
导弹复合控制系统的神经网络控制器设计
2018-08-17 09:47宋晓娜
电光与控制 2018年8期
宋晓娜, 刘 凯, 宋 帅
(河南科技大学,河南 洛阳 471023)
0 引言
随着科技的进步,传统的气动力制导已经不能很好地满足现代战争的需求,因此,新一代导弹控制技术普遍采用直/气复合控制方法来提高导弹的制导精度。
针对直/气复合控制系统,国内外相关学者已经进行了大量的研究,其中,法国的“紫苑”和美国的“爱国者”导弹均已经成功完成拦截试验[1-2],试验表明直/气复合控制制导与常规气动力导弹相比,具有响应速度快、稳定性高等特点,是实现“趋零脱靶量”的一种有效途径[3]。
导弹直/气复合控制系统具有很强的非线性和不确定性,因此给复合控制系统建模带来很大难度。近些年,国内外研究人员运用滑模控制[4]、自适应理论[5]、模糊控制[6]、最优控制理论[7]、动态逆控制[8]等理论对复合控制系统进行研究,但大都忽略了控制系统中非线性因素的影响。文献[9]针对上述非线性问题,提出了基于滑模变结构的切换控制方法。该方法虽能够有效避免传统比例导引的不足,具有实现简单等特点[10],但没有充分考虑到变结构控制自身引起的抖动影响。
本文针对导弹复合控制系统中的耦合问题,首先采用自适应神经网络滑模控制方法消除了建模中的非线性影响,其次运用变结构控制实现了导弹复合控制设计,同时利用模糊控制对直接力部分进行设计,减小了系统抖振影响,进而完成了整个闭环制导设计。
1 导弹复合控制系统建模
在末节制导过程中,导弹推力发动机已经停止运行,且制导时间较短,因此将导弹的质量m和速度V定义为常值,建立如下导弹动力学模型
(1)

(2)
2 直/气复合控制系统设计方案
导弹复合控制系统需要考虑直接力与气动力的协调问题,气动力主要保证导弹飞行的姿态稳定性,直接力主要负责提高导弹的响应速度,增加复合控制系统的过载能力,导弹复合控制系统回路见图1。

图1 导弹复合控制系统Fig.1 Missile compound control system
2.1 气动力控制方案

(3)
选取滑模面为

(4)
式中,c0>0。对式(4)两边求导可得

(5)
为保证在有限时间内到达滑模面的品质,选取指数趋近律
(6)
将式(5)与式(6)联立后得

(7)
(8)
d(·)=ω*TH(x)+η
(9)
式中:ω*为网络理想权值;η为网络的逼近误差;j为网络隐含层第j个节点;H=[Hj]T为网络的高斯基函数输出,网络输入为x=eT,η≤ηN,则网络输出为
(10)
证明 定义Lyapunov函数为
(11)
(12)
取ξ>ηN,自适应律为

(13)

