新型乘波体设计及其研究现状
2018-08-10 01:56刘济民杨长胜
海军航空大学学报 2018年3期
刘济民,沈 伋,常 斌,杨长胜
(海军研究院,上海200436)
乘波体因其在高超声速条件下具有较高的升阻比,而且有利于机体与推进系统的一体化设计,因而成为高超声速巡航导弹、高超声速飞机和空天飞机等高超声速飞行器的首选构型[1]。美国率先将乘波体应用于高超声速试验飞行器的气动外形设计中并取得了成功[2-5],图1所示即为3种乘波构型高超声速试验飞行器。
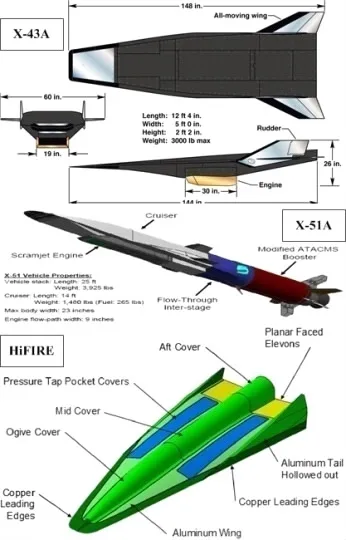
图1 乘波构型高超声速试验飞行器Fig.1 Experimental hypersonic vehicle with waverider configuration
由图1可知:乘波体用于X-43A和X-51A两种高超声速试验飞行器的前体,HiFIRE高超声速试验飞行器虽然整体采用了乘波气动布局,但对乘波体的修型较大。因此,上述高超声速试验飞行器都还没有充分发挥乘波体的高升阻比气动优势。
大量研究表明乘波构型在设计状态下具有比常规构型更大的升阻比,但非设计状态下(包括飞行速度、高度以及攻角等)的气动性能不如人意[6-9]。另外,对于吸气式高超声速乘波飞行器来说,还要求乘波前体能对来流进行有效压缩以提高整个推进系统的性能。上述问题严重制约了乘波体在高超声速飞行器气动外形设计中的应用。
针对上述问题,近年来国内外研究者借鉴常规飞行器的一些设计思想,设计出了多级压缩乘波体和两(多)级乘波体,并用于宽速域乘波飞行器的气动外形设计中。另外,把新兴的智能变形技术与乘波体设计方法进行有机结合,提出了可变形乘波体概念。研究结果表明:上述方法大大改善了乘波体在非设计状态下的性能,提高了乘波体的实用性。
为了与经典的锥导乘波体和密切锥乘波体等单一构型乘波体进行区别,本文将这些复杂构型乘波体和可变形乘波体统称为新型乘波体,并对其研究成果和最新研究进展进行分析总结,以期对新型乘波体的进一步研究以及宽速域高超声速乘波飞行器的气动外形设计有所帮助。
1 多级压缩乘波体设计
对来流进行有效压缩能有效提高吸气式高超声速飞行器的总体性能。为了充分发挥乘波前体的预压缩功能,吕侦军等[10-11]发展了一种多级压缩乘波体设计方法,可用于锥导和吻切锥乘波体的设计,生成的三级压缩锥导乘波体和吻切锥乘波体如图2所示。通过该方法设计得到的多级压缩乘波体可对来流进行多次激波压缩,能有效解决传统单级乘波体压缩量不足的问题。
