基于Hammerstein的压电作动器的建模与自适应逆控制
2018-07-18 05:30吕传龙简雨沛孙小通
现代计算机 2018年18期
吕传龙,简雨沛,孙小通
(西南交通大学电气工程学院,成都 611756)
0 引言
压电陶瓷作动器[1-3]是一种新型的智能材料作动器,其响应速度快,能量密度大,在精密仪器制造、航空航天领域有着广泛的应用前景。然而,其输入输出存在着复杂的率相关迟滞非线性特性,涉及光、热、电、力多场耦合,其建模与控制方法是当今控制研究的难点。
迟滞特性的建模方法已经有学者进行了大量研究,一般可以分为三种:基于材料物理原理的物理模型,基于现象的唯象模型和基于计算智能的智能模型。基于物理模型的建模方法,例如Jiles-Atherton模型[4]和StonerWohlfarth[5]模型,从物理机理出发给出具有明显意义的物理模型;基于现象的唯象模型,如Prei⁃sach[6]和Prandtl-Ishlinskii[7]模型无需考虑实际的物理意义,从实际输入输出考虑模型的建立;基于智能迟滞模型的建模方式,如神经网络模型和支持向量机模型,则是利用智能计算的方式进行输入输出描述。此外,如Modified Prandtl-Ishlinskii(MPI)[8]模型则是在传统算子模型基础上进行改机,增加了模型的适用范围。
经典的迟滞模型是频率无关的,不考虑系统的输入信号频率变化对输出的影响。然而,系统的输入信号频率变化对系统的输出影响是不可忽视的,研究频率相关特性需要不仅要研究经典的模型,更要研究在频率变化的耦合模型。率相关特性的建模理论可以分为整体与分离式两种不同的策略。整体式建模基于传统模型改进基础之上,增加频率耦合算子或算式[9],对模型建立要求更高,参数辨识愈加困难,基于此类的研究仍有大的提升空间。常见模块化的分离式结构包括Hammerstein 模型[10]、Wiener模型[11]和三明治模型[12]。
对微位移进行控制,迟滞系统常采用逆补偿方式,按照方式可以分为静态逆补偿和动态逆补偿两种方式。其中静态逆补偿可以分为直接逆补偿和与其他反馈方式结合的复合控制方法。
本文采用MPI模型和ARX模型组成分离式Ham⁃merstein模型,用以描述压电作动器的迟滞非线性和动态率相关特性。通过实验数据采集和分析,所提出的模型在1-100Hz内具有良好的频率泛化能力。采用基于Hammerstein逆模型的自适应控制算法进行实时跟踪控制,实验结果表明,控制结果稳定误差小,满足控制要求。
1 Hammerstein建模
Hammerstein模型利用模块分割的思想用于描述一大类非线性系统的问题。此种模型将非线性系统分为静态非线性模块与动态线性模块,通过两种模块的串联描述非线性问题,广泛应用于作动器系统、电力系统、生物与神经科学研究等[13]。图1为Hammerstein模型结构图。
本文选用改进的Prandtl-Ishlinskii(MPI)建立Hammerstein模型中的静态模型。动态模型采用ARX模型描述。由于压电陶瓷作动器在输入信号低于5Hz时,迟滞环形态基本不变,故认为此时的动态线性模块传递函数为1,以此建立非线性部分。动态线性模块建立在静态模型建立之后,通过输入复合多频率信号进行辨识。
1.1 MPI建模
PI模型表示的迟滞特性是一个奇对称的凸函数,在实际的作动器迟滞特性并不满足这一点,往往呈现出非奇非凸特性。PI模型的苛刻应用条件给模型理论研究带来新的研究方向。一种研究思路是在PI模型之前串联非奇非凸算子,如单边死区算子,使原模型具有非奇非凸等特性,构建MPI模型。
MPI(Modified Prandtl-Ishlinskii)模型为率无关的迟滞非线性建模的经典模型之一,其利用算子模型思想建立基本迟滞单元即Play算子构成内层算子和Deadzone算子构成外层算子,算子向量与阈值向量加权叠加表示系统的迟滞非线性特性。
图3为Deadzone死区算子输入输出关系图,ws为死区算子的权系数,rs∈R为死区算子阈值,上式中阈值向量为为死区算子向量,其表达式如下:
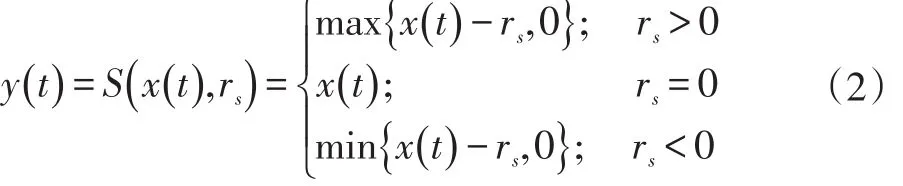
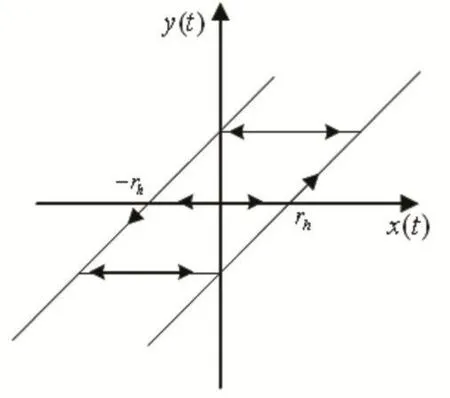
图2 Play算子输入输出关系
图3 Deadzone算子输入输出关系
因此,最终得到的MPI模型为Play算子与死区算子串联叠加,MPI模型表达式为:

1.2 ARX建模
ARX模型是一种有理传递函数模型,在Hammstein模型中表示动态线性部分,表示压电陶瓷的率相关特性,其表达式如下:

因此,Hammerstein模型的表达式如下所示:

2 模型辨识与验证
图4为西南交通大学电气工程学院智能材料与结构平台实验系统连接图,压电陶瓷作动器与实验器材连接图,实验部分包括作动器部分、传感器与放大器部分、处理器部分和上位机部分。
其中,压电作动器型号为哈尔滨芯明天有限公司生产的PSt/150/7/60VS12,电涡流传感器精度为8mv/μm,压电作动器采用伺服功率放大器进行驱动,dSPACE系统使用DS2002和DS2103板卡实现A/D和D/A转换。上位机采用dSPACE公司提供的Controldesk图形检测与控制软件。图5为实验设备连接图。
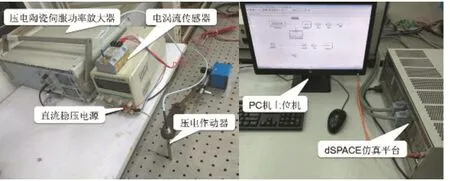
图4 实验设备图
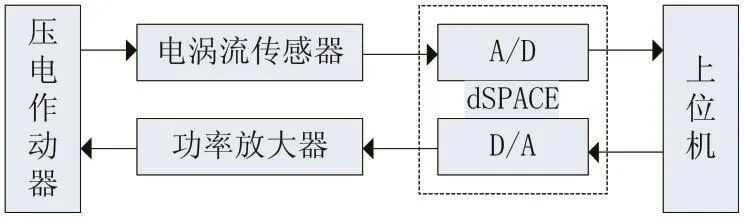
图5 实验设备连接图
2.1 模型辨识
系统模型辨识分为以下步骤:(1)将此正弦扫描信号数据加载到输入端作为输入数据x(t),记录此时的压电陶瓷作动器的输出数据y(t);(2)将此正弦扫描信号作为输入x(t)加载到MPI模块的输入端,记录此时Simulink中的模型输出数据作为输出数据u(t);(3)视MPI模型输出数据u(t)作为ARX模型的输入,视压电陶瓷作动器的输出作为ARX模型的输出,辨识工具采用MATLAB中的辨识工具箱ARX命令给出ARX有理参数模型参数。图6为Hammerstein模型辨识过程示意图。
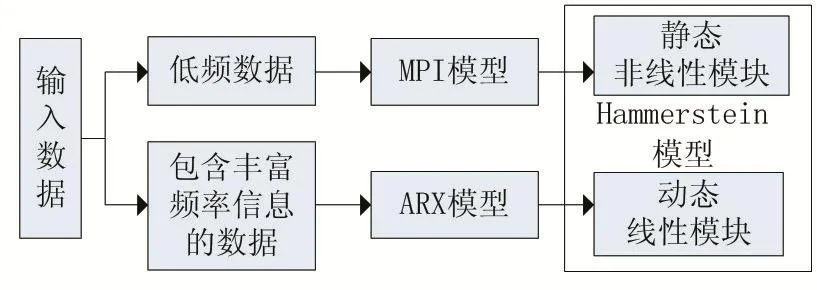
图6 Hammerstein模型辨识示意图
动态非线性模块辨识结果有理函数表达式如下所示:

2.2 建模验证
给定相同输入数据下,比较压电作动器实际输出与Hammerstein模型输出结果,验证模型的有效性。输入数据选择为单一频率正弦信号或多频率混合正弦信号,其输入幅值为35μm,频率范围为1-100Hz。为了量化分析不同频率下,检测所建模型与实际模型的相符程度,引入相对误差RE(Relative Error)和均方根误差RMSE(Root Mean Square Error)来描述近似程度。
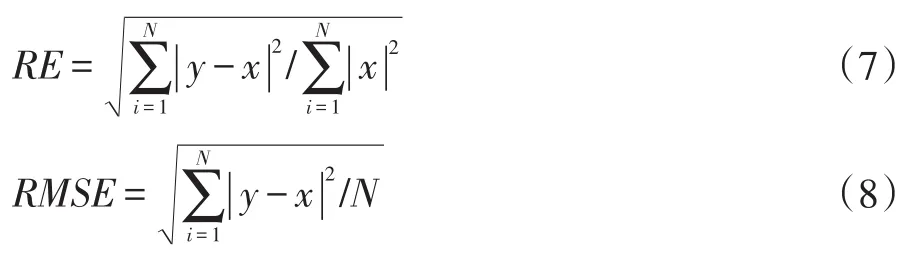
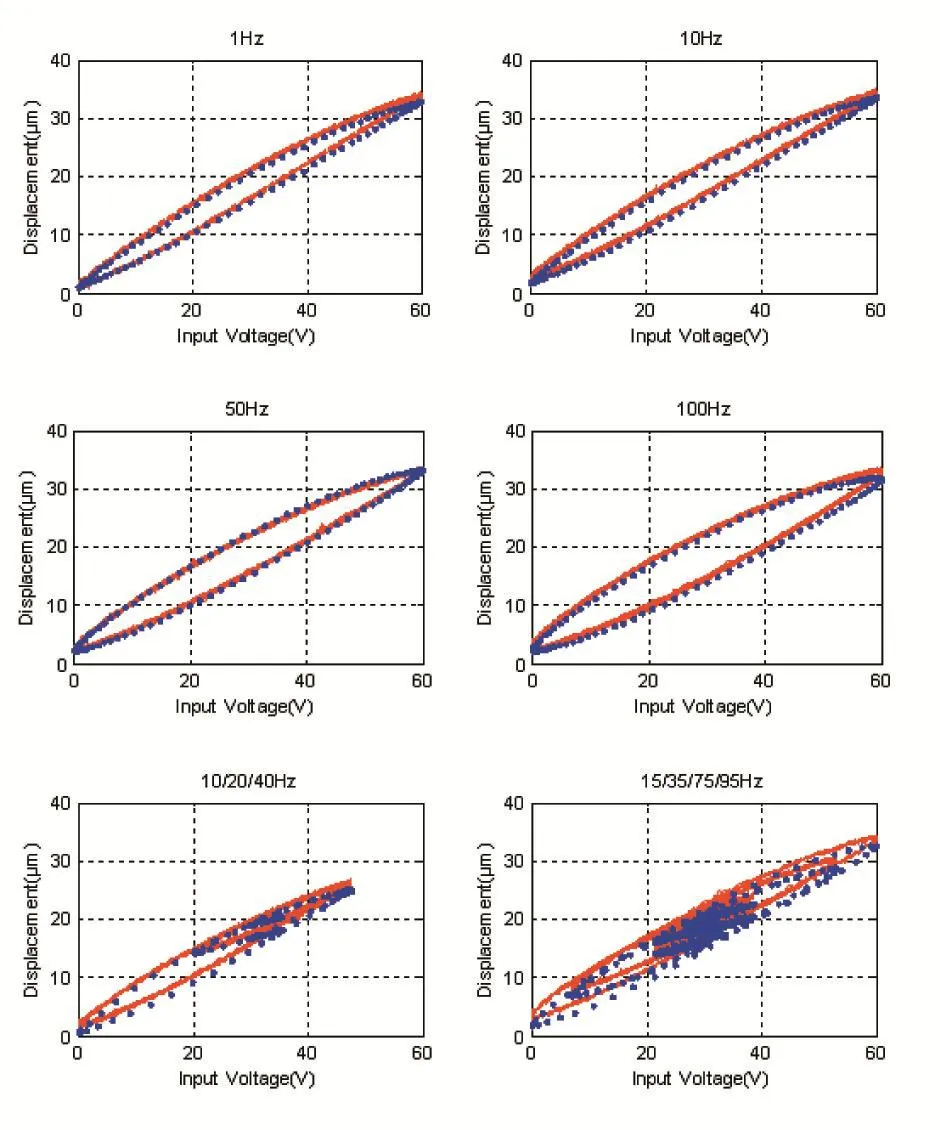
图7 建模效果图
(红色实线为实际输出,蓝色点线为模型输出)
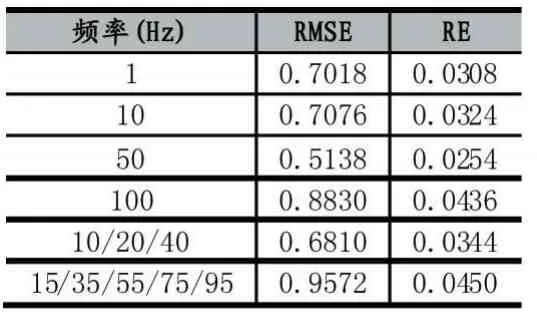
表1 模型误差验证
实验部分采用对照实验的方法,验证了1-100Hz下单一频率与复合频率下的模型输出与实际输出的关系相对误差均小于5%,验证了所提模型方法的有效性,对不同频率的输入具有一定的泛化能力。
3 控制器设计
Hammerstein逆模型包括MPI逆模型和ARX逆模型两部分。作动器跟踪控制的一般思路是的控制方式为建立Hammerstein逆模型方式对压电作动器迟滞逆补偿,从而减少迟滞带来的影响。但是由于建模存在误差,以及外界不可避免的干扰,使静态逆补偿方式,难以实现高精度的定位跟踪控制。因此,本文采用基于LMS自适应调节的方式动态调节Hammerstein逆模型的参数,使之逼近真实逆模型,跟踪控制信号。
3.1 MPI逆模型
MPI逆模型为Play算子和Deadzone死区算子分别作为外层算子和内层算子分别加权叠加。MPI逆模型表达式为:

根据文献[14]可计算逆模型参数Play算子系数,Play算子阈值系数,死区算子系数和死区算子阈值系数。
3.2 ARX逆模型

在本课题实验中,采样频率为10kHz,可以利用近似逆的方式代替原模型的逆模型。
3.3 LMS自适应算法
自适应逆控制的实现需要解决对控对象的逆模型建立和自适应算法的选择两个问题。对于逆模型建立,引入自适应线性组合器的方法,将模块化Hammer⁃stein模型表达为自适应滤波器结构;对于自适应算法部分,引入权值更新算法动态调节Hammerstein逆模型中的可调节参数,最终实现系统的控制要求。
自适应线性组合器结构如图8所示。

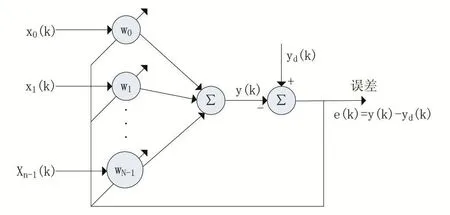
图8 自适应线性组合器图

其中,μ为权值更新的步长。文献[15]证明为矩阵R的迹,当步长μ满足0<μ<tr(R)-1时,权向量在平均意义上是收敛的。
对于图9自适应逆结构,自适应算法动态调节MPI逆模型的参数。Play算子的权值向量相对于死区算子权值向量对频率变化更为敏感[16],因此在自适应算法调节中,可以对Play算子的权值进行调节从而获得更为精确的逆模模型。
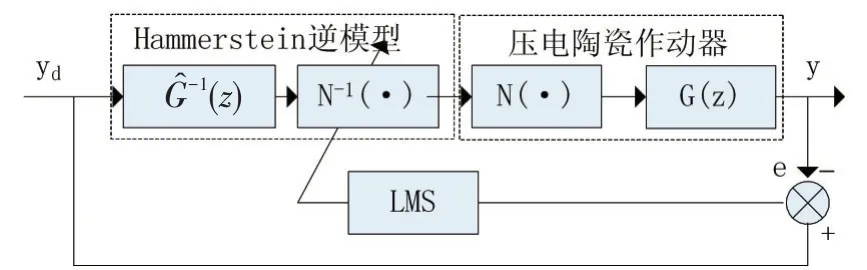
图9 自适应线性组合器图
将MPI逆模型中的阈值向量为Play算子的权值向量,这里可以看成线性组合器的权值向量,将其余部分表达式看为自适应线性组合器部分。因此,公式(10)可以改写为:

以离线构建的Hammerstein逆模型作为初始控制器,自适应逆控制过程利用LMS算法不断调节向量,从而使逆模型不断逼近真实逆模型,使主通道传递函数接近1,从而抵消迟滞特性对系统的影响,实现自适应控制效果。
4 压电作动器的跟踪控制
通过比较作动器输入和输出关系,验证控制算法实时跟踪能力,设计了六组控制对比实验:单一频率正弦信号:10Hz、50Hz、100Hz;复合频率正弦信号:10/20/40Hz、30/60/90Hz和10/30/50/70/90Hz。输入信号幅值为40μm,采样频率为10kHz。实线表示理想输出信号,点线表示作动器实际输出,中间位置波动信号为误差信号。
4.1 跟踪控制结果
通过图10为压电作动器实时控制实验结果。
4.2 跟踪控制结果
为了进一步比较不同频率下,自适应逆控制效果,表2给出不同频率下自适应逆控制的统计数据,以RE和RMSE进行表示输入与输出的近似程度和离散程度。
从图10和表2可知,自适应控制实现了良好的跟踪控制效果,减弱了迟滞非线性对压电作动器的影响,提高了控制精度。因此,本文提出的基于Hammerstein模型的自适应控制方法有效。
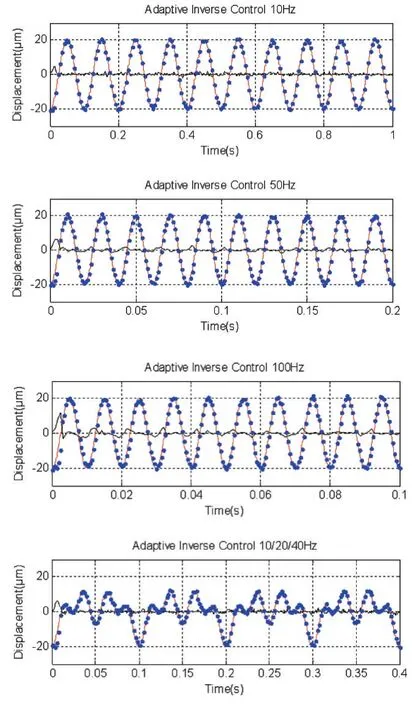
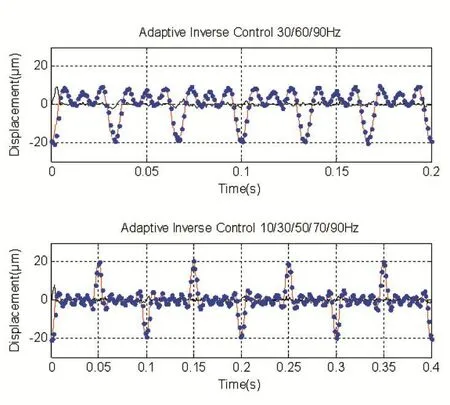
图10 作动器实时控制结果图
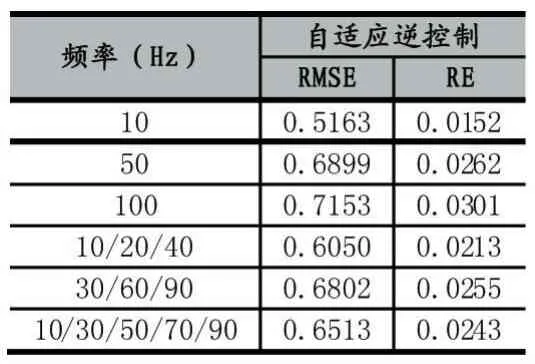
表2 压电作动器实时控制效果分析
5 结语
针对压电作动器率相关迟滞非线性特性,本文提出了基于Hammerstein模型的建模方法,利用MPI模型和ARX表征系统的静态非线性和动态线性环节。利用LMS自适应调节算法动态调节Hammerstein逆模型中的MPI模型参数,使之逼近真实逆模型,抵消迟滞对系统的影响,并通过实验验证算法的有效性。
对于控制算法而言,传统的PID控制效果难以满意[17];前馈+PID的控制方法的控制精度依赖于非常精确的建模精度,带有PID反馈控制器决定了系统鲁棒性差,难以自适应调节;而采用自适应逆控制方法可以在线调参,鲁棒性和适用性强,而且不依赖建模,可以在模型不精确情况下实现较好的控制效果。因此,本文所提出的算法有具有较好的适用范围和适用性。
猜你喜欢
东北大学学报(自然科学版)(2022年6期)2022-07-08
仪表技术与传感器(2022年4期)2022-05-31
云南大学学报(自然科学版)(2022年1期)2022-02-21
陶瓷学报(2021年4期)2021-10-14
北京航空航天大学学报(2021年7期)2021-08-13
汽车实用技术(2021年3期)2021-02-24
校园英语·上旬(2020年1期)2020-05-09
发电设备(2020年2期)2020-04-06
探测与控制学报(2018年4期)2018-09-11
卷宗(2017年16期)2017-08-30