
MIMO雷达协方差矩阵重构波束形成算法
2018-08-17 09:46谭志浩贾维敏周淑华
电光与控制 2018年8期
谭志浩, 金 伟, 贾维敏, 周淑华
(1.火箭军工程大学,西安 710025; 2.火箭军青州士官学校,山东 青州 262500)
0 引言
与传统相控阵雷达相比,集中式MIMO(Multiple Input Multiple Output)雷达拥有更高的目标分辨能力和更好的参数辨识能力[1-2]。波束形成目的是将目标成分进行加权增益,同时抑制干扰降低噪声,获得高输出SINR性能。近年来,大量的稳健自适应波束形成算法被提出,主要可以分为两大类:一类致力于获得精确的联合导向矢量[3-8];另一类力图获取更为准确的协方差矩阵[9-14]。前者在联合导向矢量失配较小时,可以获得很好的性能,但在大失配误差情形下鲁棒性变差;而后者实质上是基于最小方差无失真响应(MVDR)波束形成器原理,对各类任意失配误差,特别是大失配误差情形,均具有较强的鲁棒性,因而成为该领域的研究热点之一。文献[9]提出的基于Capon空间谱估计法对协方差矩阵重构(Reconstruction Based,RB)算法,对失配误差具有较强的鲁棒性,但是在选取干扰角域时显得过于“宽松”。文献[10]从缩窄干扰角域和环不确定集约束误差(Narrowing the Interference Angular Domain and Annular Uncertainty Set,NIAD-AUS)两个方面对RB算法进行了改进。虽然NIAD-AUS算法对任意失配误差均具有很强的鲁棒性,但是其计算复杂度过高,不适合大规模MIMO雷达系统。
因此,本文提出BI-KMC(Bilateral K-means)算法,从两方面修正失配误差模型:一方面基于双边约束的方式,在发射端和接收端分别建立导向矢量误差集,然后获取离散的联合导向矢量失配误差集;另一方面基于小不确定集模型结构特点,提出用K-means聚类算法获取少量加权特征采样点来代替原先大量的离散采样点,在保证算法高输出SINR性能的同时,尽可能降低计算复杂度。
1 基本概念
假定空间中存在包含目标在内的k个信号,则接收端信号可以表示为

(1)
式中:θi为第i个信号的方向角;at(θi)和ar(θi)分别为发射导向矢量和接收导向矢量。对式(1)进行分析不难发现,接收信号包含信号、干扰和噪声3方面成分,则式(1)可以重写为
(2)