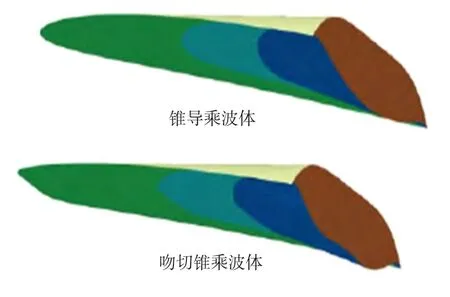
图2 三级压缩锥导乘波体和吻切锥乘波体Fig.2 Three stage compression cone-derived waveriderand osculating cone waverider
数值模拟结果表明:通过多级压缩可充分发挥乘波前体的预压缩作用,为推进系统的正常工作提供均匀流场。流量系数σ(σ=ρu/ρ0u0)代表了气流到达进气道进口处的质量通量的相对变化率,是前体预压缩性能的一个重要评价参数。三级压缩锥导和吻切锥乘波体的流量系数分别为3.183和3.084[10],而单级乘波体的流量系数仅为1.41[11]。可见,多级压缩乘波体对来流的预压缩性能明显优于单级压缩乘波体。
通过数值模拟与高超声速风洞实验的对比校验,结果表明在流场波系结构方面吻合较好,验证了该设计方法的可靠性[12]。为使多级压缩乘波体更接近工程应用实际,还应广泛开展以多级压缩乘波体为前体的高超声速飞行器机体/推进系统一体化设计与性能分析,来进一步验证多级压缩乘波体的有效性。
2 两(多)级乘波体设计
两(多)级乘波体设计是改善高超声速乘波飞行器在非设计状态下气动性能的一种有效途径。即把在不同马赫数条件下设计出的乘波体通过并联或者串联的形式组合起来,使组合乘波体在宽马赫数范围内均具有较高的升阻比,满足大部分任务剖面内对高升阻比气动性能的需求。
丁峰等[13-14]提出了高超声速滑翔-巡航两级乘波体设计思想。即在滑翔和巡航阶段使用不同的乘波体,滑翔段乘波体通过整流罩来实现,抛掉整流罩后就是巡航段乘波体。通过该设计思想设计出的两级乘波体如图3所示。它是一种通过改变乘波面来实现在两个不同的飞行马赫数下均具有乘波特性的创新设计方法。数值计算结果表明:巡航级乘波体在-2°≤α≤10°、4≤Ma≤10内,无黏最大升阻比大于6;滑翔级乘波体在 -2°≤α≤10°、6≤Ma≤12范围内,无黏最大升阻比大于2.7。该两级乘波体在滑翔和巡航段内都具有较好的气动性能,可以应用到滑翔-巡航类高超声速飞行器气动外形设计中。
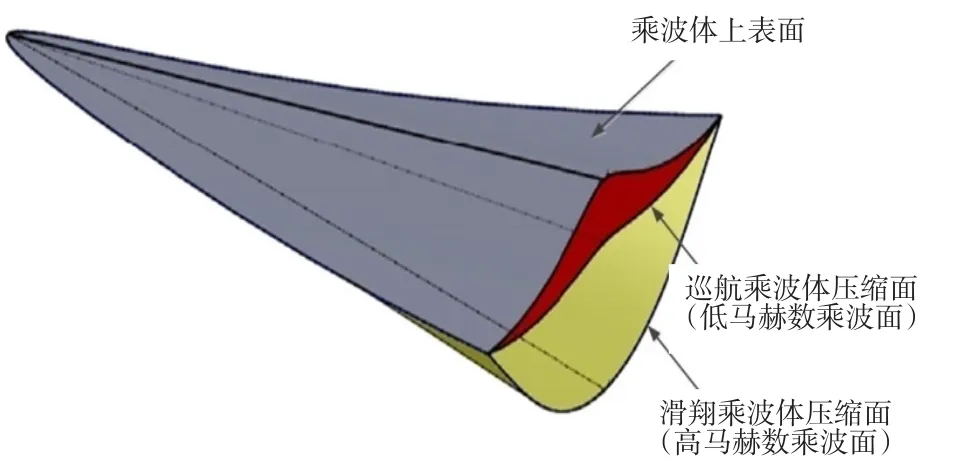
