
基于EMD的微裂缝超声回波信号去噪算法
2018-07-10 03:39常晓丽柴艳丽
测试技术学报 2018年4期
常晓丽,朱 岩,柴艳丽,张 鹏
(1. 中北大学 信息与通信工程学院,山西 太原 030051;2. 中国航空工业集团公司 北京长城计量测试技术研究所,北京 100095)
0 引 言
激光外差干涉法是激光超声在光学非接触测量中一种常用的光学干涉法[1,2],该检测方法不需要将探测器与被测材料表面接触,因此,被测材料表面粗糙度和耦合剂对检测没有影响,使其应用更为灵活. 激光外差干涉法的检测依赖于光路传递的光信号,及在被检测材料表面激励产生的超声脉冲信号[3],而这两种信号在激光超声检测过程中极易混入大量噪声信号,从而使被测材料表面的微裂缝信息淹没在噪声信号里. 解调出的超声回波信号同时包含微裂缝信号和各种噪声信号,是一种非平稳、非线性信号,不易从中直接提取微裂缝信息. 因此,为了提高激光外差干涉法检测微裂缝的灵敏度和可靠性,需要对带有大量噪声的超声回波信号进行去噪处理.
经验模态分解(empirical mode decomposition, EMD)是一种自适应的时频分解算法,该算法首先将带有噪声的原始信号分解为一系列具有从高频到低频逐级分布特征的固有模态函数(intrinsic mode functon, IMF)分量[4],然后将包含被检测材料表面微裂缝信息的若干IMF分量进行重构,从而实现对原始信号的去噪. 与传统的去噪方法相比,EMD算法不需要预先选择基函数便能根据原始信号的特征进行自适应时频分解,因而具有更强的去除噪声的能力. 本文根据实际解调出的超声回波信号存在大量噪声且信号自身的频谱结构比较复杂的特点,使用EMD算法对超声回波信号进行去噪处理.
1 激光外差干涉法检测系统
激光外差干涉微裂缝检测系统如图 1 所示,主要包括大功率YAG激光器、反射镜M1、反射镜M2、反射镜M3、反射镜M4、分束器、He-Ne激光器、声光调制器、被测样件等. 大功率YAG激光器发出激光,照射到被测样件表面,使被测样件表面激发产生超声振动脉冲信号. 该超声振动脉冲信号沿被测样件表面传播,当传播到被测样件表面的微裂缝时,将产生一个回波信号. 该回波信号沿超声振动脉冲信号的反方向传播到被测样件表面上的探测点. He-Ne激光器发出的激光经过声光调制器后被分为两束光: 参考光和信号光. 参考光经反射镜M1和M2反射后进入分束器,将信号光照射到被测样件表面的探测点,被测样件表面的超声振动使信号光的相位发生偏移,信号光再经反射镜M3和M4反射后进入分束器. 最终,参考光和信号光经过分束器进入光电探测器实现两光束的干涉.
在激光外差干涉检测系统中,光电探测器接收到参考光和信号光经过干涉后,其输出的光电流为[5]
(1)
式中:A为光电流中的直流分量;B为参考光和信号光经光电探测器干涉后的信号调制度;u(t)为被测样件反射回光电探测器的超声回波信号; Δφ为参考光与信号光之间的初始相位差.
由式(1)可知,光电探测器输出的光电流为相位调制信号. 根据激光外差干涉法原理,如果被测样件表面某处存在裂缝,超声振动脉冲信号的一部分能量将在该处反射回探测点,信号光将产生 4πu(t)/λ的相位移. 信号光相位移中的u(t)带有被测样件表面裂缝的超声回波信号,通过u(t)的波形可以获取超声脉冲在裂缝处和探测点之间往返的时间,将该时间乘以超声脉冲在被测样件中的传播速度,可得到裂缝的位置和大小等信息.
2 基于EMD的去噪算法
EMD算法是一种自适应的时频分解方法,该算法首先将复杂的信号分解为一系列固有模态函数 (intrinsic mode functon, IMF),在每一时刻只有单一频率成分. 分解后的IMF分量具有从高频到低频逐级分布的特征,最低频的残余量一般表现为原始信号的趋势或均值.
