智能抠苗机器人
2018-06-23 03:35山东省肥城市泰西中学高二15杨书翰
发明与创新 2018年30期
文 山东省肥城市泰西中学高二(15)班 杨书翰
在我国,棉花、花生等农作物的种植管理都采用膜下播种、膜上抠膜放苗的形式。目前国内对抠膜机械的研制依然处于空白状态,绝大多数的抠膜任务依然需要人工完成,劳动力成本高、生产效率低。
针对此问题,我研制了一款基于颜色识别智能抠苗机器人的原理机,为抠苗机械的研制提供思路。
一、工作原理
智能抠苗机器人以循迹小车为主体,在循迹小车前端安装绿色传感器和自主设计的定点切割执行机构,由单片机构成的中央处理系统处理各个传感器发来的检测信号,并做出命令反应。
1.循线行走原理
在地膜上喷涂一条黑色标示线,安装在循迹小车前端的一对红外传感器分别处于黑色标示线的两侧,并不断发射红外线。
前进中的小车发生偏移时,相应一侧红外传感器发出的红外线被地膜黑线吸收,单片机检测不到该侧反射回来的红外线,单片机发出控制信号,降低该侧行走电机的转速,将航向调正确,实现自主巡线行走。实验过程如图1所示。
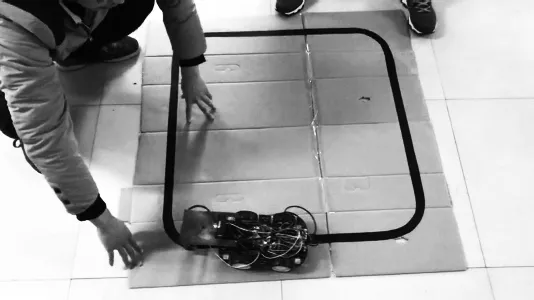
图1 机器人自动循线实验
2.幼苗识别和定点抠膜放苗原理
在机器人前端安装绿色传感器,当绿色传感器移动到幼苗上方时,反射的绿色光线进入传感器,改变传感器的输出信号。此时单片机检测到信号的改变,将发出命令控制机器人停止行驶,并给抠苗执行机构的电磁推拉杆线圈施加电压,使推拉杆下落。推拉杆下端连接的直流电机带动高速旋转的割膜刀片下压,完成膜上开孔放苗作业。
二、结构设计
基于颜色识别智能抠苗机器人整体结构如图2所示。

图2 智能抠苗机器人实物图
1.智能小车的选用
经过对比,本文选用市场上技术较成熟的智能循线机器人小车,此款小车可以实现程序的二次烧录,便于对机器人的进一步开发。
2.切割执行机构
切割执行机构是智能机器人的核心部件,它包括电磁推拉杆、减速电机和切割刀片,如图3所示。当遇到绿色点位时,切割刀片下降切割作业,离开时刀片上升。为完成这一工作,我运用了电磁推拉杆。电磁推拉杆下端绑定带有切割刀盘的减速电机。

图3 定点切割执行机构
三、编程
程序是整个智能抠苗机器人的灵魂,没有合理有序的程序,小车就无法完成预先设定的工作。
1.设定工作流程
智能抠苗机器人依靠前端的红外传感器接收信号,沿预设的黑色线路循迹行驶,红外传感器触碰黑线时接收不到反馈信号。在黑线之外时,可以接收到反馈信号。
黑线旁边每隔一段距离分布有代表绿色幼苗的绿色涂点,当小车前方的颜色传感器识别到绿色后,小车自动停止3s。在此时间内,抠苗执行机构完成下降、切割、上升的工作流程。
2.小车的程序
程序框图如图4所示。

图4 基于颜色识别的智能抠苗机器人工作程序图
多次试验表明,基于颜色识别的智能抠苗机器人完全可以按照预设的流程工作,执行机构工作流畅,整机系统运行平稳。
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
湘潭大学自然科学学报(2022年2期)2022-07-28
锻压装备与制造技术(2021年3期)2021-08-13
电子制作(2017年1期)2017-05-17
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
电子制作(2016年11期)2016-11-07
铁道机车车辆(2016年3期)2016-10-25
导航定位与授时(2014年2期)2014-04-27
振动、测试与诊断(2014年4期)2014-03-01