图3 锥导滑翔-巡航两级乘波体Fig.3 Cone-derived gliding-cruising dual waverider
刘珍等[15]在两级乘波体设计的基础上,提出了满足更宽马赫数范围的多级乘波体设计方法。该乘波体的自由流上表面保持不变,通过改变压缩面来满足不同来流马赫数要求,如图4所示。一级压缩面对应相对较大的来流马赫数(Ma=12),四级压缩面对应相对小一点的来流马赫数(Ma=6)。计算结果表明:在0°≤α≤4°、6≤Ma≤12内,多级乘波体的最大升阻比均大于3.7。可见,多级乘波体设计方法可以部分解决非设计马赫数状态下乘波体气动性能恶化问题。
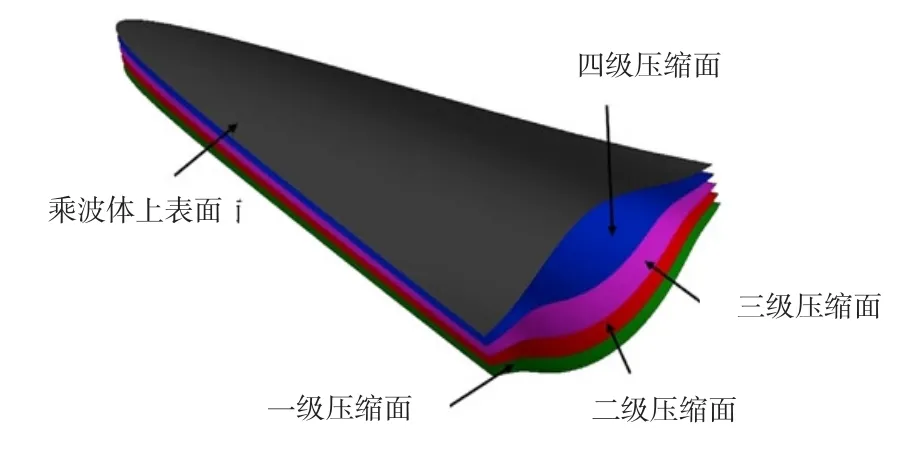
图4 多级乘波体示意图Fig.4 Multistage morphing waverider
上述两(多)级乘波体都是基于锥导理论设计的,乘波体下表面凸起,存在无法为超燃冲压发动机提供均匀压缩气流的缺陷。王庆文等[16]为解决这一问题,提出了基于吻切锥理论的两级乘波体设计方法,设计出的吻切锥滑翔-巡航两级乘波体如图5 a)所示。
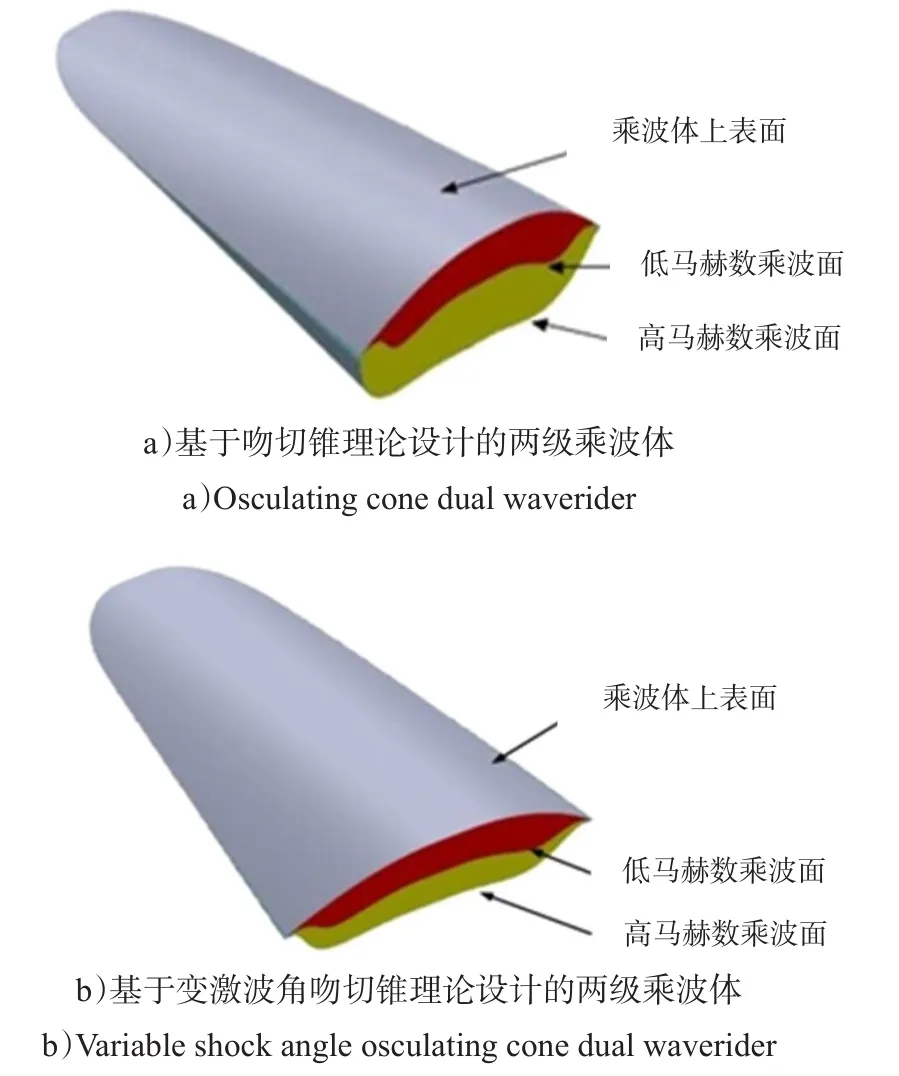
图 5吻切锥滑翔-巡航两级乘波体Fig.5 Osculating cone gliding-cruising dual waverider
计算结果表明:巡航级乘波体在-2°≤α≤10°、4≤Ma≤8范围内,无黏最大升阻比大于4.5;滑翔级乘波体在-2°≤α≤10°、10≤ Ma≤ 14范围内,无黏最大升阻比均大于3.2。滑翔级和巡航级乘波体在较宽的速度域和攻角域内均具有良好的气动性能。
通过采用数值计算方法分别对巡航级(低马赫数乘波面)和滑翔级(高马赫数乘波面)进行设计方法验证,发现滑翔-巡航两级乘波体的理论设计激波位置和数值模拟的激波位置基本吻合,但滑翔级乘波体存在“溢流”现象,导致滑翔级乘波体气动性能降低。
“溢流”现象的产生源于滑翔级乘波体采用与巡航级乘波体相同的激波角进行设计。虽然乘波构型升阻比随激波角的变化不大,但马赫数变化较大时,采用定激波角生成的乘波体必然存在“溢流”现象。因此,王庆文等又提出了变激波角吻切锥理论,设计出的滑翔-巡航两级乘波体如图5 b)所示。通过对设计方法进行验证可知,基于变激波角吻切锥理论能够设计出严格“乘波”的两级乘波体,解决了基于定激波角吻切锥理论设计的两级乘波体中滑翔级存在的“溢流”问题。计算结果表明:该方法提高了滑翔级乘波体的气动性能,在 -2°≤α≤10°、10≤Ma≤14范围内,无黏最大升阻比大于4.1,与前者相比提高了28%。显然,基于变激波角吻切锥理论的设计方法更为合理。