对于某一个带有噪声的信号y(t),EMD的一般步骤为:
1) 求出y(t)的所有极大值和极小值;
2) 利用插值函数将y(t)的所有极大值和极小值分别构成包络曲线,得到信号y(t)的上包络曲线fmax(t)和下包络曲线fmin(t). 并求包络的均值
h(t)=(fmax(t)+fmin(t))/2.
(2)
3) 求解m1(t)=y(t)-h(t),然后判断m1(t)是否满足IMF的条件[6]. 若满足,则提取该IMF,令c1(t)=m1(t),并令y(t)=y(t)-c1(t); 否则,y(t)=m1(t);
4) 重复步骤1)~3),直到提取出所有的ci(t),(i=1,2,…,n),最后剩余趋势项(或称残差)r(t).
通过上面的迭代过程,信号y(t)可表示为
(3)
利用EMD算法将带有噪声的信号y(t)进行分解,可以得到有限个按频率高低排列的IMF分量. 超声回波信号所包含的微裂缝信息主要存在于低频段,而高频段一般是尖锐信号或噪声. 因此,只要能够确定某一个IMF分量,在该IMF分量之前的分量中噪声是主要部分,而之后的IMF分量中主要成分是包含微裂缝信息,那么由这些IMF分量进行重构就可以实现在去噪的同时,完整地保留超声回波信号中微裂缝的特征信息. IMF分量重构信号的表达式为
(4)
3 实验结果与分析
实验使用波长1.06 μm,脉宽50 ns和能量为50~60 mJ的YAG电光调Q激光脉冲入射被测样件表面,在被测样件内部激励超声场. 单模He-Ne激光器作为探测光源,使用尺寸为50×30×10 mm3且在25 mm处有一微小裂缝的铝板作为被测样件. 实验获得光电探测器输出的调相信号如图 2 所示,该信号反映了超声脉冲从被激发到遇裂缝反射回来的情形. 对图 2 所示的信号进行解调,得到如图 3 所示的超声回波信号.
