自动行走设备回归对接控制系统
2018-07-09 01:17
电动工具 2018年3期
授权公告号:CN104750104B
授权公告日:2018.05.08
专利权人:苏州宝时得电动工具有限公司
发 明 人:刘芳世 周昶
随着科学技术的发展,智能自动行走设备为人们所熟知,由于自动行走设备可以自动根据预先设置的程序执行预先设置的相关任务,无须人为操作与干预,因此在工业应用及家居产品上应用广泛。工业应用如执行各种功能的机器人,家居应用如割草机、吸尘器等,这些智能设备带来了极大的便利。这些自动行走设备由于采用能量储存单元供电,当能量储存单元的能量被用尽后,自动行走设备就无法工作了,此时必须人为地把自动行走设备移动到能为其提供能量的充电站,为其补充能量。在一些情况下,补充能量可能需要花费数小时的时间,人们必须等待数小时,直到补充能量完成,才能再次开启自动行走设备,使其继续工作。
为克服上述问题,一些充电装置应运而生,充电装置能协助自动行走设备确认设备与充电站对接成功,并在对接成功后,为自动行走设备充电。因此,如何实现自动行走设备与充电站的自动对接是需要研究的一个热点问题
该发明涉及自动化控制领域,特别是涉及一种自动行走设备回归对接控制系统。
发明内容
一种自动行走设备回归对接控制系统,用于将自动行走设备与充电站对接,自动行走设备回归对接控制系统包括用于安装在充电站上的第一信号发生器、用于安装在自动行走设备上的移动磁场传感器和连接于所述第一信号发生器的边界线,自动行走设备回归对接控制系统还包括第二信号发生器、固定磁场传感器,第二信号发生器用于安装在自动行走设备上并产生电磁场信号,固定磁场传感器用于安装在充电站上并检测第二信号发生器产生的电磁场信号。
自动行走设备回归对接控制系统还包括控制单元,控制单元连接于移动磁场传感器并设置在自动行走设备内,用于接收移动磁场传感器接收到的电磁场信号,并根据电磁场信号控制自动行走设备行走。
控制单元包括信号处理单元和连接于信号处理单元的微处理器,信号处理单元接收移动磁场传感器接收到的电磁场信号并生成处理信号,微处理器根据所述处理信号控制所述自动行走设备行走。
第二信号发生器连接于控制单元,控制单元控制第二信号发生器开始或者停止发射电磁场信号。
边界线产生的电磁场信号根据频率、脉宽或者编码变化,第一信号发生器控制边界线产生的电磁场信号的变化。
第二信号发生器包括电感。在其中一个实施例中,电感为线绕式电感器。在其中一个实施例中,所述电感为非线绕式电感器。
上述自动行走设备回归对接控制系统包括用于安装在自动行走设备上的第二信号发生器,在充电站上增加固定磁场传感器。第二信号发生器能产生电磁场信号。回归对接时,自动行走设备通过移动磁场传感器检测到碰触边界线时转弯再随机直线行走,当行走到充电站附近,充电站上固定磁场传感器接收到了自动行走设备通过第二信号发生器发射的电磁场信号时,第一信号发生器改变边界线产生的电磁场信号,此时第二信号发生器检测到边界线产生的电磁场信号进行了改变便能判断自动行走设备已处于充电站附近,自动行走设备便行进到充电站附近的边界线实现回归对接。
