
浮吊虚拟模型建立及动态特性分析*
2018-06-25 08:16吴学志
汽车实用技术 2018年11期
吴学志
(上海海事大学物流工程学院,上海 201306)
前言
我国有漫长得海岸线和辽阔领海,海洋资源很丰富,但是目前对于海洋资源开采还处于初期,因此在这方面会需要大量的海洋装备,而浮吊作为海洋装备中必不可少的装备之一,对于浮吊的研究也就成为目前研究的热点和难点。本文主要采用虚拟样机建立一个六自由度平台和浮吊模型,模拟海上起重船起吊重物的过程。分析在这个过程中吊物的动力学特性。
1 建立模型
目前常用的三维建模软件有很多,功能也都相似,在论文中采用 UG。UG(Unigraphics NX)是 Siemens PLM Software公司出品的一个产品工程解决方案,它为用户的产品设计及加工过程提供了数字化造型和验证手段。UG是一个交互式CAD/CAM系统,它功能强大,可以轻松实现各种复杂实体及造型的建构。NX 优于通用的设计工具,具有专业的管路和线路设计系统、钣金模块、专用塑料件设计模块和其他行业设计所需的专业应用程序[1]。
ADAMS,即机械系统动力学自动分析,该软件是美国机械动力公司开发的虚拟样机分析软件。ADAMS已经被全世界各行各业的数百家主要制造商采用。ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线[2]。
1.1 三维模型
UG拥有很丰富的建模工具,在这里参照Stewart结构先绘制六自由度平台的零件图,包括上片台面、万向节、刚体、底座等几大部分,保存零件。在装配图中导入这些零件,进行装配,装配的目的是约束零件的自由度,使得整体装配能够满足设计的要求。在UG的装配模块中,选择约束装配,添加零件,装配图如图1所示。

图1 三维模型
1.2 导入ADAMS
ADAMS软件虽然有三维建模能力,但是建模没有在UG中方便操作,这也是普遍使用UG建模,然后导入ADAMS的原因。
在UG中建好的三维模型全部选中,导出,选择输出格式为Parasolid格式。打开ADAMS软件,选择文件-导入-格式 Parasolid-选择保存文件-新建模型,这样就可以导入三维模型。但是此时的模型并没有任何约束,这是由于 ADAMS不识别UG中添加的约束,只保留零件之间位置关系,因此需要重新添加约束,并且两次添加约束的方式有所不同。
在上平台底面固定三个铰支座,每个铰支座安装两个万向节,每个万向节连接一个缸杆,因此,在连接位置添加万向副,对于杠杆和刚体采用圆柱副。六自由度平台底座同样是三个铰支座,约束方式与上平台相同。平台与吊架采用固定副约束,使得吊架完全跟随平台一起运动。此时,对于刚体部分已经全部完成。对于仿真还需要添加绳索和吊重,在ADAMS的2013版本中,有很丰富的机械包,其中就有绳索模块,通过设置绳索模块的一些参数,如锚点布置、滑轮位置、滑轮尺寸、绳索直径等(其他参数可以默认)。通过这些设置,得到动力学模型如图2所示。
2 动力学模型仿真
在开始仿真之前,定义模型的坐标方向,垂直于平台向上为Z轴方向,吊架方向为X轴正向,其余轴的方向采用笛卡尔坐标系设定。依据由非线性振动的相关研究知,X、Y轴方向的频率接近球摆的固有频率。系统具有最大响应值。当Z向激励频率接近吊物系统固有频率的2倍时,将出现最大响应值,此时参变激发现象最易发生[3][4]。根据这个结论设置仿真条件。
2.1 激励频率对摆动影响
为了方便对激励描述,设置如下表达式:

式中的X、Y、Z为三个轴向激励;AX、AY、AZ为激励的幅值;ω为激励频率。
为了研究外界激励频率对吊物系统的摆动影响,设定只改变激励频率的响应,AX、AY、AZ分别为0.01m、0.01m、0,01m;由于此时绳索长度只有 1m,那么系统的固有频率为3.13rad/s,根据前面的参考结论,设定X、Y、Z方向的激励频率分别为2.5rad/s、3.13rad/s、3.75rad/s。仿真200s,得到吊物摆角如图3、图4、图5所示。

