三维空间声源定位实验装置设计
2018-07-11 06:30薛祖刚
新乡学院学报 2018年6期
冯 俊,薛祖刚
(皖西学院 电子与信息工程学院,安徽 六安237012)
随着电子产品的高度智能化,声源定位技术也逐渐被人们所关注。例如:在视频会议中,通过声源定位技术控制摄像头,使其自动转向发言人的方向[1];在武器系统中,根据枪声定位袭击者的方向,从而快速做出反应[2];在机器人导航系统中,利用声音进行室内定位;等等[3-4]。
三维空间声源定位是传感器技术、电子技术、自动控制技术和计算机技术的综合应用。声源定位实验装置具有知识综合性和技术前沿性的双重特点。利用该实验装置可以将多门专业课程的知识融会贯通,从实际应用角度理解专业知识,并学会发现、分析和解决实际工程问题的方法,特别适合作为大学生的综合、创新实验平台使用。我们介绍了经典的空间声源定位算法,并利用教学中常用的元器件设计了声源定位实验装置,通过实验验证该实验装置的有效性和可行性。
1 三维空间声源定位算法
声源定位主要有三种定位技术[5]:基于可控波束形成器的声源定位技术、基于高分辨率空间谱估计声源技术以及时延估计(TDOA)。TDOA定位算法比前两种方法计算量小,也是目前研究的热点[6]。
TDOA算法的基本原理如图1所示。在图1中,动点S是平面坐标系XOY中的声源,声波从S点到达O点和A点的时间分别为tO和tA,则在这两点处接收到声波的时间差△t可近似表示为[7]

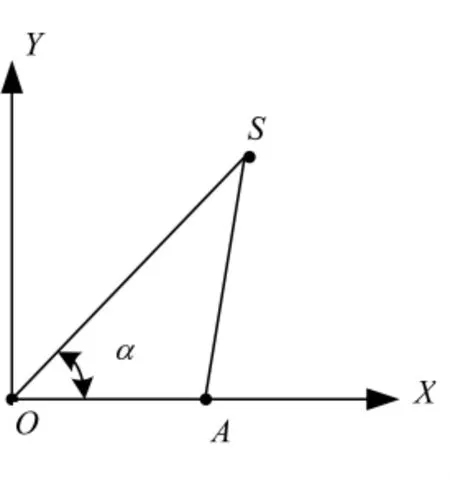
图1 平面坐标系声源定位
推广到空间三维坐标系OXYZ中的情形如图2所示。在图2中,A、B、C 分别是 X、Y、Z坐标轴上的点,且到原点O的距离相等,距离记为L;S与X、Y、Z三坐标轴的夹角分别为记A点和O点接收到声音的时间差为点和O点接收到声音的时间差为Δt2,C点和O点接收到声音的时间差为Δt3。则有利用反三角函数可得通过这三个角度就能够确定声源在三维空间中的位置。为了简化计算,声源S的方向可以利用OS在三维空间上的仰角φ和方位角θ来确定,由图2可知,φ和θ的大小可由
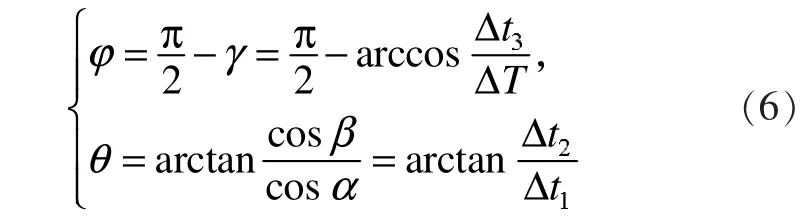
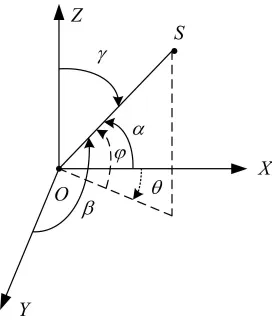
图2 空间坐标系声源定位
2 声源定位系统设计
