
面向对象分类技术在开发建设项目水土保持监测中的应用
2018-07-26 00:36周湘山戴松晨詹晓敏
水土保持通报 2018年3期
周湘山, 秦 甦, 魏 凡, 戴松晨, 张 磊, 周 杰, 詹晓敏
(中国电建集团成都勘测设计研究院有限公司, 四川 成都 611130)
“十三五”时期是水利现代化建设的关键时期,按照《全国水土保持信息化工作2017—2018年实施计划的通知》,应提高水土保持监测评价效力,促进信息共享与服务的同时,进一步提升水土保持信息化能力和水平。
水土保持监测是从保护水土资源和维护生态环境出发,运用多种手段和方法,对水土流失的成因、数量、程度、影响范围、危害及其防治成效等进行动态监测的过程,是防治水土流失的一项基础性工作。目前生产建设项目常规的监测方法包括调查监测、地面监测和资料收集、分析相结合的方法,虽然监测精度较高,但是自动化、信息化程度低,且费时费力、监测范围有限,无法得到实时化、定量化和数字化的监测成果,所以其应用受到一定程度的限制。
近年来,无人机系统的快速发展,使得无人机低空遥感较卫星遥感拥有更高的空间分辨率,更灵活的作业时间,更丰富的产品成果,更高效的数据处理流程,受大气影响较小,具有良好的应用前景。然而,目前无人机机载设备大多为数码或单反相机,均为可见光红绿蓝三波段的影像数据,与传统卫星遥感数据相比波段较少,无法单纯就光谱信息组合来实现对地物的高精度解译和分类。另一方面,基于倾斜摄影技术的大量应用,海量的无人机影像和三维模型数据,给自动分类带来了较大的需求。
现有的基于无人机可见光波段分类的应用基本还是在对植被类型的分类和提取上,主要有王枚梅等[1]基于无人机可见光影像的亚高山针叶林树冠参数信息自动提取,采用固定翼无人机获取可见光遥感影像,基于面向对象方法自动提取了亚高山针叶林的东西冠幅、南北冠幅、单元面积树木数和郁闭度等参数。汪小钦等[2]基于可见光波段无人机遥感的植被信息提取,通过构建可见光波段差异植被指数VDVI,适用于仅含可见光波段无人机遥感影像的健康绿色植被信息提取。井然等[3]基于可见光植被指数的面向对象湿地水生植被提取方法,利用ESP分割工具确定最佳分割尺度,基于微型无人机影像数据生成并选取一组最优植被指数,建立决策树规则,利用隶属度函数对研究区自动分类,生成水生植被分布图。
本研究将结合水土保持监测工作开展的地物分类需求,基于无人机低空遥感影像,在建立的最优分割尺度上,进行面向对象分类的计算和解译,实现对生产建设项目水土保持监测目标区域的自动化、三维化和定量化信息获取和数据分析,并利用位置信息的评价方法和误差矩阵进行精度评价,确保研究方法的适用性和正确性,从而为生产建设项目的水土保持信息化能力的提升提供一定的技术支撑。
1 数据来源与研究方法
1.1 研究区概况
以四川省阿坝州马尔康县境内的某水电站项目为例,对该工程批复的水土保持方案报告书中水土流失防治责任范围内的施工临时占地区进行分类研究,总面积为105.18 hm2。所属工程区河谷两岸山体雄厚,谷坡陡峻,山岭海拔高程一般达4 000~4 600 m,临河坡高1 000 m以上,属高山曲流深切割区。沿线地形陡峭,坡积阶地零星分布,冲沟发育,地震烈度为Ⅶ度。工程区属川西高原季风气候区,多年平均气温8.6~12.7 ℃,多年平均年降水量733.4~768.8 mm,多年平均蒸发量1 514.3~1 659.9 mm,区内灾害性气象主要有低温冷害、冰雹、大风、暴雨和洪灾等。工程涉及的河谷地区主要是冲积土和山地褐色土,多呈微碱性至中性,一般缺磷、多钾、多氮,养分不全面。区域适生防护林树种有岷江柏、油松、侧柏、云杉、山杏、花楸等,工程区域林草植被覆盖度达到80%以上。