图3 激励频率3.13rad/s
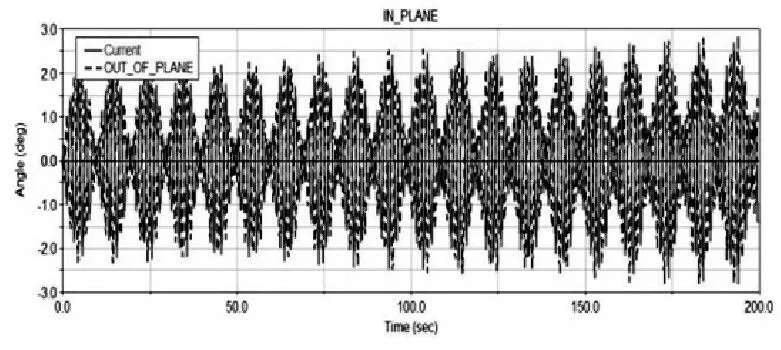
图4 激励频率2.5rad/s
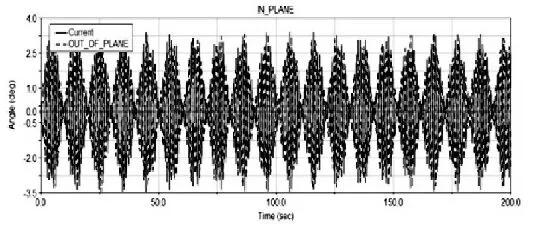
图5 激励频率3.75rad/s
从图3、图4、图5中得出,当激励频率为3.13rad/s时,吊物的摆动角度最大,可达62.19°;激励频率为2.5rad/s时,吊物摆角最大 2.86°;激励频率为 3.75rad/s时,最大摆角为3.39°。通过分析数据可知,激励频率为3.13rad/s时,重物产生的摆角最大,这与参考的论文结论一致。由于此时激励频率等于系统固有固有频率,产生共振引起的。
2.2 绳索长度对摆动影响
设置此时激励频率为 3.13rad/s,AX、AY、AZ分别为0.01m、0.01m、0,01m;改变绳索长度为1m、1.2m、0.8m。设置仿真时间 200s。重物的面内角和面外角如图 6、图 7、图8所示。

图6 绳索长度1m

图7 绳索长度0.8m

图8 绳索长度1.2m
从图6、图7、图8,由于图6与前一节图3是一致的,绳索长度为0.8m时,最大摆角为6.8°;绳索长度为1.2m时,最大摆角5.6°。从这些数据看出,绳索长度为1m时,重物的摆角最大。
3 结论
通过在ADAMS中建立浮吊系统的动力学模型,并对其仿真,分析外界激励频率对系统的摆动影响,通过设置不同激励频率,采集在各个频率下最大摆动角度,得出激励萍率接近于系统固有频率时,吊物系统的摆角最大。同时改变绳索长度,得出重物摆动响应的规律。
[1] 袁文武,蔡慧林,任刚.基于UG和ADAMS的齿轮啮合动力学仿真[J].煤矿机械, 2010, 31(2):40-43.
[2] 李旭.悬臂式掘进机关键结构的力学特性研究[D].中国矿业大学(北京), 2017.
[3] 吕宏松.起重船吊物系统动态特性分析及模型实验研究[D]. 华中科技大学,2009.
[4] 芮光六.起重船吊物系统的摆动分析及其控制研究[D].天津大学,2004.
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
黑龙江大学自然科学学报(2022年1期)2022-03-29
散文诗世界(2022年1期)2022-01-13
孩子(2019年7期)2019-07-29
当代陕西(2019年10期)2019-06-03
小学阅读指南·低年级版(2017年1期)2017-03-13
中学物理·高中(2016年8期)2016-08-08
人生十六七(2015年6期)2015-02-28
计算机辅助工程(2012年5期)2012-11-21