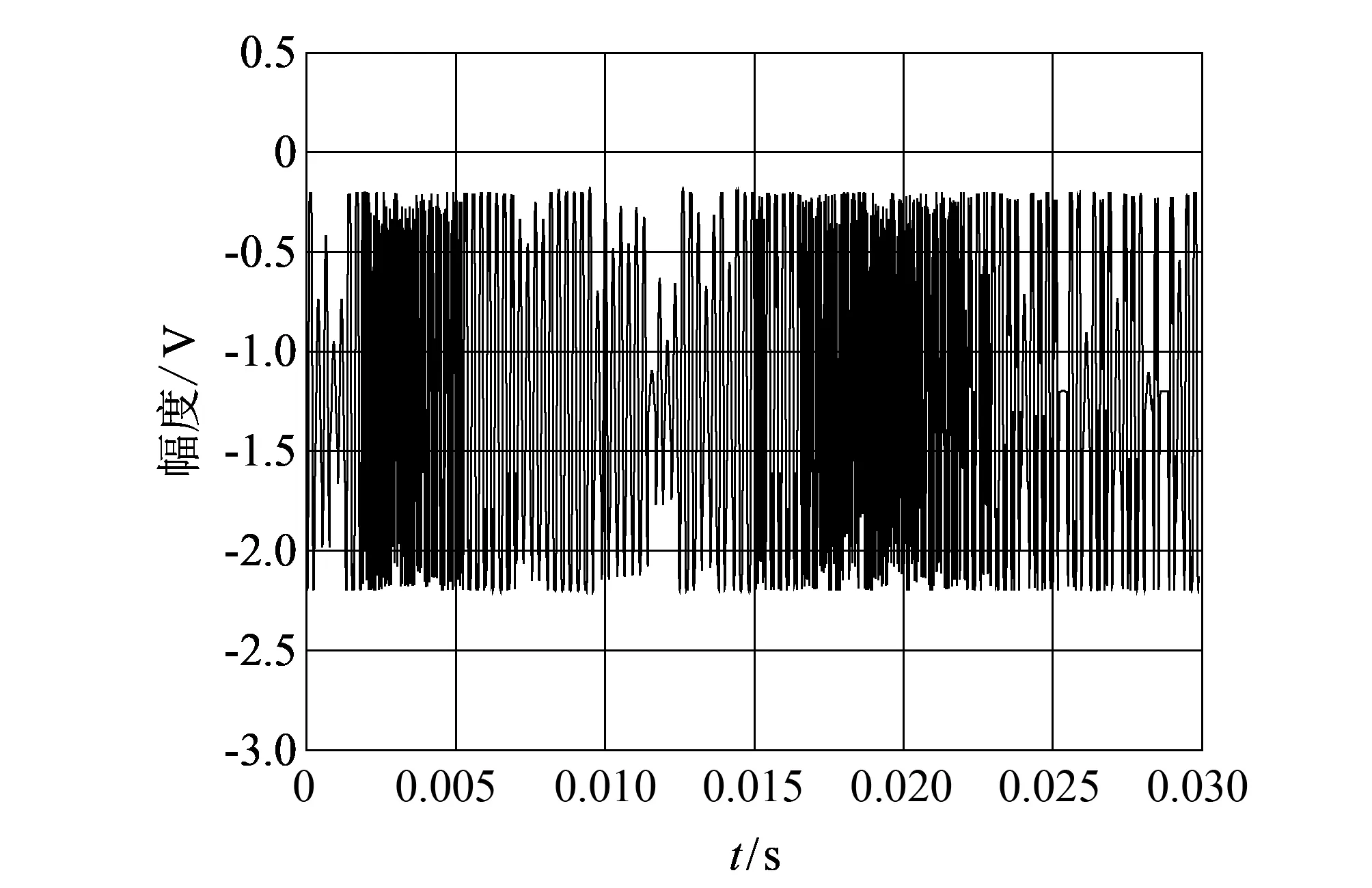
图 2 光电探测器输出的调相信号Fig.2 Phase modulation signal from photoelectric detector
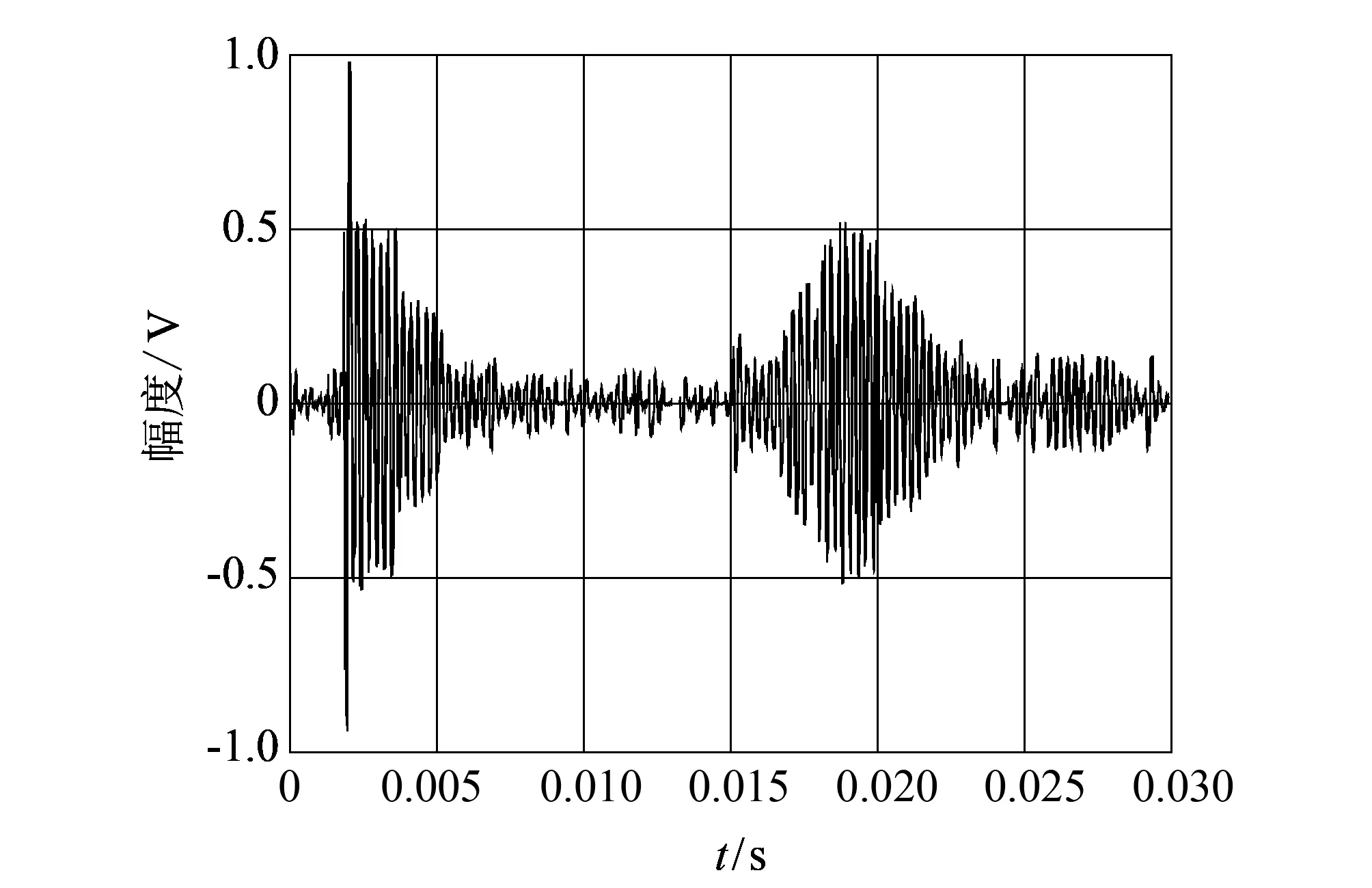
图 3 超声回波信号Fig.3 The ultrasonic echo signal
如图 3 所示,超声回波信号包含被测样件表面微裂缝信息和大量的噪声成分. 使用EMD算法对超声回波信号进行分解,如图 4 所示. 利用EMD算法对包含被测样件表面微裂缝信息和大量噪声成分的超声回波信号进行分解后,按频率高低得到8层IMF分量. 其中,第3层到第8层的IMF分量主要包含微裂缝的位置和大小信息,而第1层和第2层IMF分量主要包含大量的噪声成分. 因此,将第3层到第8层的IMF分量进行重构,就可以实现在去噪的同时,保留超声回波信号中微裂缝的特征信息. 经过IMF分量重构,超声回波信号如图 5 所示.
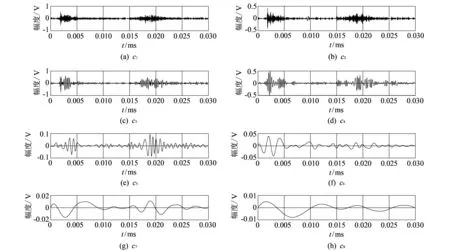
图 4 EMD分解超声回波信号的IMF分量 Fig.4 IMF components of the ultrasonic echo signal by EMD
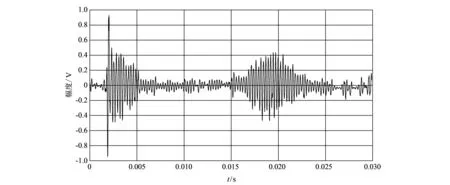
