基于加权信度熵的传感器数据冲突度量与融合
2018-06-21 00:57唐永川赵晓哲
电光与控制 2018年6期
周 颖,唐永川,赵晓哲
(西北工业大学电子信息学院,西安 710072)
0 引言
多传感器数据融合与智能决策作为一类共性问题是当前研究的热点之一[1-2]。在目标识别中,如何对带有冲突的多传感器数据实现不确定信息度量,进而实现冲突数据融合与智能决策,仍然是一个难题[3-4]。不确定信息处理是当前数据融合领域的研究热点,引起了相关学者的广泛关注。D-S证据理论[5-6]在不确定信息处理中应用广泛,但是如何在D-S证据理论框架下度量信息的不确定性程度仍然是一个值得深入研究的问题[7-8]。
香农熵是概率框架下不确定度测量的典型方法,在信息量度量中被广泛采用,但香农熵并不能直接应用于D-S证据理论框架下的mass函数中。因此,文献[9]提出了一种名为Deng熵的不确定性度量方法,在一些情况下,Deng熵的不确定性度量效果要优于文献[9]中提及的其他度量方法。但是,类似其他信度熵,Deng熵并没有考虑到辨识框架(FOD)这种不确定信息源的因素,这就意味着在信息处理过程中损失了一部分可用且有价值的信息。考虑到Deng熵的不足,本文提出了加权信度熵,新的度量方法采用了关于FOD的命题相对标度,即命题元素的势和FOD中的元素个数都成为构建加权信度熵的权重因子。
随后,基于新的信度熵度量方法,为了融合多传感器冲突数据,本文提出了一种多传感器冲突数据融合方法,并以目标识别与智能决策为应用对象。新方法采用加权信度熵建模了多传感器数据不确定性后,采用具有诸多优势的经典Dempster组合规则进行数据融合,最后,基于数据融合结果进行目标识别决策。新方法能有效克服依赖单个传感器决策的风险。算例实验和对比分析验证了本文方法的有效性和比较优势。
1 基础理论
1.1 D-S证据理论
D-S证据理论假定了一组固定且完备的互斥事件集Θ={θ1,θ2,…,θn},命题与集合Θ的所有子集相关,2|Θ|称为FOD,表示为
Ω={∅,{θ1},{θ2},…,{θn},{θ1,θ2},…,{θ1,θ2,…,θn}}。
(1)
数学意义上,基本概率指派(BPA)或mass函数是从Θ幂集(所有子集的集合)到[0,1]的函数,并满足文献[1-2]中的约束,即
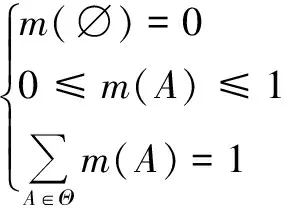
(2)
非零mass值对应m(A)函数中元素A,称作焦元,焦元与相应的mass值构成证据体(BOE)。
对于两组BPA,m1和m2,Dempster组合规则定义为
(3)
式中,A≠∅。若A=∅,则m(A)=0,即空集与空集的Dempster组合规则结果为0。
1.2 D-S证据理论框架下不确定性度量
香农熵表明每条信息的信息量与其不确定度直接相关,香农熵不能被直接应用于D-S证据理论框架,因此,近似香农熵,文献[9]总结了几种D-S证据理论框架下典型的不确定性度量方法后,提出了Deng熵,为
(4)
式中:X即为式(1)中定义的FOD;A是mass函数的焦元,|A|表示命题A的基数。
2 加权信度熵
文献[9]中新近提出的Deng熵,具有其他信度熵所不具备的一些优点。如兼容香农熵,能在其他不确定性度量失效的情况下有效度量不确定性变化程度。在D-S证据理论中,不确定信息不仅由mass函数表示,FOD也是不确定性的来源,例如,即使每个命题的mass值保持不变,FOD中的元素数量也会发生改变。然而,Deng熵与文献[9]中提及的典型信度熵一样,只考虑了mass函数,忽略了命题的基数和FOD的标度,这将导致信息处理过程中信息丢失。因此,选用Deng熵进行改进。
通过处理证据中更多可用的信息,包括FOD的标度|X|以及焦元相对于FOD的相对标度|A|/|X|,新的信度熵命名为加权Deng熵,定义为
(5)
式中,X是FOD,|X|是FOD中元素的数量。
