
基于V2X技术的FCWS测试方法研究
2018-07-26 13:11张迪思祖晖陈新海王博思
汽车实用技术 2018年13期
张迪思,祖晖,陈新海,王博思
(重庆车辆检测研究院有限公司,四川 重庆 400000)
前言
当前,车辆的环境感知技术分为两个方向,一是通过自主感知,即自身的传感器探测周围环境类似于“人的眼睛”。二是通过专用短程通讯,也就是 V2X车路协同技术进行感知,通过“听”和“讲”的方式,发送和接收信息。两种方式各有优劣,自主式感知通过摄像头、微波雷达、激光雷达等传感器对可见范围内的物体有较强的识别能力,且不存在通信延时、丢包等问题,决策机构可迅速及时的获取数据;V2X方式则有较强的车路通讯能力,可通过路侧设备 RSU实时获取红绿灯相位、道路拥堵情况等信息;凭借其500米左右的信号覆盖范围,可提前获知非视距范围内的道路信息,为车辆的决策提供更丰富的环境数据,可充分弥补自主式感知的劣势。然而,由于当前V2X设备装机量的不足,以及道路设施尚未大量铺开,目前自动驾驶技术行业的主要关注点依然在自主感知技术的运用上,《营运客车安全技术条件JT/T 2016-1094》、《GB/T 26773 智能运输系统 车道偏离报警系统 性能要求与检测方法》、《JT/T 883 营运车辆行驶危险预警系统技术要求和试验方法》、欧盟《ECE R131》等国内外法规均对FCW、AEBS、LDWS等测试方法进行详细的描述[1],但其测试范围主要基于视距的基础上。本文将参考基于自主式感知技术的FCWS测试方法,实现基于V2X技术的FCW测试方法并对两种方式的测试结果进行对比。
1 基于自主传感器的FCWS实现方式
FCWS,即Forward Collision Warning System,前碰撞预警系统,该系统可以在碰撞发生前发出紧急的碰撞警告,帮助驾驶员提前做出制动措施,可以有效降低追尾事故发生概率或减轻碰撞激烈程度[2]。当前,FCWS主要通过摄像头和微波雷达作为感知层获知周边信息,然后数据会被提交给决策系统;决策系统将对数据进行一系列的处理,包括过滤无用信息、判断所处车道、判断障碍物的位置和姿态、判断障碍物的威胁等级,最后通过HMI声光报警或者触感的方式警告驾驶员。尤其在驾驶员过度疲劳、注意力不集中等情况下,FCWS可以极大的减少事故的发生几率。
2 基于自主传感的FCWS测试方法
目前FCWS主要采用预警事件TTC试验方法,即通过Time To Collision碰撞时间判断FCWS系统是否在合理的时间范围内给予了警告信息[2]。以《营运车辆行驶危险预警系统技术要求和试验方法》(JT/T 883-2014)为例,试验工况分为前车静止CCRs、前车运动CCRm、和前车刹车CCRb三种,如下表所示。
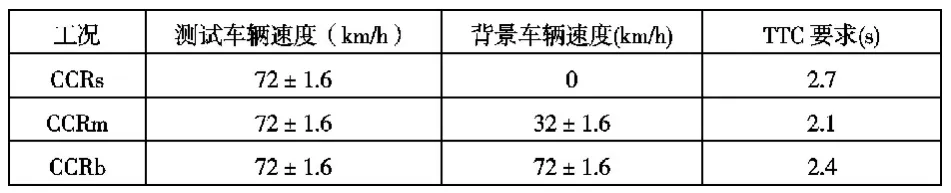
表1 三种试验工况

图1 JT/T 883-2014标准的FCWS典型测试场景
按照标准要求,每一个试验工况测试七次,满足TTC报警要求则视为一次成功,如七次测试中有五次成功且没有两次连续失败的情况出现,则视为通过该组工况测试。典型的测试场景如图1所示。