式中,ai为第i个信号的联合导向矢量。因此,协方差矩阵可以表示为
(3)
同样,协方差矩阵也可以对应地分成3方面成分,即

(4)
(5)
基于空间谱估计方法,文献[10]提出的NIAD-AUS算法采用不确定环集来约束失配误差。由于构造干噪协方差矩阵,因此干扰方向的信息显得尤为重要,为了保证算法性能,需要对干扰的联合方向矢量进行误差建模约束。与之前单一目标约束稍有不同,这里的干扰方向是一个角域,所以直接采用大不确定集对干扰方向失配误差进行约束的效果并不理想。因此,NIAD-AUS算法提出将干扰角域进行离散化处理,对于每一采样角方向上,采用相同半径的小不确定集作为大不确定环集的估计来进行约束。实际上,这种约束方式通过离散化处理,使干扰角域的各类误差被包含在多个小不确定集组成的不确定环集中,即小不确定集代替大不确定集来约束失配误差,则干噪协方差矩阵可表示为
(6)
(7)
式中,∂Sa为小不确定集的表面。然而,即使是面积分,计算复杂度仍然较高。为降低小不确定集带来的计算复杂度,NIAD-AUS算法对小不确定集也采取离散化处理,即在小不确定集表面选取大量采样点作为不确定集的估计,则干扰协方差矩阵可以通过下式求解获得
(8)
式中:I为干扰角域的离散角个数;L为单个方向角对应不确定集表面的采样点数。NIAD-AUS算法基于阵元数M,给出了不确定集表面选点个数L的选取方式。假定选点因子n0=2,3,…,则选点个数可以取为
(9)
2 BI-KMC算法
NIAD-AUS算法的计算复杂度为O(LIM2),由式(9)可以发现,其计算复杂度会随着阵元数增加呈指数增长,不适用于虚拟阵元数较高的MIMO雷达系统。因而,从算法计算复杂度来源出发,基于此,提出修正失配误差模型来提升算法性能。
2.1 计算复杂度分析
不难发现,NIAD-AUS算法对不确定集表面采样选点数的约束显得太过“宽松”。实际中的任意误差模型可以用一个等效联合失配误差表征,即存在幅度和相位两方面的影响。为了能有效地约束任意失配误差,在不确定集表面的选点可以进行均匀选取,则该离散失配误差集可以表示为

(10)

为直观地说明这个问题,用图1进行阐述。图1所示为不确定集的三维空间图,即阵元数为3的情形。在该情形下,不确定集的几何特征为球集,而NIAD-AUS算法提出的选点个数为8,这8个点是立方体的顶点。不难发现,选用离散点集的方式实际上是用与球集同心的立方体来表征的。事实上,在三维空间中,一个球面只需要4个非共面的点就可以准确描述。所以,从这一点上而言,NIAD-AUS算法描述球面选择8个点有些“冗余”,且选点的均匀性要求显得约束过紧。