为了检验改进信度熵的效果和优越性,采用文献[9]中的算例验证新的加权信度熵的合理性和有效性。取mass函数:m({6})=0.05,m({3,4,5})=0.05,m(T)=0.8,m(X)=0.1,在FODX={1,2,…,14,15}中有15个元素,分别表示元素1,元素2,…,元素15,T表示元素变化数量从1到14的变量子集。
通过不同的命题计算Deng熵Ed[9]和式(5)中定义的加权Deng熵EWd,结果如表1所示。表1还给出了文献[9]中提及的加权Hartley熵、Hohle混沌度等方法的度量结果。

表1 加权信度熵与多种不确定性度量方法计算结果比较Table 1 Calculation results of the weighted belief entropy and other uncertainty measurement methods
从表1可以看出,加权Deng熵的值小于Deng熵值。这是因为在加权信度熵中考虑了证据体(BOE)的更多信息,这意味着加权Deng熵比Deng熵损失的信息更少,因此不确定信息的不确定程度降低。Hohle混沌度所量化的不确定度不会随着命题T中元素数的变化而变化,因此,在这种情况下不能度量不确定度的方差。利用加权Hartley熵、Deng熵和加权Deng熵,不确定度会随着命题T元素数的增加而显著增加,但加权Hartley熵和Deng熵因未考虑FOD信息,与加权Deng熵相比信息损失更大。
在完全利率市场化之后,相对于银行存款的优势会更小。在目前的利率管制制度下,资金的实际使用成本远高于银行存款利率,货币基金完全投资于协议存款就有很高的收益率,而不用像美国货币基金去承受债券市场的风险,因此货币基金的收益率会随着银行间的同业市场利率波动而波动。未来"宝宝类"产品收益可能还会下降,货币基金规模增长的速度可能放缓,有望更健康平稳发展。
3 基于加权信度熵的数据融合与目标识别方法
基于加权Deng熵的不确定信息度量能力,提出了一种传感器冲突数据融合方法。在这种方法中,证据的不确定程度由所提出的加权信度熵度量,新方法流程如图1所示。
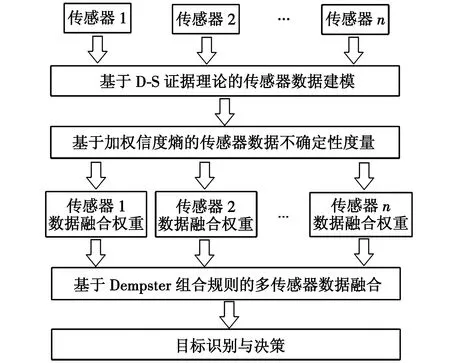
图1 基于加权Deng熵的传感器数据融合流程图Fig.1 The flow chart of the weighted Deng entropy-based sensor data fusion approach
图1所设计的基于加权Deng熵的传感器冲突数据融合与目标识别方法主要包括如下5个步骤。
1) 基于D-S证据理论中BPA函数,将来自不同传感器的数据进行建模。
2) 基于加权信度熵,即式(5)所述加权Deng熵,对各组BPA开展不确定性度量。
3) 基于步骤2)的不确定性度量结果,计算每个传感器数据源的权重。一般而言,每组传感器数据的权重与每个BPA的不确定性测量值呈正相关。对于n个传感器数据源,第i个传感器数据权重为
(6)
4) 使用Dempster证据组合规则进行数据融合。
5) 基于传感器数据融合结果进行目标识别与决策。
4 算例示例与分析
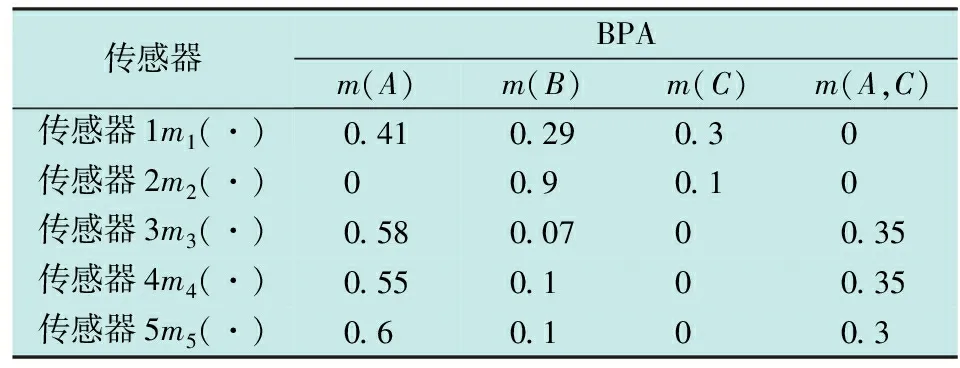
表2 来自传感器报告的数据所建模生成的BPATable 2 BPAs obtained by modeling the data from sensor reports
对于步骤3),基于式(6),则每个传感器相对权重的算式为
(7)

针对步骤4),利用Dempster证据组合规则,每个新的加权mass函数都融合了4次。融合结果为m(A)=((((mw⊕mw)⊕mw)⊕mw)⊕mw)(A)=0.989 5。同理可得,m(B)=0.000 3,m(C)=0.005 7,m(A,C)=0.004 5。
表3列出了本文方法和基于经典Dempster组合规则以及文献[11]中Murphy组合规则等不同方法的数据融合结果。如果仅采用Dempster组合规则,则不能成功识别出目标,甚至得到错误的识别结果。基于本文方法所识别出的目标A,其置信度为98.95%,且本文所提出的方法对识别目标A的支持度最高,高于仅采用Murphy组合规则的识别结果2.75%。步骤5)中所述的目标识别与决策得以完成。