图2 一组产品的CCRm测试结果
根据资料显示,自主式FCWS系统,尤其是基于摄像头的产品,普遍存在TTC报警时间不稳定,标准差过大等问题。图2展示的是一组产品的CCRs测试结果,其中P1、P2、P3为国产基于摄像头的产品,P4和P5为基于毫米波雷达的产品。
3 基于V2X的FCWS所依赖的技术
3.1 V2X技术
V2X是一种实现车与车、车与路、车与人之间通讯的无线通信技术,最显著的特点是可以实现去中心化的 AdHoc自组网通信,且具有延时低、覆盖范围广等特点,非常适合运用在车路协同领域。目前V2X技术分为两个阵营,分别是美国主导的DSRC技术,以及中国大唐、华为主导的LTE-V技术。相对于自主式FCWS采用的摄像头和微波雷达,V2X方式在感知范围上具有较大的优势,且不受障碍物影响。

表2 几种技术的感知范围对比
3.2 高精定位技术
全球主流的卫星定位服务主要由美国GPS、俄罗斯的格洛纳斯、以及中国的北斗提供,通过实时差分技术RTK,其定位精度可以达到更高级别。高精定位又分为地基和星基,目前最常用的是星基,国内的厂商,如千寻,已经开始提供定位服务,其精度可以达到分米级。如果通过专用设备搭建RTK基站,则其精度可以高达厘米级。
V2X技术解决了信息传输的问题,而高精定位技术则解决了车辆位置的问题,车与车之间变可以通过相互告知自己的位置、速度、姿态等信息,计算出两车之间碰撞的可能性以及碰撞的风险等级。
4 使用V2X技术实现FCWS测试的方法
4.1 基于V2X的FCWS测试设备
4.1.1 V2X车路协同车载终端
V2X车载终端包含通信模块、控制器、HMI(用户界面,如平板等)和电池。其中,通信模块负责车与车之间的通信;控制器负责判断和处理数据;最后由HMI以声光的方式告知驾驶员。目前,国内研发V2X车载终端的厂商主要有星云互联、金溢、万集等,且联合编著的联盟标准《合作式ITS车用通信系统应用层及应用数据交互标准》已准备上升至国标,为各厂商之间实现互联互通提供了基础支撑。各厂商开发的应用已经覆盖前向碰撞预警、交叉路口预警、超速预警、红绿灯监测等多项应用,并且部分厂商还提供开放接口,供用户进行二次开发并允许对参数进行修正,为试验中更精确的调试匹配扫清了技术障碍。
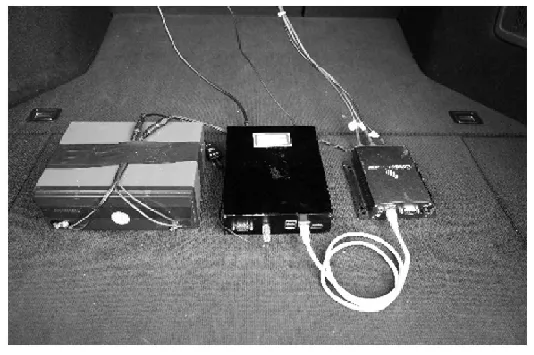
图3 某V2X车载终端
4.1.2 高精定位差分基站
常规的定位服务只能提供亚米级的定位精度,而 FCWS系统对定位的精度要求相对较高,需要车道级的定位,否则就会导致报警提前或延后,甚至将对面车道正常行驶的车辆误认为是本车道车辆,造成频繁的误报,影响用户体验。因此,需要在测试中架设差分基站,以获取车辆最准确的位置信息。测试中,架设的差分数据分发结构如图4所示:地面差分基站获取校正信息,将校正信息发送给中心服务器,然后服务器再将数据分发给路侧基站进行广播,或者直接通过蜂窝网络传递给车载终端[3]。
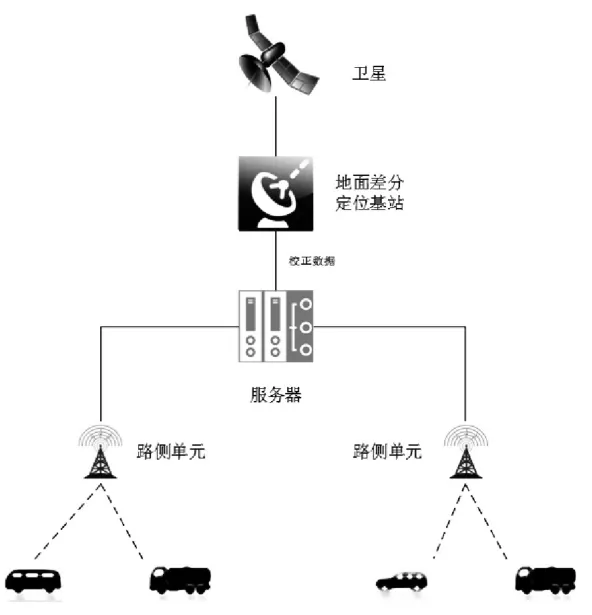
图4 典型的地基RTK基站数据分发结构
4.1.3 双车协调系统
双车协调系统用于获取两车的相对距离和相对速度,由此可以计算出试验所需要的重要指标TTC。常见的双车协调系统如OXts公司的RT-RANGE。