图1 失配误差模型修正示意图Fig.1 The schematic diagram of modified mismatch model
这种因为选点数的增加造成的“信息冗余”在算法性能上不会带来不良影响,但会造成算法计算复杂度的浪费。还是以图1进行阐释,球面的描述可以有多种方式,8个均匀点、4个均匀点、4个非均匀点都可以描述。采样点数限制的是计算复杂度,而采样点的位置选取则显示算法的灵活性。为了有效地降低算法的计算复杂度,在选取采样点时,应当尽量选取最少的特征采样点来对球面的结构进行表征。
2.2 失配误差模型
事实上,RB算法和NIAD-AUS算法的不确定集选取方式,可以从失配误差模型角度进行分析。不确定集的提出,实际上就是对约束范围容错机制的建立。RB算法对干扰角域的离散化,使干扰方向可以在干扰角域内均具有较强的鲁棒性。从误差失配模型来看,RB算法的误差失配模型在角度维上,由最初的单点约束转化为曲线约束。NIAD-AUS算法则在此基础上对失配误差进一步修正,将曲线约束离散点转化为高维矢量约束,相当于将失配误差模型由二维向高维拓展。但这种失配误差模型不断修正的过程,也是计算复杂度不断增加的过程。在实时性要求较高的情形中,需要对失配误差模型进行再修正,即在算法性能与计算复杂度之间寻找到一种折中。NIAD-AUS算法对单点不确定集表面采取有限均匀采样点的方法,实际上就是对失配误差模型的一种修正,即采用低计算量的估计值来描述不确定集的本质特征。
本文则充分发掘MIMO雷达双边优势,对失配误差分别进行约束,这其实是将联合失配误差模型分解为两个单边失配误差模型,即发射失配误差模型和接收失配误差模型,实现对误差失配更精确的建模。这种失配误差模型的修正是由MIMO雷达系统的结构特点决定的。联合导向矢量一般是Kronecker积的形式,无论是发射还是接收导向矢量,两者的小失配误差就可能造成大失配误差的情形,而修正后的双边失配误差建模的方式可以有效提升该情形下的鲁棒性。
除此之外,选用少量特征采样点来描述单点不确定集表面,也是对失配误差模型的一种修正。此时,与PC算法[9]相似,本文不再致力于将所有失配误差情形完全包含在内,而是允许少数的误差矢量被“遗漏”的情形,当然这种“遗漏”只是极少数的情形。选用尽可能少的特征点来表征高维不确定球面,可能会出现对不确定集的描述不能完全表征的情形,但这是由于离散采样点集作为球面估计所带来的问题,在NIAD-AUS算法中亦存在。因此,这种失配误差模型修正是在部分性能损失下的对NIAD-AUS失配误差模型的一种改进。值得注意的是,这种性能损失几乎是可以忽略不计的。