1.2 数据来源及预处理
试验采用的遥感影像数据为四旋翼无人机航拍影像,成像时间为2016年6月23日,拍摄时天气状况良好,无风无云,机载相机1 200万像素,拍摄高度80 m,属于超低空拍摄,研究影像具有红、绿、蓝3个波段,空间分辨率为0.05 m。
由于影像的超高空间分辨率的特点,整个区域的影像数据量巨大,为了便于说明,本研究选取影像中包含地物类别丰富且较具代表性的一景影像(工程某一施工临时占地区)开展方法研究,影像中包含16 152像元×13 691像元,面积约59 929.09 m2。
利用倾斜摄影技术对目标区域影像进行几何校正,空三计算,区域整体平差,多视角影像密集匹配和纹理映射等处理流程,运算生成目标区域影像的超高密度点云,再生成TIN不规则三角网,最后生成基于真实影像纹理的高分辨率实景三维模型,输出数字表面模型DSM。
目前,国内暂无无人机低空遥感及倾斜摄影建模技术的相关规范和标准,本研究数据和成果要求均参照数字航空摄影测量的相关标准化指导性技术文件和水利水电工程测量规范。其中无人机低空遥感数据采集设计方案和影像数据质量均满足低空数字航空摄影规范(CH/Z 3005-2010)的要求;地面控制点和检验点设置均满足低空数字航空摄影测量外业规范(CH/Z 3004-2010)的要求;通过控制点匹配、校准后生成的数字表面模型中的地物点平面位置和高程位置精度均符合水利水电工程测量规范(SL197-2013)中地物点平面位置和等高线高程允许的中误差值,满足精度要求。
1.3 研究方法
基于无人机低空遥感高分辨率影像叠加高程数据,利用最优尺度分割,通过可见光波段差异植被指数参与分类和特征选取,建立相应特征的分类规则和参数指标,实现研究区域影像中地物的分类和信息的提取。根据研究区域影像的地物类型状况,研究对高分辨率影像进行深入分类,按照土地利用现状分类标准(GBT 21010-2007)将监测目标区域分为耕地、林地、工矿仓储用地(建筑物和设备设施)、交通运输用地(公路)、水域和裸地7类,再结合水土保持监测内容继续细分为弃渣料和水土保持工程防护措施(以下简称防护措施)2类。技术流程如图1所示。

图1 基于无人机低空遥感影像的面向对象分类技术工作路线
1.3.1 最优分割尺度 尺度对于无人机低空遥感影像包括了影像中地物的空间范围和影像的空间分辨率2层含义[4]。空间范围是指影像中地物的空间范围或区域大小;空间分辨率是指影像中能够分辨出的最小单元。从影像分割意义上说,尺度是指影像分割或区域合并时的阈值。使用单一尺度对无人机遥感影像进行分割,很难全面地反映不同大小和类型地物的目标特征和空间格局。因此,本研究使用多种尺度分割,从像素层、对象层到整个影像层形成符合地物内在性质和外在尺度的分割。
由于多尺度分割算法需要确定分割时影像的尺度参数、颜色因子和形状因子3类参数,其中形状因子又分为紧致度和平滑度2个因子,因此本研究借助Dragut等[5]建立的ESP(estimation of scale parameter)多尺度分割评价工具来计算不同地类的适宜分割参数,并结合目视判别分割效果来确定不同地类的最优分割尺度参数。