由图3、4与图5对比分析可知,基于锥导理论设计的两(多)级乘波体(图3、4)头部是尖的,而且乘波体下表面凸起,导致下表面流场不均匀,显然不利于机体与推进系统进行一体化设计。而基于吻切锥理论设计的两级乘波体(图5)头部是平的,而且下表面扁平,有利于对来流进行均匀压缩,为超燃冲压发动机提供均匀压缩气流。因此,在是否有利于机体与推进系统的一体化设计方面,基于吻切锥理论生成的两级乘波体明显优于前者。
上述两(多)级乘波体都是针对几个离散的马赫数来设计乘波体下表面,在不同来流马赫数下通过使用相应的压缩面来实现“乘波”特性。该设计方法显然能够提高乘波体在对应马赫数条件下的气动性能,但也仅是一种折中方案,在不同马赫数之间飞行时“乘波”特性不能保证。因此,该方案还不能完全满足水平起降可重复使用的高超声速飞行器气动外形设计需求。
3 可变形乘波体设计
可重复使用高超声速飞行器在执行任务过程中,其飞行高度(0~40km)和速度(Ma=0~6)变化范围大,固定外形的飞行器很难始终保持高升阻比气动性能。智能变形技术使得飞行器气动外形可以根据不同飞行环境和状态发生改变,满足多任务、大包线飞行的要求[17-18]。因此,将智能变形技术引入到高超声速乘波飞行器设计中来,有望解决广域宽速范围内气动性能匹配问题[19-20]。
Maxwell[21-22]等对可变形乘波再入飞行器进行了研究。保持上表面和前缘曲线不变,通过下表面的变形来适应不同飞行速度下的“乘波”需求,如图6所示。
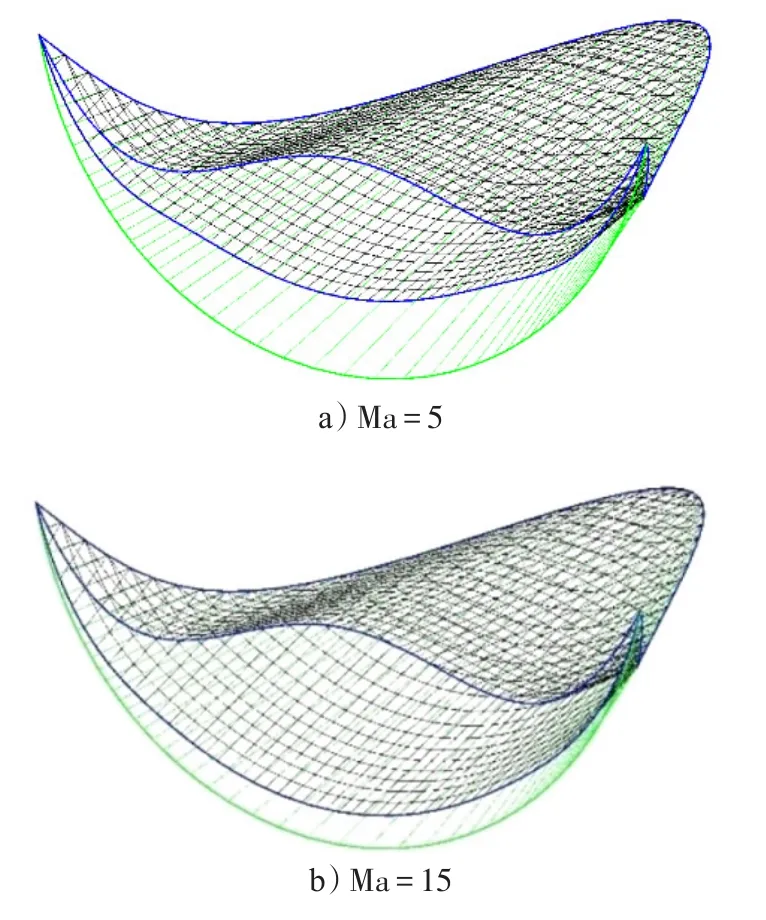
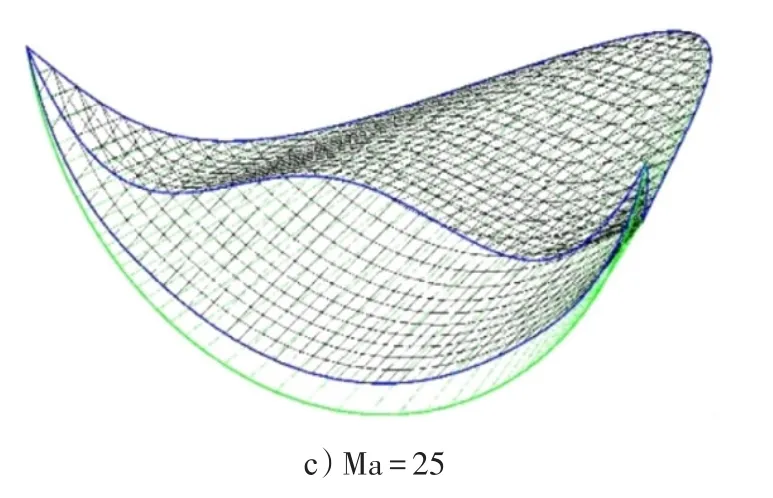
图6 可变形锥导乘波体Fig.6 Morphing cone-derived waverider
通过改变结构外形,可使乘波再入飞行器在再入过程中始终保持良好的气动性能。通过再入轨道特性分析可知,与传统的航天飞机轨道舱相比,较高的升阻比使乘波再入飞行器在再入过程中的减速度峰值降低了将近50%,热流峰值降低了60%,从而显著提高了再入弹道特性。