2.3 BI-KMC算法
结合MIMO雷达系统结构特点,上一节提出了采用双边约束的方式对失配误差进行约束。由于发射端和接收端可以认为是等效的,因此,本节以接收端为对象,对误差模型进行研究。此时,就单边而言,优化模型可以退化为普通的阵列信号处理过程。显然,小不确定集点数直接决定算法的计算复杂度。
但是,在降低小不确定集点数时需要注意两方面的问题:一是点数应当尽可能的少;二是点数必须具有代表性,可以有效描述不确定球集的特征。事实上,这两方面也就是算法的两个方面,前者是力图算法收敛更快,后者是力图获得较高的鲁棒性。不难发现,修正后的小不确定集表面实际上就是一个高维凸球集,因此本文考虑选择更少、更有效的加权采样点来表征其结构。
在数据挖掘中,聚类算法被认为是无监督学习中最重要的算法,而聚类就是致力于在一堆无标记数据中,发掘出一个结构来进行表征,这一点正是在选取加权特征采样点时所需要的。因此,可以利用聚类算法获取加权特征采样点,从而较好地解决性能与复杂度之间的矛盾。
KMC(K-means Clustering)算法是最经典的聚类算法之一。本文采用KMC算法就在于其相对简单和高效。KMC算法目标函数在于使数据群内平方和最小化,这种平方和实际上就是欧氏距离,即
(11)
式中:k为聚类中心个数;el为第l个采样点;ci为第i个聚类中心。利用式(11)可以对NIAD-AUS算法的2M个点进行加权,获得k个特征采样点,从而有效地减少干扰协方差矩阵重构的采样点数,使重构过程的计算复杂度大大降低。实际上,由于采用KMC算法,可以发掘出初始采样点的结构特点,在鲁棒性方面所提算法和NIAD-AUS算法是相当的。
分析算法复杂度,所提算法复杂度除NIAD-AUS算法的两方面来源外[10],KMC聚类过程也是重要来源。若KMC算法迭代次数为t,则其复杂度为O(tkLM)。对阵元数较大情形,KMC算法是所提算法复杂度的决定因素。不难发现,由于失配误差模型结构相对简单,只需要1次迭代就可以选取出合适的加权特征点,算法计算复杂度较低。

从信息发掘方面来分析,传统的采样协方差类矩阵,只是利用数据的相关性进行的求解过程,这种方式没有更充分地利用先验知识,如干扰的大致方向等,因而在算法性能提升方面有所限制。而干扰协方差矩阵重构类算法则充分利用先验知识,对数据内的信息进一步发掘,因而算法的鲁棒性更强。