ESP多尺度分割评价工具通过计算不同分割尺度参数下,影像对象同质性局部变化(local variance,LV)的平均标准差的变化率值ROC-LV(rates of change of LV)来指示对象分割最佳尺度参数[6],当LV的变化率值最大即呈现峰值时,该点对应的分割尺度值即为最佳分割尺度。LV的变化率值的计算公式为:
(1)
式中:ROC——LV的变化率;Li——目标层第i层对象层的平均标准差;Li-1——目标层第i-1层中对象层的平均标准差。
1.3.2 分类参数设置 由于无人机机载设备为数码相机,影像波段仅包括红光、绿光和蓝光3个可见光波段,缺少近红外波段,无法建立基于近红外波段和红波段构建的归一化差分植被指数NDVI,对植被的识别不准确。因此针对的无人机影像中植被与非植被的光谱差异和健康绿色植被的光谱特征,借鉴综合了归一化植被指数NDVI 的构造原理及形式利用红、绿、蓝3个可见光波段构建的归一化植被指数——可见光波段差异植被指数VDVI[2]来对无人机影像中的植被进行识别。
可见光波段差异植被指数VDVI(visible-band difference vegetation index):
(2)
同时基于水土保持监测目标区域地物的实际特征差异,加入从DSM模型里面提取的高程数据进行分类,完善分类的参数指标,保证提取的水土保持监测地类的最佳分类精度。
2 分类结果与分析
2.1 多层次分割尺度获取
针对不同水土保持监测地物的分割尺度进行多次分割尝试并借助ESP分割尺度评价工具,获得不同层次地物的最优分割参数,详细分割参数结果见表1。最优分割尺度示意如图2所示。

表1 多尺度分割参数设置

图2 ESP第1层、第2层和第3层(从左到右)的最优分割尺度示意图
通过最优分割尺度的计算,由图2可以看出,对于光谱反射率较为一致,形状较为规则,纹理特征较为单一,海拔高度较为平缓的地物,分割尺度最大,主要包括建筑物、公路和水域3类。林地、设备设施和防护措施分布较为分散,高程跨度较大,影像斑块大小各异,分割尺度较前面3类地物较小。渣料、耕地和裸地3类地物影像分类斑块较为破碎,其中渣料的灰度值、纹理及形状特征最为复杂,同时3种地物类型与其他地类交叉覆盖较多,分割尺度均最小。
2.2 面向对象的信息提取
采用最邻近分类的监督分类方法,对分割后的影像进行分类,首先根据监测地物类型建立新的分类体系,并选择对应的样本。其次构建特征空间,依据9种地类不同的光谱特征、纹理结构、形状参数和高程来进行特征空间指标筛选。
房屋建筑物形状规则,海拔高度最高,同时各波段反射率也较高,在影像上一般表现为亮色调,建筑群体表面较为粗糙,各波段标准差比较大,分类时使用亮度值、各波段均值、各波段标准差、最大差分及长宽比进行分类。公路在影像上表现为长条带状,提取时可使用形状特征,包括边界指数、密度、长宽比等,同时结合使用亮度值、各波段均值和最大差分等进行分类。水域在影像上常表现为暗色调,同时海拔高度最低,采用亮度值、各波段均值、密度和最大差分进行分类。