Maxwell等[23-24]还对变形执行结构的位置选择进行了研究,对满足表面精确形变所需最少执行机构的数量进行了优化。研究结果证实了合理的控制系统能够控制乘波体表面进行合理形变,使乘波体在宽马赫数条件下始终保持优良的气动性能成为可能。上述研究主要集中于锥导乘波体,可推广应用于其他类型的乘波体。
刘燕斌[25]和邓俊等[26-27]针对高超声速乘波飞行器强耦合、非线性和大包线飞行等特点,将智能变形技术引入到乘波体设计中来,根据不同飞行状态调整乘波体外形,即通过改变压缩面角度的大小来实现飞行性能的最优化,如图7所示。
由仿真分析可知:与基准构型相比,乘波体变形后,进气道入口处的气流压强、密度和温度都增大了,马赫数降低了,表明变形后的构型具有更好的气流压缩能力,这更有利于超燃冲压发动机的工作。
邓俊等的研究不仅考虑了乘波前体变形对气动性能的影响,还分析了前体变形对发动机热壅塞和饱和的影响。分析可得,基准构型更有利于避免发动机发生热壅塞和饱和现象。可见,乘波前体变形后虽然提高了压缩性能,但同时却容易发生热壅塞和饱和现象。因此,变形也需综合平衡考虑,在不同的飞行环境和状态下,通过合理改变乘波体的压缩面角度大小来调节进入发动机的气流特性,使得推进系统获得最优性能。该研究的不足之处是建立的模型是二维的,过于简单,三维模型能否取得一致的结论还有待于进一步验证。
图7 变形前后的乘波体外形Fig.7 Waverider wireframe before and after deformation
将智能变形技术引入到高超声速乘波飞行器设计中来,对可变形乘波体进行分析研究,能为今后可变形乘波体结构控制、发动机控制与飞行控制的一体化设计提供可借鉴的研究方法。可变形乘波体的研究目前尚处于概念研究阶段,后续的研究工作极富挑战性。变形动态过程中的不确定性也是非常重要的因素,需要在今后的深入研究中给予考虑。
4 宽速域乘波飞行器气动外形设计
对于高超声速飞行器,如何设计出满足从起飞到高超声速巡航等整个飞行包络的高升阻比气动布局成为了一个挑战。王发民等[28]开展了宽速域乘波飞行器气动布局研究。飞行器的前半段采用以巡航条件设计的高超声速乘波体,后半段采用满足起飞加速需求的低速乘波体,中间用一个适配器衔接,设计出的宽速域乘波飞行器如图8所示。风洞实验与数值模拟结果表明:在全速域范围内(0.3≤Ma≤7),最大升阻比都大于3.5,说明该乘波飞行器在亚跨声速、超声速和高超声速范围内具有良好的气动性能。