3 仿真结果与分析

图2给出了不同SNR条件下各算法的性能对比,从中可以看出,RB算法在高SNR条件下可以获得很强的鲁棒性,但是在低SNR时,干扰角域过多的无效角导致算法性能的损失,而其他算法则在高SNR时鲁棒性较差。本文提出的BI-KMC算法在SNR为-30~10 dB时,可以始终获得最优的输出SINR性能。图3所示为当SNR为-5 dB时,不同快拍数下各算法的性能对比,从中可以看出,当快拍数为150时,所提算法就能获得最优输出性能,且输出SINR始终最高。而LSMI算法基本失效,RCB算法、WC算法和BI-QCQP算法则在快拍数从100到500过程中,输出SINR存在不同程度的提升。换言之,所提算法对快拍数依赖度较小。

图2 不同SNR下的SINR性能比较Fig.2 The output SINRs versus the input SNRs
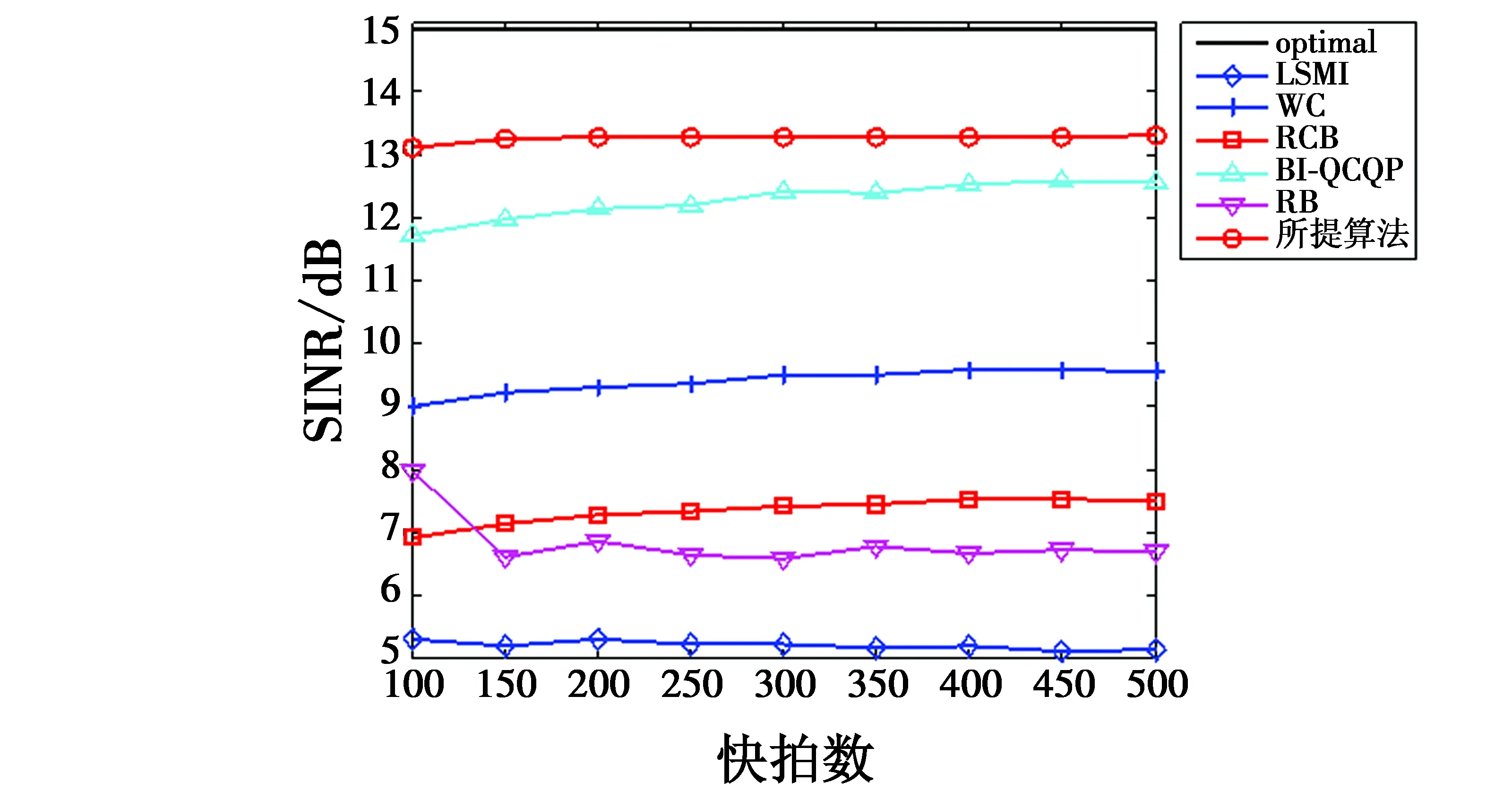
图3 不同快拍数下的性能比较Fig.3 The output SINRs versus the number of snapshots
图4所示为仅存在方向角度估计误差条件下各算法的性能对比,从中可以看出,各算法对方向角估计误差均具有一定的鲁棒性,而BI-KMC算法的鲁棒性最强,在失配误差为4°以内时,始终能获得最优输出SINR。其他算法性能则随着方向角失配误差的增大有不同程度的下降,其中,WC算法和RCB算法下降速度较快。
为了进一步研究算法对各类失配误差的鲁棒性,在仿真过程中,假定联合导向矢量的每个元素被均值为0、方差为0.04的复高斯分布成分“污染”,在此基础上对方向角估计误差进行研究。
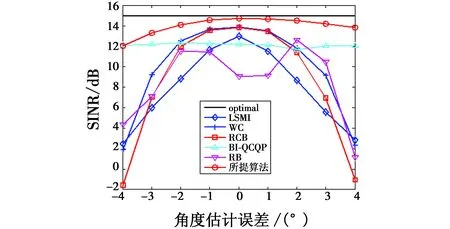
图4 仅存在角度估计误差下的性能比较Fig.4 The output SINRs versus the direction errors
图5为任意失配误差条件下的性能比较,从中明显看出,LSMI算法、WC算法和RCB算法利用采样协方差矩阵的方式,导致算法对于任意失配误差的鲁棒性较差。BI-QCQP算法虽然对方向角度估计误差并不敏感,始终能保证较高的性能,但是在任意失配误差的条件下,其输出SINR性能较差。而基于协方差矩阵重构类算法,由于对采样协方差矩阵中的数据进行了信息发掘,因而其鲁棒性有所提升。RB算法由于干扰角域选取过宽,因此其鲁棒性并不稳定,即出现了“偏折”的现象,而所提的BI-KMC算法缩窄了干扰角域,并对失配误差模型进行多次修正,因而对于任意失配误差均具有较强的鲁棒性。