林地同样表现为暗色调,采用可见光波段差异植被指数VDVI、亮度值、各波段均值和最大差分进行分类。设施设备高程较为一致,但类型和形状多样,地面反射率各异,影像上亮、暗色调均有,采用亮度值、各波段均值、各波段标准差、最大差分和密度进行分类。防护措施主要为混凝土防护和钢筋石笼,地面反射率较高,影像上多为亮色调,形状较为一致,采用亮度值、各波段均值、各波段标准差、最大差分、边界指数和密度进行分类。
渣料地由于没有地物覆盖,反射率较高,在影像上一般表现为亮色调,提取时使用亮度值、各波段均值、最大差分和密度进行分类。耕地和裸地两类均表现为暗色调,采用亮度值、各波段均值、最大差分和密度进行分类。具体指标选择见表2。
按照设置好的空间特征指标进行最邻近分类法进行监督分类,并统计分类后各监测地类斑块数量,具体情况见表3。

表2 项目施工临时占地区水土保持监测地物分类空间特征指标统计
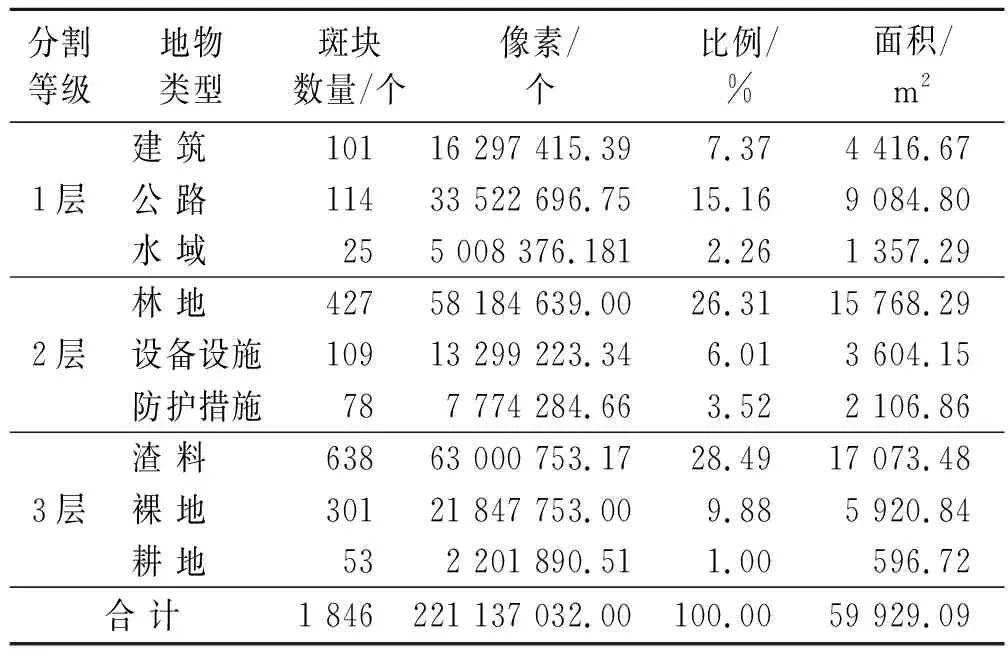
表3 项目施工临时占地区水土保持监测地物分类结果统计
根据分类结果可以看出,本研究区域地类中,渣料和林地面积最大,为17 073.48,15 768.29 m2,公路、裸地、建筑和设施设备地类面积居中分别为9 084.80,5 920.84,4 416.67,3 604.15 m2,耕地面积最小,为596.72 m2。分类斑块总数量以林地和渣料的最多,单位斑块内面积均值以公路、水域和建筑最大,林地、设施设备、防护措施和渣料其次,裸地和耕地地类最小,基本与分割尺度大小相一致。
2.3 精度验证
本研究采用基于位置信息的评价方法[7],在目标区域中随机进行检验点的选择和测量,对最优尺度的分类解译精度进行无偏最优估计。
(1) 检验点数量的确定。不适合的样本会造成对分类精度的评价误差,本研究根据Tortora提出的能够满足混淆矩阵精度评定的样本个数计算公式(公式3)[8],对检验点数量进行计算并现场测量随机选取。
(3)
式中:n——检验点数量;B——自由度为1的卡方检验(1-α/k)的临界值确定,其中α表示精度评估要求;k——分类个数;b——置信度误差。
本研究水土保持监测目标地物分类为9类,假设置信水平要求为95%以上,误差允许范围为5%,在没有先验知识的情况下,B=7.675,则n=B/(4b2)=768因此,本研究需要至少768个采样点才能保证。根据实际测量共计选择检验点位770个。
(2) 分类精度检验。通过现场测点并记录相应地物类型,结合分类结果,统计分类正确和错误的点位及个数,构建精度检验混淆矩阵,并根据公式(4)和(5)计算总分类精度及Kappa系数,结果见表4。
总分类精度:所有正确分类的土地类型的检验点数所占总抽取的检核点数的百分比。
(4)
式中:P——总分类精度;m——分类类别数;N——样本总数;Pn——第n类的判别样本数。
Kappa系数:考虑到自动分类和参数数据间的一致性、取样和参考分类的一致性的两种差异,表示分类结果比随机分类好多少的指标。介于0~1之间,值越大分类精度越高。
(5)
式中:K——Kappa系数;n——类别;N——类别个数的总和(此指检验点数);Xii——误差矩阵对角线元素;Xi+——类别的列总和;X+i——类别的行总和。