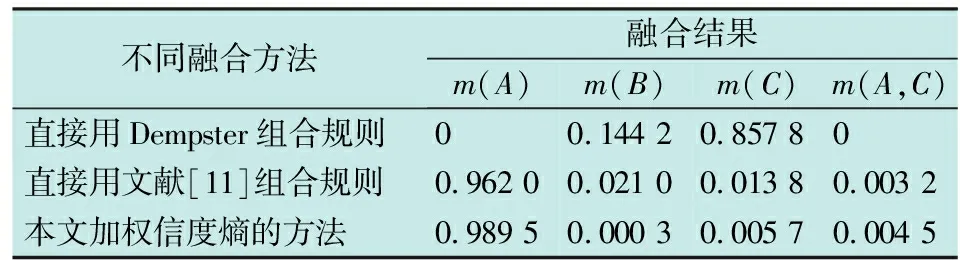
表3 不同方法的算例数据融合结果Table 3 Fusion results of the example data of different methods
5 结论
本文在D-S证据理论框架下,提出了基于Deng熵理论的加权信度熵以度量信息不确定度。新的信度熵不仅包含了传统信度熵中mass函数所涉及的不确定信息,还建模了辨识框架的规模信息。据此,通过处理信息源中的更多信息,使得信息处理过程中的信息损失减少。随后,基于新的加权信度熵,提出了一种传感器冲突数据融合与目标识别方法。通过算例分析与实验结果比较,验证了本文方法的合理性和有效性。
参考文献
[1] 张堃,周德云,王谦,等.基于模糊决策树的机载多传感器智能管理方法[J].计算机应用,2011,31(12):3255-3257.
[2] 王越,周德云,杨维,等.多种异类传感器联合跟踪的异步航迹融合算法[J].弹箭与制导学报,2014,34(2):153-156.
[3] 柳毅,高晓光,卢广山,等.基于加权证据组合的多传感器目标识别[J].系统工程与电子技术,2003,25(12):1475-1477.
[4] 宋建辉,张俊,刘砚菊,等.基于LBP-PCA的多传感器目标识别算法[J].火力与指挥控制,2017,42(2):60-63.
[5] DEMPSTER A P.Upper and lower probabilities induced by a multivalued mapping[J].Annals of Mathematical Statistics,1967,38(2):325-339.
[6]SHAFER G.A mathematical theory of evidence[M].Princeton:Princeton University Press,1976.
[7] YANG Y,HAN D.A new distance-based total uncertainty measure in the theory of belief functions[J].Knowledge-Based Systems,2016,94:114-123.
[8] SONG Y,WANG X,LEI L,et al.Uncertainty measure for interval-valued belief structures[J].Measurement,2016, 80:241-250.
[9] DENG Y.Deng entropy[J].Chaos Solitons & Fractals, 2016,91:549-553.
[10] DENG Y,SHI W,ZHU Z,et al.Combining belief functions based on distance of evidence[J].Decision Support Systems,2004,38(3):489-493.
[11]MURPHY C K.Combining belief functions when evidence conflicts[J].Decision Support Systems,2000,29(1):1-9.
猜你喜欢
法律方法(2022年2期)2022-10-20
上海文化(文化研究)(2022年3期)2022-06-28
数学年刊A辑(中文版)(2022年4期)2022-02-16
世界科学技术-中医药现代化(2021年7期)2021-11-04
数学年刊A辑(中文版)(2019年3期)2019-10-08
中国外汇(2019年7期)2019-07-13
系统工程与电子技术(2016年4期)2016-08-24
中国学术期刊文摘(2016年1期)2016-02-13
管理现代化(2016年6期)2016-01-23
听力学及言语疾病杂志(2015年5期)2015-12-24