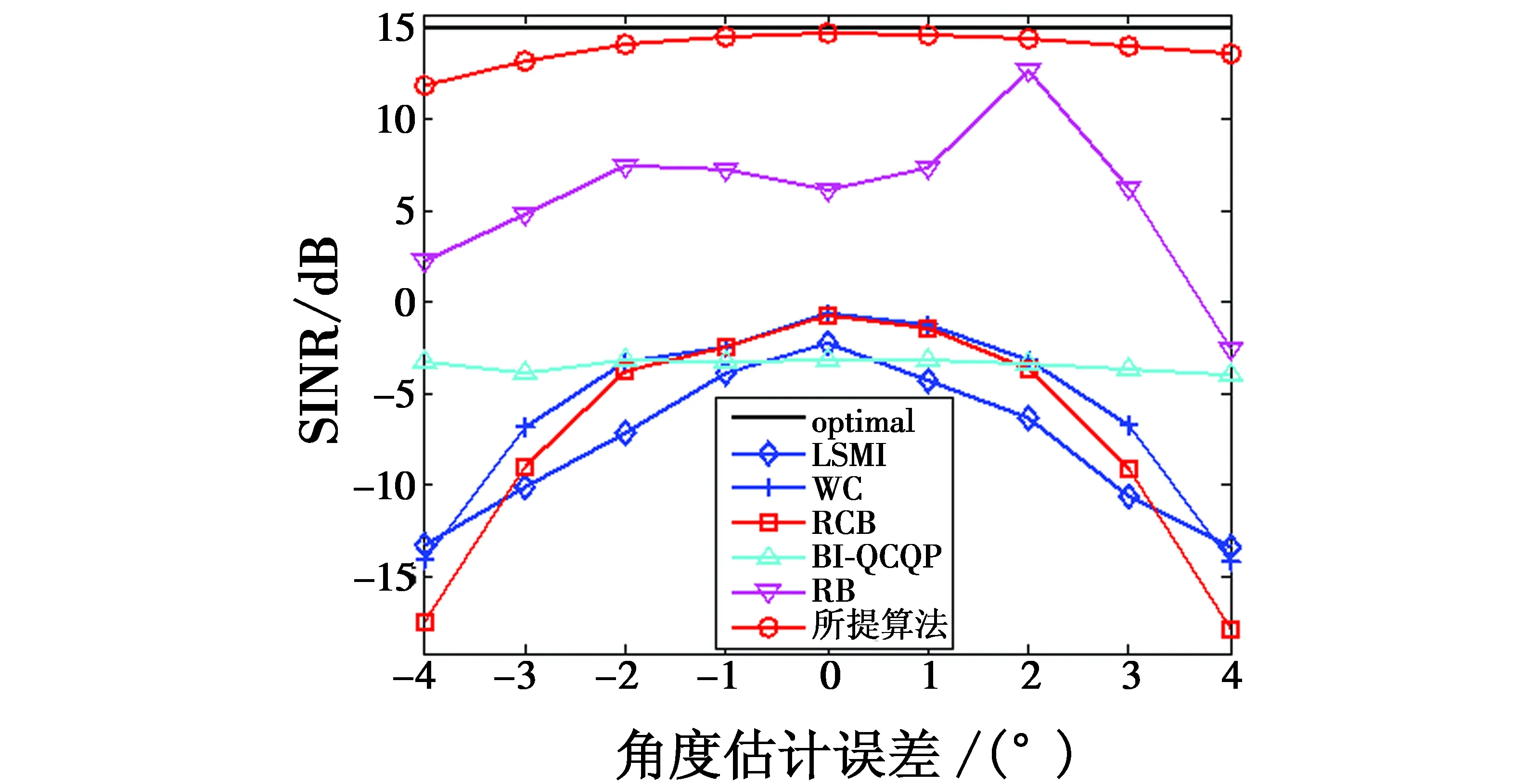
图5 任意失配误差条件下的性能比较Fig.5 The output SINRs versus the random errors
图6和图7所示分别为各算法的归一化方向图和局部放大图。从图6可以看出,所提算法(BI-KMC)在两个干扰处形成了零限,而且零限更深更宽,事实上,这也是所提算法高性能的根本原因。BI-KMC算法除了获得较为准确的联合导向矢量估计值外,还着重增强对干扰的抑制能力。在实际工程应用中,不仅目标信号的方向矢量会出现失配误差,干扰的方向矢量也存在一定的失配误差,所提算法在重构干扰协方差矩阵时,使用干扰角域和小不确定球集来对干扰进行约束,因而对干扰具有很强的抑制能力。

图6 各算法归一化方向图Fig.6 The normalized beam patterns
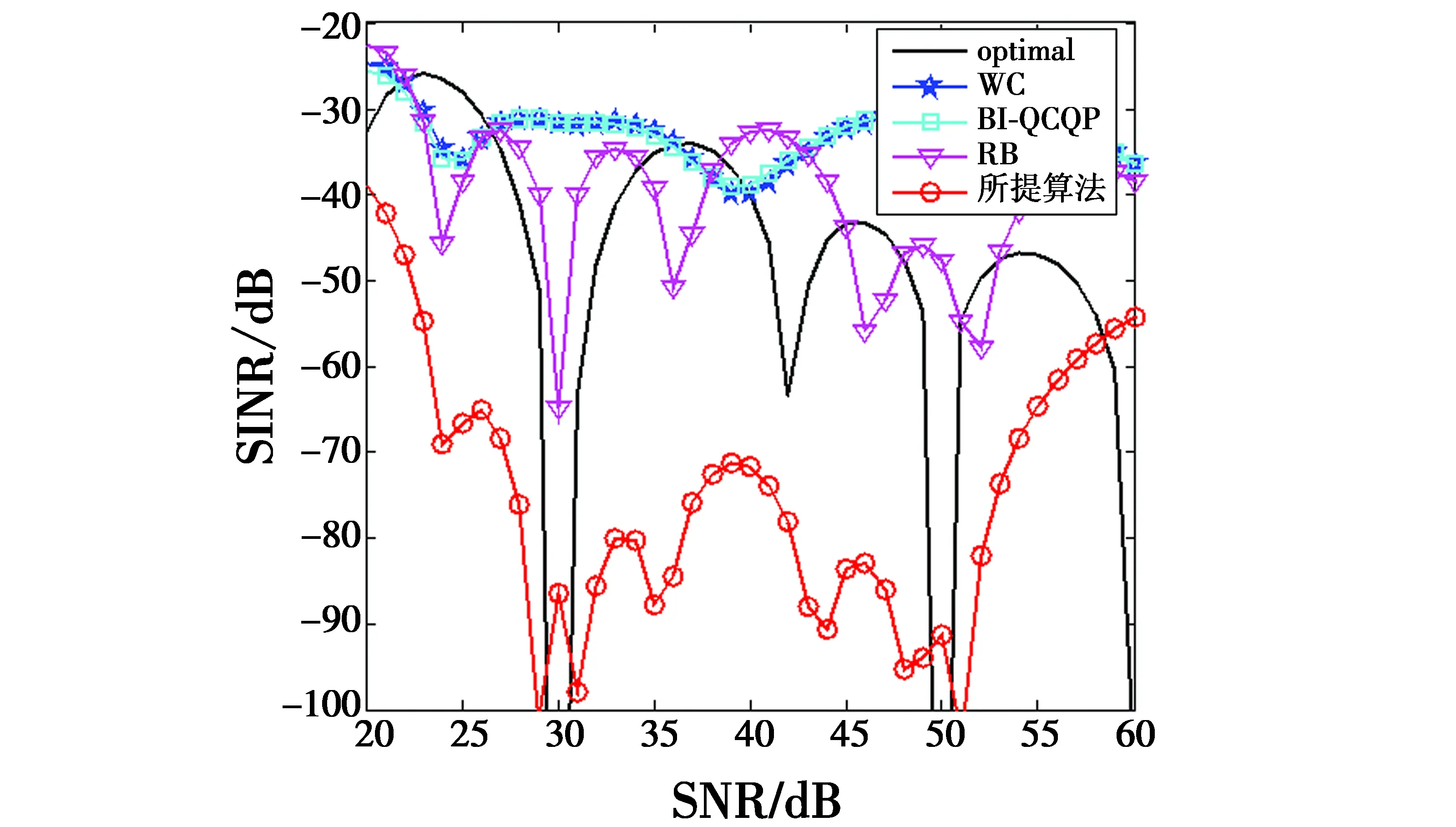
图7 归一化方向图局部放大图
4 结束语
针对高性能与低计算复杂度间的矛盾,本文提出BI-KMC算法对失配误差模型进行修正:一方面基于双边约束的方式,在发射端和接收端分别建立单边导向矢量误差集,然后获取离散的联合导向矢量失配误差集;另一方面基于小不确定集模型结构特点,提出用K-means聚类算法获取少量加权特征采样点来代替原先大量的离散采样点,减少协方差矩阵重构所需采样点数,从而降低计算复杂度。仿真实验表明,所提算法在失配误差较大情形下具有很强的鲁棒性,且输出SINR性能达到最优。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
雷达学报(2018年3期)2018-07-18
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
考试周刊(2016年54期)2016-07-18
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
自动化学报(2016年8期)2016-04-16
电源技术(2015年5期)2015-08-22