图8 宽速域乘波飞行器Fig.8 Wide-speed range waverider configuration
李世斌等[29-30]提出了基于串/并联融合理念的宽速域飞行器乘波气动外形设计方法。借鉴串/并联设计思想,将高、低两种设计马赫数下的乘波体进行有机融合,获得具有高升阻比特性、适应宽速域飞行条件的新型乘波气动布局,如图9所示。采用理论分析和数值模拟方法考察了宽速域乘波飞行器的气动性能,并比较全面地对比研究了“串联”与“并联”两种宽速域飞行器气动外形设计方案的特点。
图9 宽速域飞行器乘波构型Fig.9 Wide-speed range waverider configuration vehicle
研究发现:当攻角α=3°,在4≤Ma≤12范围内,“并联”方案的最大升阻比为3.5,而“串联”方案的最大升阻比为3.47;当6≤Ma≤12时,“并联”方案气动性能略优于“串联”方案,且随着马赫数的增加,升阻比的差值增加,最大差距为0.058。但“串联”方案静稳定性好,且更易参数化选取,模型生成容易,可控性强,便于进行优化设计。
王庆文等[16]在基于变激波角吻切锥理论设计的两级乘波体基础上,进一步开展了滑翔-巡航两级乘波飞行器气动布局的设计。采用基于变激波角吻切锥理论设计的两级乘波体作为飞行器前体来设计两级乘波飞行器,对乘波前体上下表面后缘线进行水平拉伸设计机身,左右两侧配上乘波机翼,机身下表面进行压缩面处理,配上斜置尾翼,设计的两级乘波飞行器如图10所示。气动特性分析结果表明:设计的两级乘波飞行器在正攻角(0°≤α≤10°)滑翔飞行时(6≤Ma≤14),升阻比均大于3,两级乘波飞行器的气动性能良好。
图10 两级乘波飞行器气动布局Fig.10 Dual waverider configuration of hypersonic vehicle
本节研究是新型乘波体设计方法在宽速域高超声速飞行器气动外形设计中的具体应用。以乘波体为气动布局主体,结合常规飞行器成熟的设计方法,设计出的宽速域乘波飞行器气动布局更适应飞行环境变化,气动性能基本满足多任务、大包线飞行的需求。
5 结束语