由表4计算出,本研究影像解译总体精度达到了86.10%,Kappa系数为0.841,有较好的一致性,能够满足精度需求。其中林地和水域解译分类精度最高,均在90%以上;公路和建筑的分类精度较高,位于87%~90%之间;耕地和渣料的分类精度适中,位于85%左右;裸地、设施设备和防护措施3种类型分类解译精度较低,主要是因为裸地与其它地类交叉覆盖较多,形状和分布高程各异,并有部分呈过度状态,导致光谱波段和纹理结构在分类与界定上存在一定的误差;设施设备中地表覆盖物较为复杂,反射率和色调各异,灰度值、纹理及形状特征与其他地类容易混淆;防护措施主要为混凝土防护和钢筋石笼,其中钢筋石笼的材质多以隧洞开挖渣料为主,与区域内的弃渣料一致,存在较大的分类影响,给解译分类带来了一定的难度,导致分类精度较低。

表4 项目区施工临时占地水土保持监测地类提取误差矩阵
因此,对于自动分类解译结果不能完全满足要求的地类需要重新进行样本点选择,调整特征空间指标再分类或直接针对分类结果与DOM影像对比进行人工局部调整和完善。
3 结 论
(1) 基于无人机低空遥感影像,通过倾斜摄影建模技术,生成监测目标区域的高精度数字表面模型,该模型影像分辨率高,能达到0.05 m,同时具有准确的数字高程模型数据,为面向对象分类提供了基础数据。
(2) 由于无人机低空遥感影像光谱波段较少,无法构建NDVI植被指数,因此借鉴可见光波段差异植被指数VDVI来对无人机低空遥感影像中的植被进行识别。研究成果中林地分类的生产者精度和用户精度分别为0.933 9,0.941 7,能较好地区分植被与非植被。
(3) 利用ESP多尺度分割评价工具对影像自动生成139,249,549这3种分割尺度,能对研究区域的水土保持监测地物类型进行很好的尺度划分。同时针对不同分类地物的类型和特点,对分类的参数和指标进行了筛选,为后续水土保持工作中的大面积监测区域不同地物类型的进一步分类应用,积累一定的经验基础。
(4) 经过精度验证,本研究的解译总体精度达到86.10%,Kappa系数为0.841,有较好的一致性,能够满足精度需求。
此外,针对目前的分类技术还可以进一步的提高。
(1) 继续完善无人机机载多光谱和高光谱设备,丰富光谱带,参与分类的光谱波段越多,不同地物的光谱差异性越大,对目标的识别和分类更准确。
(2) 针对可见光波段差异植被指数VDVI可以依据不同的地区的植被类型进行参数的修正和改进,同时也可以比较并选择其他对植被识别较好的归一化绿红差值指数NGRDI、归一化绿蓝差值指数NGBDI、过绿指数EXG和红绿比值指数RGRI等。
(3) 对地物的分类参数进行研究,制定出不同对象合适的特征指标类型及其数量,需要注意的是并非参与分类的特征指标越多,分类的精度就越高,因为分类特征越多也可能带来特征冗余的现象,会造成计算量的增加,分类效率的降低,甚至是分类精度的降低。
猜你喜欢
中国水土保持(2022年7期)2022-07-14
水土保持通报(2021年1期)2021-04-16
河南水利年鉴(2020年0期)2020-06-09
农业机械学报(2019年6期)2019-06-27
水土保持研究(2018年5期)2018-10-12
中国农业信息(2018年2期)2018-07-28
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
河南水利年鉴(2017年0期)2017-05-19
高师理科学刊(2016年8期)2016-06-15
