
一种深海机械手捕捞采集设备设计*
2018-07-11 00:25郑海烈廖钊华刘哲明
机械研究与应用 2018年3期
郑海烈,李 川,廖钊华,刘哲明
(东莞理工学院 机械工程学院, 广东 东莞 523000)
0 引 言
随着科学技术的快速发展,人们将视野从海上转移到海底,人们正在加大对海底的探索,例如中国研制“蛟龙号”载入深潜器,对深海进行探索。但要想探索神秘的海底世界,特别是深海,对海底的生物、水文和土壤的取样必不可少,但由于人类自身的局限性无法通过潜水器直接下水采样,而通过像载人深潜设备间接使用机械手采样,由于设备需保障和维持人们的生存而显得笨重,而且每次下潜需要大量时间进行大量的准备工作,虽然是为了确保设备的正常运行从而保障潜航员的安全,但却减低了工作效率[1]。因此,设计一种代替载入潜水设备进行深海抓取的机器人,即水下捕捞机器人。它不仅能够在深海不受过多限制的环境完成抓取生物、海底土壤取样等一系列水下活动,还保障了人的安全,降低深浅设备的准备时间从而减低工作成本与工作强度,提高工作效率。
1 设计方案
水下勘探机器人分为深潜推进系统、控制系统和机械手。深潜推进系统采用回旋式螺旋桨推进器,实现水下机器人进退、潜浮和转舵[2]。控制系统主要有水面显控分系统、运动控制分系统、传感器分系统、光缆传输分系统。水下捕捞机器人外观图如图1所示。
产品设计采用对称结构,保证了整个水下捕捞机器人的平稳。机械手是两个活动关节和一个抓取夹具组成。机器人为了能够长时间在水下工作,采用了高耐压高强度材料,并利用特殊的减压装置为机器人减少压力。同时,由于水下的环境多变,为进一步增加水下捕捞机器人的平稳性,减少机械手夹取难度,拟采用回旋式螺旋桨推进器对水下机器人施加反方向力,从而平衡水流等造成机器晃动的力。
2 系统组成分析与设计
2.1 沉浮系统分析
在结合了利用空气压缩进行沉浮和利用螺旋桨进行沉浮的两种方式后,并在使用光缆传输水下信号的基础上设计出的沉浮系统。其中,将水下捕捞机器人的内部加入一个活塞式装置,通过活塞的变化,从而改变排水体积进而达到沉浮的效果。其次,在水下捕捞机器人的顶部安装了两个螺旋桨,通过改变螺旋桨的转向以及转速进而达到控制机器人的沉浮以及移动的效果,其沉浮系统运作如图2所示。

图2 沉浮系统运作图
水下捕捞机器人在进行沉浮的过程中,不可避免的受到一些外界因素干扰,从而影响到活塞的运动,从而影响了下潜,在进行沉浮的过程中[3],研究活塞的运动与浮力之间的关系不可或缺的。其中,电机所产生力矩为T,活塞产生的推力为F,则通过计算,可测出活塞推力与电机力矩之间的关系为:
T=i×KF×F
式中:i为传动比,KF为系统传动中增益。活塞的推力F与浮筒内、外的压力平衡为:
F=27πr2(ΔP-ghp)。
2.2 推进系统分析
水下捕捞机器人在水下进行工作时,一般会受到四个阻力,分别是:粘压阻力、摩擦阻力、电缆阻力、附加阻力[4]。而当水下捕捞机器人在水下进行水平方向的移动时,水下捕捞机器人受到主要外力包括:水流体对机器人的阻力,推力系统产生的推力和附加惯性力。则根据线性运算以及对于水下捕捞机器人的实地检测,水下捕捞机器人在进行水平运动的过程中,直线位移与推力器之间的关系一定的不稳定性[5],故加入闭环控制器来稳定系统[6]。
2.3 信号传输系统设计
为了能够使操作者及时快速的收到水下图像从而控制机械手抓取事物,设计了光缆传输系统,光缆传输分系统是将水下的信息传输到水面的的存储器中,并由计算机处理显示这些信息,操作者再根据信息对水下机器人[7]的姿态进行调整,再将调整结果传输到水下机器人,对机器人进行操控。
2.4 辅助装置设计
水下捕捞机器人在进行水下捕捞时,存在捕捞时间较长的可能性,长时间的悬停对操作者的耐力达成了一定要求,故设计了双支架来停放水下捕捞机器人,在同一地点进行长时间悬停时,可将水下机器人停放在一定高度,双支架同时也能避免海底异物对水下机器人的碰撞。设备在底部安装了该双支架,在水下捕捞机器人使用过程中,能够让水下捕捞机器人停放在所捕捞的事物上或者其他物体表面,让使用者更好的操作体验以及降低操作者操作难度。其中,支架简图如图3所示。
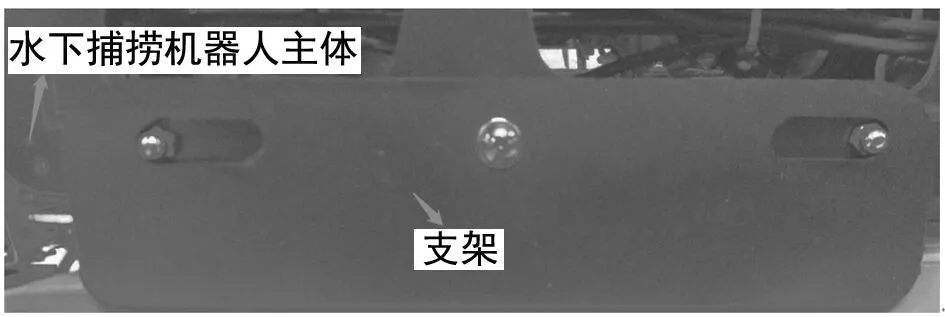
图3 支架简图
3 设备应用的情况与效果
水下捕捞机器人在使用过程性能稳定,能够较好的抓取水下物体,并且在水下进行移动的过程保持良好的性能,经过测试,在水面上波浪汹涌的情况下,水下捕捞机器人仍能保持稳定的动力性能。在水下的捕捞过程中,水下捕捞机器人捕捞效果良好,能够稳定的抓住操作者想要捕捞的物体,具有稳定的性能。图4为水下捕捞实拍影像。

图4 水下捕捞实拍影像
4 结 语
结合我国目前海洋事业的发展以及市场上相应产品的一些不足之处,设计了这款水下捕捞机器人。随着经济的发展,将会有越来越多的水下捕捞作业需求,届时捕捞机器人将大展身手,同时,随着深海探测越发深入,海洋采取样本的必要性也逐渐增强。
猜你喜欢
影像研究与医学应用(2021年15期)2021-09-12
装备制造技术(2020年4期)2020-12-25
航空发动机(2020年3期)2020-07-24
介入放射学杂志(2020年1期)2020-04-11
无线互联科技(2018年20期)2018-12-27
制造技术与机床(2018年11期)2018-11-23
中学科技(2017年10期)2017-11-04
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
中国舰船研究(2014年1期)2014-05-14