图 5 重构后的超声回波信号 Fig.5 Reconstructed ultrasound echo signal
如图 5 所示,与去噪前的超声回波信号相比,原始信号中的大部分噪声已被去除. 由重构后的超声回波信号可得到超声回波信号的两个峰值脉冲之间的时间差为t=0.015 8 ms,计算得到被测样件上的裂缝与探测点之间的距离为d=25.6 mm,误差率为δ=1.02%.
4 结 论
本文针对解调出的激光超声回波信号带有大量噪声的特点,研究了利用EMD算法实现微裂缝超声回波信号的去噪算法,并将EMD算法运用到实验获得的超声回波信号,对超声回波信号进行分解,按频率高低得到IMF分量,去掉主要成分为噪声的IMF分量后,将包含微裂缝特征信息的IMF分量重构,实现了对超声回波信号的去噪处理. 实验结果表明,利用EMD能够有效去除超声回波信号中的噪声信号,得到的被测样件微裂缝的距离与实际距离的误差率为1.02%,提高了激光外差干涉法检测微裂缝位置的精确度,同时,也能够为近一步判断微裂缝的大小提供有效的帮助.
猜你喜欢
科学技术创新(2022年30期)2022-10-21
数学物理学报(2022年3期)2022-05-25
数学物理学报(2019年5期)2019-11-29
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
英美文学研究论丛(2018年1期)2018-08-16
电子制作(2018年10期)2018-08-04
中成药(2017年12期)2018-01-19
锻造与冲压(2014年20期)2014-10-10
汽车与新动力(2013年3期)2013-03-11