实施方式
为了解决如何实现自动行走设备与充电站的自动对接的问题,该发明提供了一种自动行走设备回归对接控制系统。结合具体的实施例,对自动行走设备回归对接控制系统进行具体描述。
参考图1和图2,提供的自动行走设备回归对接控制系统包括第一信号发生器100、移动磁场传感器200、边界线300、第二信号发生器400以及固定磁场传感器500。该自动行走设备回归对接控制系统用于将自动行走设备与充电站对接。
充电站700根据实际需要固定在地面上某一合适位置,自动行走设备600需要充电的时候只需行进至充电站700所在位置进行对接即可。
边界线300与充电站700连接并设置在地面上,设置在地面上的边界线300可以规划出自动行走设备600的工作区域。一旦边界线300规划出自动行走设备600的工作区域之后,自动行走设备600便被限制在上述工作区域之内行走了。
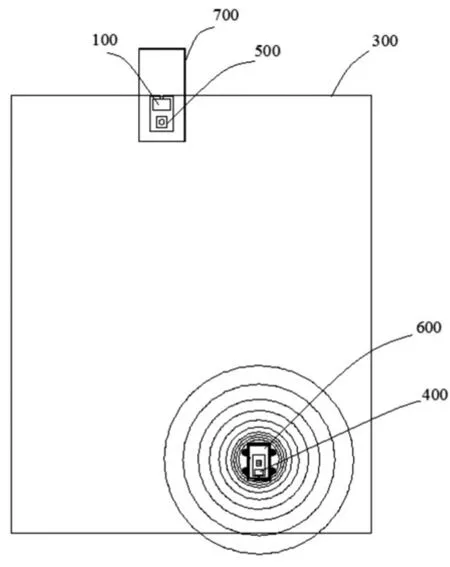
图1

图2
第一信号发生器100和固定磁场传感器500是安装在充电站700上的。同时,边界线300连接在第一信号发生器100上。其中,第一信号发生器100可以产生信号控制边界线300发射电磁场信号。在本实施方式中,边界线300产生的电磁场信号可以根据频率、脉宽或者编码变化,第一信号发生器100能够控制边界线300产生的电磁场信号的变化。固定磁场传感器500可以检测到第二信号发生器400产生的电磁场信号。
结合图2,移动磁场传感器200与第二信号发生器400是安装在自动行走设备600上的。移动磁场传感器200可以检测到边界线300产生的电磁场信号,同时,随着自动行走设备600的移动,安装在自动行走设备600上的移动磁场传感器200检测到的边界线300产生的电磁场信号的强度或方向也不是恒定不变的。这样,通过对移动磁场传感器200检测到的边界线300产生的电磁场信号的强度或方向的分析即可引导自动行走设备600逐渐接近充电站700。第二信号发生器400可以产生电磁场信号,并且随着自动行走设备600的移动,固定磁场传感器500检测到的安装在自动行走设备600上的第二信号发生器400产生的电磁波的强度或方向也不是恒定不变的。这样,通过对固定磁场传感器500检测到的第二信号发生器400产生的电磁波的强度或方向的分析即可引导自动行走设备600与充电站700完成对接。上述移动磁场传感器200或者固定磁场传感器500根据接收到的相应的电磁场的强度引导
自动行走设备600与充电站700对接的过程可以依据如下原理:
移动磁场传感器200检测到边界线300产生的电磁场信号后,首先检测出该电磁场信号的强度和方向,然后判断该电磁场信号的强度是否接近预设边界值,如果是,说明自动行走设备600已经行进至接近边界线300的位置,此时可以控制自动行走设备600转弯继续行走,为了提高对接效率,这里自动行走设备600转弯应当向进一步靠近充电站700的一边转,这只需要根据接收到的电磁场信号的方向即可控制自动行走设备600向需要的方向转弯;如果不是,则自动行走设备600继续行走、转弯直至行进至充电站700附近。结合图3,当自动行走设备600行进至充电站700附近时,还要实现将自动行走设备600与充电站700完成最后的对接,即将充电站700的充电插头(为了说明清楚,附图说明中已经将“充电插头”用标号710标示出)插入自动行走设备600的充电口中。为了完成这个最后的对接过程,可以在自动行走设备600上安装一个摄像头,从而利用图形识别或者红外线实行精确对接。另外,还可以采用如下实施方式完成最后的对接:
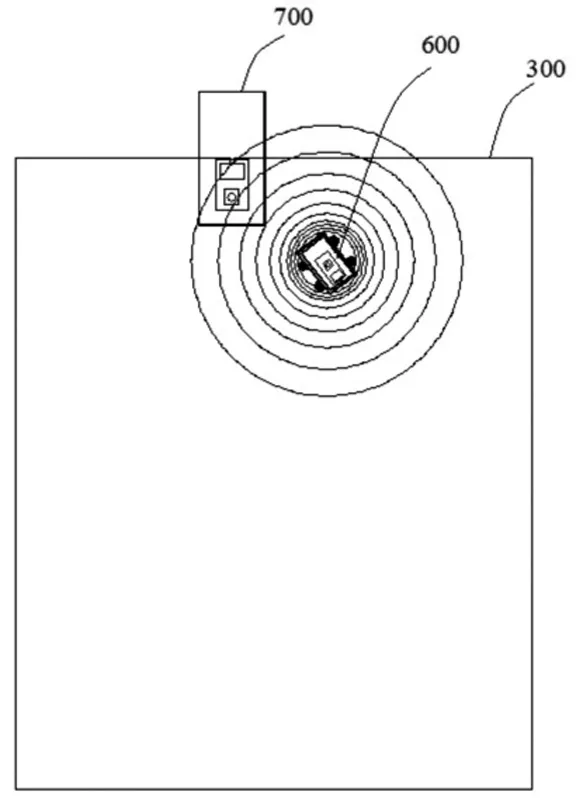
图3
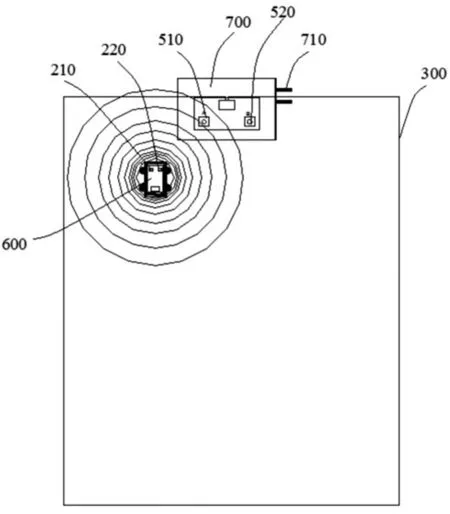
图4
参考图4,移动磁场传感器200可进一步包括第一移动磁场传感器210和第二移动磁场传感器220。对应地,充电站700上的固定磁场传感器500进一步包括第一固定磁场传感器510和第二固定磁场传感器520。当自动行走设备600在充电站700的左面时,因为第一固定磁场传感器510相比于第二固定磁场传感器520更接近自动行走设备600,所以第一固定磁场传感器510感应到的自动行走设备600的电磁强度大于第二固定磁场传感器520感应到的电磁强度。从而充电站700向自动行走设备600发出相应信号,使自动行走设备600感知后知道其处于充电站左面。随后自动行走设备600调整移动方向,直到行走至充电站700的右面。而如果开始自动行走设备600就在充电站700的右面时,则直接进行后续对接过程即可。
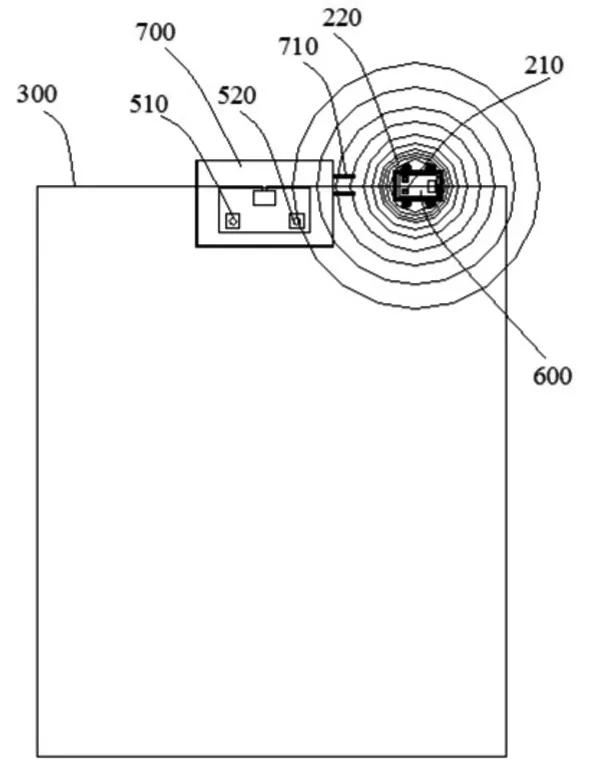
图5
请参考图5,当自动行走设备600获知行走至充电站700右面时,自动行走设备600移动到边界线300上,根据电磁场信号的方向使第一移动磁场传感器210处在边界线300划定的区域内部,使第二移动磁场传感器220处在边界线300划定的区域外部,从而实现跨边界线。之后自动行走设备600跨线直线前进,即可实现与充电站700精确对接。这里需要指出的是,为了配合这种跨边界线对接方式,本实施方式中充电站700上的充电插头的两个电极分别位于边界线300的两侧。
自动行走设备回归对接控制系统还包括控制单元800。控制单元800连接于移动磁场传感器200并设置在自动行走设备600内。控制单元800用于接收移动磁场传感器200接收到的电磁场信号,并根据电磁场信号控制自动行走设备600行走。进一步地,控制单元800包括信号处理单元810和连接于信号处理单元810的微处理器820。信号处理单元810能够接收移动磁场传感器200接收到的电磁场信号并生成处理信号,然后微处理器820根据该处理信号控制自动行走设备600行走。