理论和试验研究结果均表明乘波体在设计状态下具有非常优良的气动性能,但非设计状态下性能退化严重,影响了乘波体在高超声速飞行器气动外形设计中的应用。多级压缩乘波体、双(多)级乘波体、可变形乘波体等新型乘波体的研究极大地丰富了乘波体的设计方法,在压缩性、非设计点性能等方面提高了乘波体的实用性。宽速域乘波飞行器气动布局设计使乘波体向实用化方向迈进了一大步,为乘波构型高超声速飞行器的设计奠定了基础。通过对新型乘波体设计及其研究现状的分析,可以得到以下几点结论。
1)多级压缩乘波体可以充分发挥前体的预压缩性能,同时,在非设计状态下依然有良好的气动性能和压缩性能。该方法可用于吸气式高超声速乘波飞行器的气动外形设计中,但其有效性还需进一步验证,下一步应大力开展该类乘波飞行器的机体/推进系统一体化设计和性能分析。
2)两(多)级乘波体的设计思想、基本原理以及气动布局设计均极具创新意义,同时也极具挑战性。两(多)级乘波体仅是对离散的几个来流马赫数进行设计,其适用的速度域范围有限,可用于滑翔-巡航类高超声速飞行器的气动外形设计中。下一步应深入开展该类高超声速乘波飞行器的全弹道特性研究。
3)乘波技术与智能变形技术相结合是未来高超声速飞行器气动外形设计的一个重要方向。乘波体性能与飞行条件(速度、高度和攻角)之间的对应关系、乘波体的变形规律,以及控制系统和执行结构的设计是下一步研究的重点和难点。
4)宽速域乘波飞行器气动布局设计是新型乘波体具体应用的初步尝试。作为高超声速巡航飞行器来说,虽然大部分任务时间是在设计状态下飞行,但从起飞到设计状态以及任务完成后从设计状态返回到地面都处于非设计状态下。而且,在这个过程中,速度域、高度域和攻角域变化范围很大。因此,宽速域乘波飞行器气动布局设计依然任重道远。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
军民两用技术与产品(2021年7期)2021-10-13
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2020年3期)2021-01-14
航空兵器(2020年2期)2020-07-30
数字海洋与水下攻防(2019年4期)2019-12-02
山东工业技术(2019年15期)2019-05-31
航空兵器(2018年4期)2018-11-26
太空探索(2016年7期)2016-07-10