实验系统主要由发声装置、音频接收装置以及电机驱动装置组成。
2.1 发声装置
声源采用555定时器产生4 kHz方波,通过LM386功放电路驱动喇叭发声,如图3所示。NE555电路的振荡周期为 T=1.1C6(R1+R2+RV1),因 T=1/4 000 s,C6=10 nF,得 R1+R2+RV1≈22.7 kΩ。在图 3 中,R1=3 kΩ、R2=18 kΩ,RV1为4.7 kΩ精密电位器。调节RV1使555定时器的引脚3发出4 kHz的方波信号。该方波经RV2分压,LM386功率放大后驱动扬声器发声。
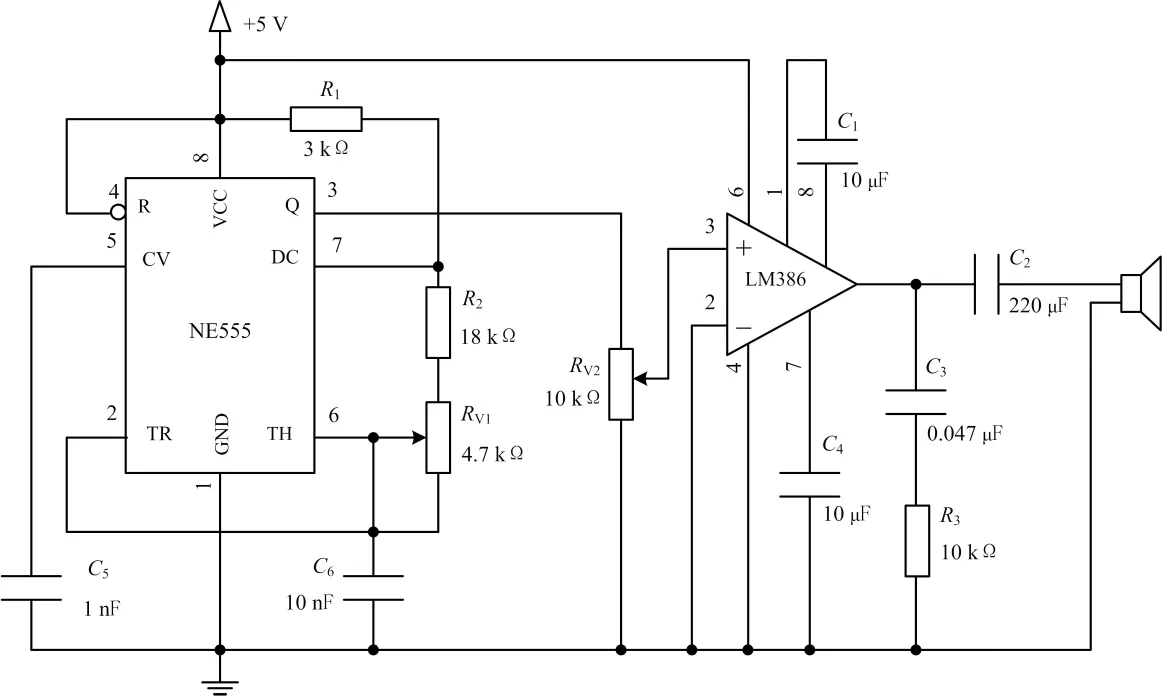
图3 发声装置电路
2.2 音频接收装置
接收装置采用MIC获取音频信号,经放大选频后作为单片机计时触发信号,如图4所示。
MIC接收到音频后输出幅值约5 mV的交流电压信号,该信号由C1滤除直流分量后送入三极管共射放大电路,放大为30 mV左右的交流信号,放大后的信号由LM567选频电路判断其频率。
LM567引脚5和引脚6上的外接电阻RV、R3和电容C4共同决定了LM567内部压控振荡器的中心频率f0。 f0的大小为

当输入LM567引脚3的信号幅值大于25 mV且频率在器件带宽[0.95f0,1.05f0]内时, LM567 引脚 8 的输出就由高电平变为低电平。该低电平被送至单片机外部中断引脚触发计时。图4中,C4取0.01 μF,R3为18 kΩ,RV为 4.7 kΩ精密电位器。 调节 RV使 f0≈4 kHz,即仅当LM567接收到声源信号时,才会发出负脉冲,触发单片机计时。
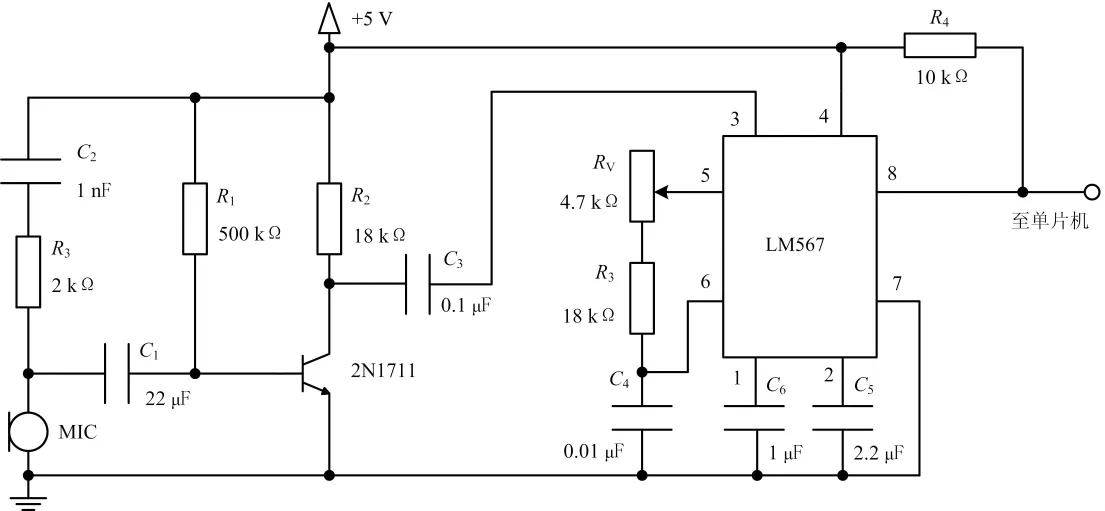
图4 音频接收装置电路
2.3 电机驱动装置
系统利用两个两相四线制步进电机分别跟踪声源仰角和方位角的变化,步进电机的驱动电路由L297和L298构成,如图5所示。在图5中,IO1~IO5分别接单片机的5个通用IO口。IO1和IO2输入的是L297的使能和复位信号,分别为高电平有效和低电平有效。IO3输入的是L297的工作方式选择信号:当此信号为低电平时,步进电机工作在全拍工作方式;当此信号为高电平时,步进电机工作在半拍方式。IO4输入的高低电平控制步进电机的正反转。IO5输入单片机发出的方波信号,方波的频率控制步进电机的转速。L297可自动生成步进电机的换相逻辑,其结果由A、B、C、D四个引脚输出,经L298进行功率放大后,驱动步进电机转动。