另外,第二信号发生器400连接于控制单元800。这样,控制单元800即可控制第二信号发生器400开始或者停止发射电磁场信号。在本实施方式中,只有当自动行走设备600开始回归对接充电站700时,控制单元800才控制第二信号发生器400开始发射电磁场信号。而当自动行走设备600与充电站700完成对接时,控制单元800会控制第二信号发生器400停止发射电磁场信号。这样,可以尽量节省第二信号发生器400因发射电磁场信号而消耗的能量。
此外,第二信号发生器400包括电感410。通过控制流过电感410的电流即可方便地控制第二信号发生器400产生的电磁场信号。在本实施方式中,电感为线绕式电感器或者非线绕式电感器。
上述自动行走设备回归对接控制系统包括用于安装在自动行走设备600上的第二信号发生器400,在充电站700上增加固定磁场传感器500。所述第二信号发生器400能产生电磁场信号。回归对接时,自动行走设备600通过所述移动磁场传感器200检测到碰触边界线300时转弯再随机直线行走,当行走到充电站700附近,充电站700上固定磁场传感器500接收到了自动行走设备600通过第二信号发生器400发射的电磁场信号时,第一信号发生器100改变边界线300产生的电磁场信号,此时第二信号发生器400检测到边界线300产生的电磁场信号进行了改变便能判断自动行走设备600已处于充电站700附近,自动行走设备600便行进到充电站700附近的边界线300实现回归对接。
此外,控制单元800只有在当自动行走设备600开始回归对接充电站700时才控制第二信号发生器400开始发射电磁场信号,因此可以节省第二信号发生器400因发射电磁场信号而消耗的能量。
上述实施例仅表达了该发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对该发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离该发明构思的前提下,还可以做出若干变形和改进,这些都属于该发明的保护范围。因此,该发明专利的保护范围应以所附权利要求为准。
猜你喜欢
机电安全(2022年5期)2022-12-13
第二课堂(课外活动版)(2022年5期)2022-05-25
空间科学学报(2021年6期)2021-03-09
环球时报(2020-12-08)2020-12-08
房地产导刊(2020年6期)2020-07-25
学生天地·小学中高年级(2018年5期)2018-09-07
学生天地(2018年14期)2018-09-07
智慧少年(2017年8期)2018-01-10
石油地球物理勘探(2017年4期)2017-12-18
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01