手工报告完成等操作.通过任务状态的跟踪完成对库存信息的更新[8-10].
(2)库存管理:对库中物资的库存及相关信息进行管理,通过仓库例行盘点,记录盘点的数量,进行盘赢、盘亏处理,根据库存盘点结果对库存数量与系统记录数量的差异进行调整,并打印出库存盘点报告[11-12].
(3)统计查询:按用户要求执行各种组合条件的查询并统计仓库日常运行数据,包括货架、库位、作业任务等.通过信息综合查询与统计分析,分类生成各种统计数据,实现信息查询和信息统计.所有信息均可转存为Excel表格或用Word文档保存.
(4)优化调度:可提供批次处理下任务(指令)的缓存和管理,包括任务优先级的管理、指令的增加/修改/删除等操作.该模块能根据设备的一些属性详细规划设备组合运行的最优路径,大大提高设备的有效利用率.
(5)设备监控:通过物流在线仿真界面,所有物流控制系统和物流设备信息均可实时更新,动态显示物流的运行状态、设备状态、位置及完成情况、故障提示和报警信息等.
系统的调度监视界面如图4所示.

图4 调度监视界面
4 结 论
多层穿梭机器人系统提高了出入库的吞吐量,使整个出入库的效率大大提高.与传统的自动化立体仓库相比,多层穿梭机器人系统具有突出的优点.
(1)更高的存储密度.支持货物的双伸或者多伸存储和处理,不同大小的货物经过包装可存放在非固定货位,提升机能够连接上下工位并且实现多工位处理,确保存储密度和空间利用率的最大化.
(2)任务排序更优化.针对上层管理任务,通过算法优化,最后的排序方式可呈现给用户,配合多层穿梭机器人可大大提高作业的吞吐率.
(3)多样化的货物类型.多层穿梭机器人比较灵活,整个系统能够适应所有尺寸的货物类型.
(4)可拓展性强.任何层级都可随时加入多层穿梭机器人,不需要过多调试,系统就能顺利运行.
参考文献:
[1] 史科科,韩天文. 一种新型交叉带分拣机的研究与分析[J].机械工程师,2017(5):88-90.
[2] 杨 芳,曲立彦,杨建平. 全面集成物流管理系统软硬件系统结构设计[J].软件,2012,33(2):24-26.
[3] 顾 红.卷烟企业物流系统柔性调度管理研究[D].昆明:昆明理工大学,2012.
[4] Geyik F,Cedimoglu I H.The strategies and parameters of tabu search for job-shop scheduling[J].Journal of Intelligent Manufacturing,2004,15(4):439-448.
[5] 齐昌盛.自动小车存取系统效率优化设计与仿真[D].厦门:厦门大学,2011.
[6] Yuan X H,Zhou S S.The research of syntax tree of the compiler based on programmable logic controller ladder diagram[C]//International Conference on Business Management and Electronic Information.New York,USA:IEEE,2011:100-102.
[7] 徐 涛,刘志铁,李 淞,等.延吉卷烟厂自动化物流信息管理系统设计[J].物流技术与应用,2011,16(5):82-83.
[8] 宋 旻.石油行业计量器具智能化仓储系统的设计与运作管理[J]. 物流技术(装备版),2013(4):94-96.
[9] 曾 勇,董丽华,马建峰.排队现象的建模解析与模拟[M].西安:西安电子科技大学出版社,2011.
[10] 马小姝,李宇龙,严 浪.传统多目标优化方法和多目标遗传算法的比较综述[J].电气传动自动化,2010,32(3): 48-50.
[11] 卓 雷.电能计量中心智能仓储管理及物流系统设计与应用[D].北京:华北电力大学,2016.
[12] 肖际伟.配送中心拣货系统优化[D].济南:山东大学,2010.
猜你喜欢
当代陕西(2020年13期)2020-08-24
铁道通信信号(2020年10期)2020-02-07
小猕猴学习画刊(2019年9期)2019-11-08
北京航空航天大学学报(2019年9期)2019-10-26
成都信息工程大学学报(2019年3期)2019-09-25
三门峡职业技术学院学报(2019年1期)2019-06-27
制造技术与机床(2017年5期)2018-01-19
小天使·三年级语数英综合(2017年6期)2017-06-07
潍坊学院学报(2016年2期)2016-12-01
新闻传播(2015年11期)2015-07-18