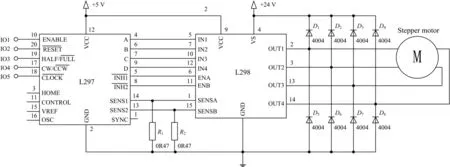
图5 电机驱动电路
3 实验与结果
实验装置原理如图6所示。在图6中,O、A、B、C四点安装相同的音频接收装置,A、B、C三点和O点之间的距离都为1 m;L是激光灯,电机M1调节L的仰角φ,电机M2调节L的方位角θ。手持发声装置S在黑板上移动,观察激光灯照射在黑板上的光点来判断声音定位的精度。
实验具体过程是:系统上电后S发声;O、A、B、C处四个音频接收装置分别接收到声音后,计算出A、B、C三点和O点接收到声音的时间差Δt1、Δt2和Δt3,再根据式(6)计算L的仰角φ和方位角θ,然后控制M1和M2跟踪上述两个角度,以使激光笔能照射到发声装置S附近。实验结果见表1。

图6 实验装置原理
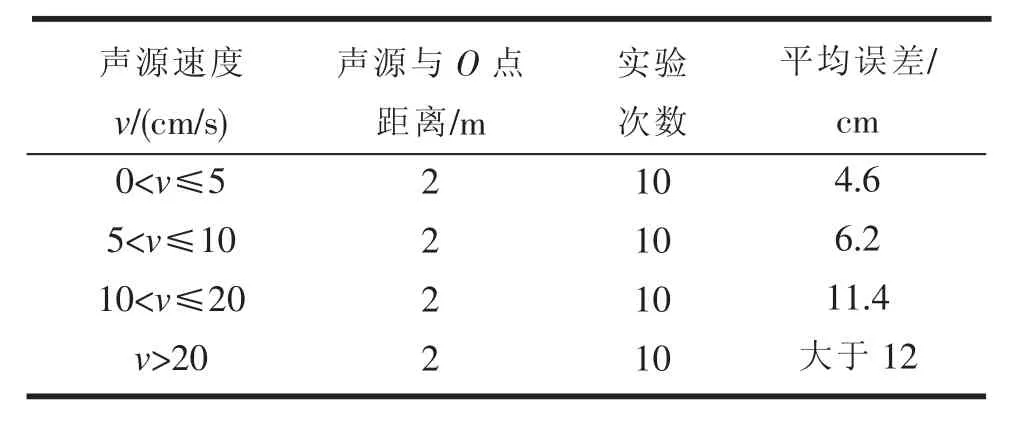
表1 实验结果
从实验结果来看,当声源移动速度较慢时,系统定位较精确,随着声源移动速度加快,系统的跟踪误差逐渐变大。这是因为系统本身有一定的滞后,声波信号传输、角度计算和电机的转速等都会影响调节时间,这个问题可通过更换速度更快的单片机以及优化控制程序等方法来解决。
4 结束语
我们设计的三维声源定位系统采用教学中常用的器件搭建,具有硬件结构简单、易于实现的特点,便于高校实验室自制。另外,该实验系统具有较好的知识综合性和二次开发的潜力,特别适用于电子、电气、自动化等专业的学生进行综合创新类的实验,对于改进高校实验教学模式、培养学生的自主创新能力具有重要作用和意义。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
科学与财富(2019年7期)2019-10-21
电子制作(2019年23期)2019-02-23
家庭影院技术(2018年11期)2019-01-21
汽车维修技师(2018年7期)2018-12-07
电子制作(2018年19期)2018-11-14
电子技术与软件工程(2017年10期)2017-06-02
电子制作(2017年9期)2017-04-17
电子技术与软件工程(2017年2期)2017-03-15
噪声与振动控制(2016年5期)2016-11-09