图5 OXts公司的RT-RANG
4.2 基于V2X的FCWS测试场景
4.2.1 测试前的准备
测试车辆和背景车辆均需要安装双车协调系统和 V2X车载终端,并将天线放置在车顶处,以保证通信质量。另外,测试场地须提供高精定位服务。

图6 V2X设备装车状态
4.3 基于V2X的FCWS测试流程和方法
4.3.1 直道测试
本测试由于有一定的危险程度,并且对通信的环境要求较高,应该选择有测试资质的试验场,并且最好在性能路等平直路段进行,为了保证试验的安全性和测试效果,测试路段的长度应大于2公里,并有缓冲区域。
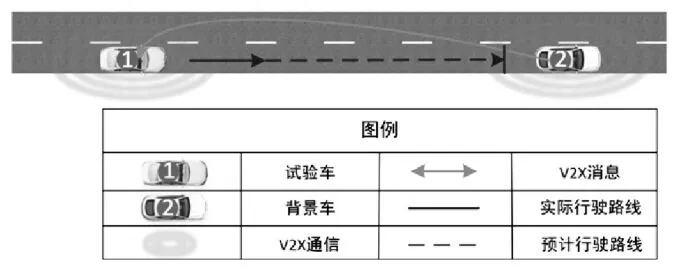
图7 双车同道测试
测试工况如下表所示:

表3 双车同道测试工况表
测试流程如下:
(1)确保试验车与背景车V2X系统通信正常;确保高精定位数据正常。
(2)试验车沿道路中心线以72km/h速度行驶,背景车按照各工况所需速度行驶;
(3)背景车执行工况所需操作。
(4)记录测试车 FCWS系统报警时间,并记录双车协调系统所显示的TTC;
(5)当TTC小于2s时,试验车采取制动或转向避免发生碰撞;
(6)试验结束。
4.3.2 弯道测试
如前文所述,V2X相当于动物的耳朵,其最大的优势就是可以提前监测到非视距的物体,在弯道、起伏路等路段相对于自主式感知系统在理论上具备一定的优势。
除测试场地与直道测试不同之外,测试工况与表3相同,测试流程也与直道测试相同,测试时两车的初始距离可以适当的增大,使背景车辆不在测试车辆的可视范围内,从而达到测试NLOS场景的目的。根据LTE-V频率验证项目的测试报告,两车在弯道中相距150米的情况下,丢包率依然能保持在10%以下且延时小于100ms,可以充分保障FCWS在弯道中的性能。
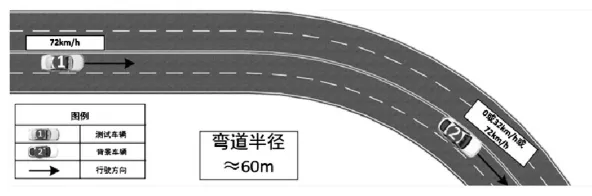
图8
4.3.3 虚警测试
虚警测试主要检测测试车辆的FCWS对目标物体的筛选过滤能力和误判率,是否能够过滤无威胁的物体(如对面正常行驶的车辆)。如果FCWS的误判率过高[4],频繁的对驾驶员发出错误的警告,不仅会造成驾驶员对报警的厌恶,还有可能使驾驶员对报警声产生倦怠,即使出现真正的险情,也无法做出及时的应对措施。如果这样的 FCWS后期演进到AEBS系统,直接对车辆的控制器执行错误的操作,后果就更不堪设想了。
虚警测试的测试示意图如下,测试车辆和背景车辆在不同车道中行驶,观察各种工况下测试车辆FCWS的响应情况。
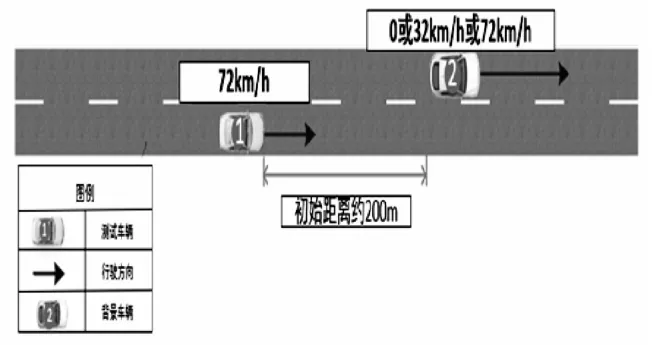
图9 虚警测试
其测试工况如表4所示:

表4 虚警测试工况
虚警测试的流程如下:
测试流程如下:
(1)确保试验车与背景车V2X系统通信正常;确保高精定位数据正常。
(2)试验车沿道路中心线以72km/h速度行驶,背景车按照各工况所需速度行驶;
(3)背景车执行工况所需操作。
(4)观测FCWS是否进行报警,如是,则测试失败。
(5) 试验结束。
5 测试结果
我们对基于V2X技术的FCWS产品进行了4种工况共计28组测试,并与其他两种产品的测试结果进行了对比,其结果表明,采用V2X方案的FCWS在性能和稳定性上已达到采用毫米波雷达方案的FCWS产品的水平,大大好于采用摄像头方案的产品。由于自主式FCWS产品没有进行弯道工况测试,因此没有数据可以进行对比。但是从技术实现的原理来看,V2X最大的优势应当就是此类非视距场景下的预警。
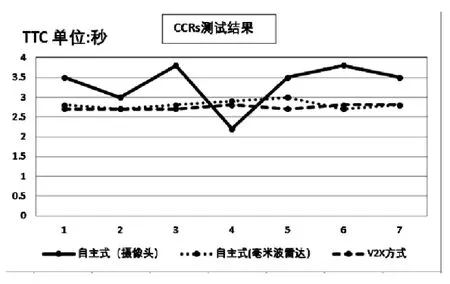
图10 CCRs测试结果对比

图11 CCRm测试结果对比

图12 CCRb测试结果对比
6 结语
(1)与自主式传感方式相比,V2X受天气等环境的影响较小[5],决定性能和稳定性的关键就是通信的覆盖率、延时、丢包率,以及相对位置和相对距离的算法。
(2)高精定位技术是V2X技术的左臂右膀,如果定位不够精确,无法反映车辆的实际位置,那么其性能肯定大打折扣。
(3)V2X需要足够的装配率才能有效果,但是V2X设备的普及还有很长的路要走,需要政府、企业、科研机构等各方的联合推动。
(4)自主式感知和V2X方式均拥有各自的优点和缺点,而两种传感器并不是竞争关系,融合是今后发展的大趋势。自主传感器感知到的信息可以通过V2X方式广播出去,将极大的扩大车辆的感知范围。
相对于自主式FCW系统,V2X系统对感知的要求更为准确,为决策系统提供的数据更为精确可靠,因此在性能、可靠性的表现上更为优越。尤其是车辆环境复杂道路上,自主感知系统受到障碍物遮挡时,V2X的优越性有更大的体现。
猜你喜欢
煤气与热力(2022年4期)2022-05-23
环球时报(2022-03-09)2022-03-09
防爆电机(2021年5期)2021-11-04
舰船科学技术(2021年12期)2021-03-29
导航定位与授时(2020年5期)2020-09-23
北京汽车(2020年1期)2020-05-07
中国外汇(2019年20期)2019-11-25
小太阳画报(2018年3期)2018-05-14
海峡姐妹(2018年2期)2018-04-12
人大建设(2018年12期)2018-03-21
