基于模糊PID控制的直流电动机控制策略
2018-08-08 08:19王曦
中国设备工程 2018年15期
王曦
(中国汽车工程研究院股份有限公司,重庆 401122)
工业生产中的直流电动机多采用内环为电流环,外环为转速环双闭环调速系统结构,来保证最大允许的恒定电流,达到在最大加速度的情境下调速系统趋于稳定。此时,电流转矩同负载转矩平衡。而电动机的转速恒定则由外转速环的反馈来保证。目前直流电动机都采用PI控制或者PID控制,PI控制由于控制器本身的缺陷,存在超调和快速性无法协调的问题。PID控制器中,参数Kp为比例系数,影响系统响应速度和调节精度;Ki为积分系数,影响系统的稳态误差,但Ki参数的调节不当可导致超调加大,进而引发振荡。Kd为微分系数,影响系统的动态特性,增大微分时间有利于加快系统响应,使系统超调量减小,稳定性增加,但对扰动敏感。传统PID控制器鉴于其可靠性高,控制算法容易实现,调节参数少,结合工程实践经验具有广泛的应用范围。但随着工业化的精细度增加,智能化和控制精度的要求不断提高,PID控制器已不能满足工业化发展的需要。模糊控制由于其不需要对控制系统精确建模的特性而广泛应用于复杂的控制系统,且其理论发展较为完善。模糊PID控制器由传统PID控制器和模糊控制器结合而来,误差e和e的微分为模糊控制器的输入端,ΔKp、ΔKi和ΔKd为输出端。模糊PID控制器的控制参数整定是寻找ΔKp、ΔKi、ΔKd和误差e及误差微分之间的模糊关系,结合模糊控制原理不断在线修改三个控制参数,以求控制系统具有较好的控制品质。模糊PID控制器结构框图如图1。

图1 模糊PID控制原理框图
1 直流电动机的数学模型
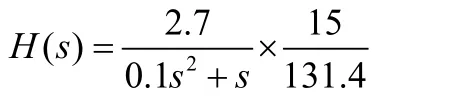
文中所选直流电动机的铭牌参数包括:空载转速:4100r/min;减速比:1/160;额定电压:56V。电枢电感和黏性阻尼系数忽略不计,考虑电枢电压ua(t)为输入变量,转速ω(t)为输出变量,结合自动控制理论可求出直流伺服电动机的传递函数:

基于Matlab/simulink建模,选取双输入三输出的模糊控制器,两个输入分别是位移误差e和e的微分。输出为ΔKp、ΔKi、ΔKd。
选阶跃信号为控制器的输入信号,因此模糊量化因子Ke=1,Kec=1,输入为电枢电压,其额定电压为56V,因此输出的比例因子Ku=56,仿真建模如图2所示。
2 模糊PID控制器控制参数的选取原则
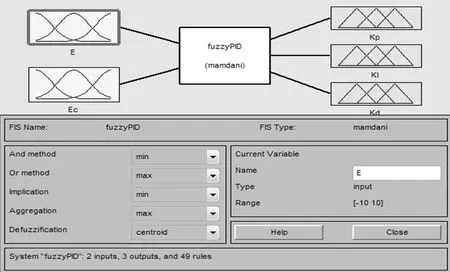
图2 模糊PID控制器的仿真建模框图
3 仿真验证
(1)一个外扰情况下的仿真比较。控制器的三个控制参数取值如下:Kp=3.1,Ki=4.6,Kd=2.8。仿真对比传统PID与模糊PID的阶跃响应曲线,仿真时间为10s,在第1秒时加入阶跃干扰,仿真模型如图3所示。
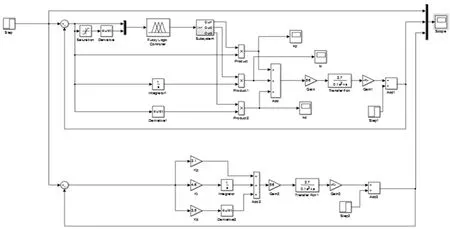
图3 模糊PID控制直流电动机的仿真模型图
仿真结果如图4所示,黄色曲线为阶跃信号,粉色曲线为模糊PID输出响应,蓝色曲线是PID输出响应,分析仿真结果可知,模糊PID同传统PID相比较,具有响应速度快、超调小的优点,稳定时间短,抗扰能力强。
通过示波器观察模糊PID控制器中的控制参数Kp,Ki,Kd的变化曲线,图5中红色是Kp,绿色是Ki,蓝色是Kd。仿真结果表明,在未加入阶跃响应时,为0,Kp减小,Ki增大,当1秒后加入阶跃响应时,Kp逐渐增大,Ki减小。系统在保证响应速度快的同时,具有较小的超调量,稳定后,为0,此时Kp和Ki均达到了最值,又开始逐步变大,Kp又开始减小,Ki增大。结合仿真结果可知e的微分值在开始时最大,然后逐渐减小。

图4 模糊PID控制直流电动机的仿真结果图

图5 模糊PID控制器参数仿真结果
(2)内扰和外扰并存的仿真验证。考虑内扰和外扰均会出现的情况,仿真时间取18秒,分别在第5秒和第15秒时更换控制系统的传函,可视为内部干扰,第10秒时加入的阶跃干扰,可视为外部干扰。仿真过程如下:

仿真结果如图6所示,内扰和外扰并存的情况下,模糊PID控制器较传统PID控制器而言,仍然具有响应速度快,稳定性好等良好的控制品质,但相较单一扰动,超调均进一步加大。
4 结语

图6 模糊PID控制器加入扰动时仿真结果
文章从PID控制器的本质出发,分析出快速性和超调之间的矛盾,结合控制理论发展较好的模糊控制,设计出适合直流电动机模糊PID控制器。选取应用较为广泛的直流电动机参数,并结合模糊控制器控制参数选取原则,考虑工程经验,基于Matlab/simulink仿真平台,建模仿真,考虑单一外扰,外扰和内扰并存时两种情况,通过大量仿真结果发现,模糊PID控制器具有响应速度快,超调较小的优势。考虑工业自动化中的控制情况,PID控制器控制参数调节对工程人员的素质要求较高,参数较难正定,若在加入模糊逻辑控制,则可得到较为理想的PID参数,非专业人士也可整定参数,提高工业自动化的效率。 模糊PID控制也有其自身的缺陷,比如模糊规则需要有经验的专家设定,并且模糊逻辑语言变量设置必须适当,否则易造成参数过大导致系统失稳。
猜你喜欢
电子设计工程(2022年15期)2022-08-17
化工自动化及仪表(2021年6期)2021-11-26
科技创新与应用(2019年17期)2019-06-09
天津教育·下(2018年9期)2018-07-13
自动化仪表(2017年8期)2017-08-30
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
城市建设理论研究(2014年11期)2014-04-21
科技致富向导(2013年21期)2013-12-10