导弹控制系统渐进稳定,证毕。
2.2 直接力控制方案
取直接力切换控制为
u2=-kλsgnskλ>0
(14)
稳定性是控制系统能正常运行的前提,由于切换控制的引入,会给系统造成一定程度的抖振影响,在此采用s/|s|+r来替换切换控制中的符号函数sgns,以降低控制系统的抖振,整理式(14)得
(15)
为进一步提高直接力的控制效率,提高系统的稳定性,采用模糊控制算法对r进行设计。当过载指令nyc=20时,跟踪误差e变化范围为[0 20],模糊输出|r|>1时会增加脉冲发动机的使用,因此取模糊化论域的输入为e=[-20 20],模糊输出为r=[-1 1],定义模糊化子集如下:e={NB,NM,ZO,PB,PM};r={NB,NM,ZO,PM,PB}。其中,PB为正大,PM为正中,ZO为零,NM为负中,NB为负大,输入和输入子集采用高斯和三角形隶属度函数。
图2所示为模糊隶属度函数,图3所示为模糊输出隶属度函数。
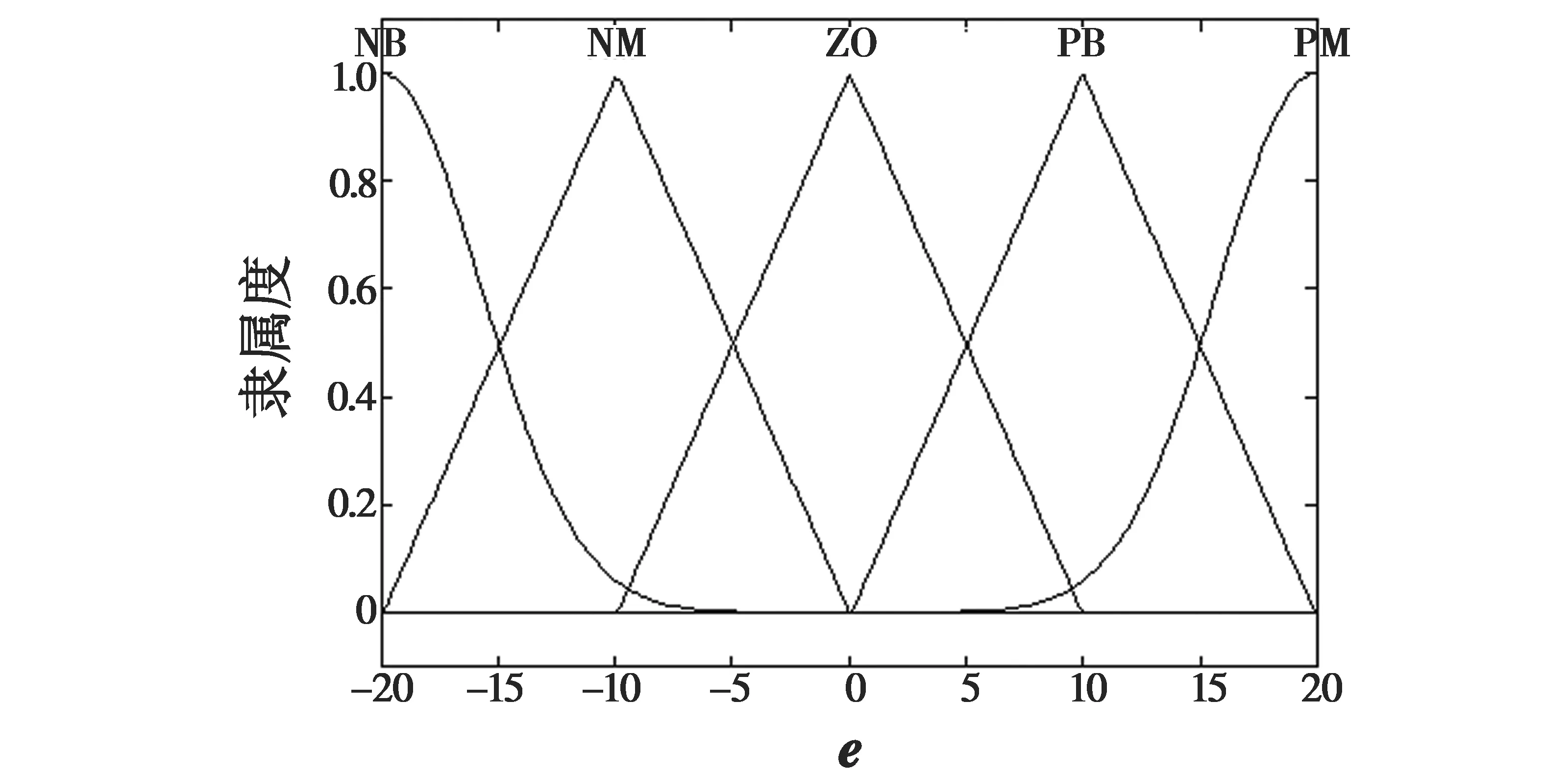
图2 模糊隶属度函数Fig.2 The fuzzy membership function

图3 模糊输出隶属度函数Fig.3 The membership function of the fuzzy output
表1所示为模糊控制规则。

表1 模糊控制规则
由式(15)可知,当kλ过大时,需要更多的脉冲发动机提供推力,因此降低了脉冲发动机的使用效率;当kλ过小时,系统的响应速度过慢,为了获得更高的制导效率,对kλ取关于kλ的函数
(16)
整理后得
(17)
3 仿真结果
本文采用Simulink软件对复合控制系统进行仿真验证,固体发动机的最大推力Fmax=2500 N,工作时间T=0.025 s,动态响应时间为τ=0.05 s,脉冲发动机到导弹质心的距离为l=1 m,N=5为脉冲发动机最大开启数,smax=10.0,smin=2.0,设定导弹的过载指令为Ny=20,仿真结果如图4~图8所示。
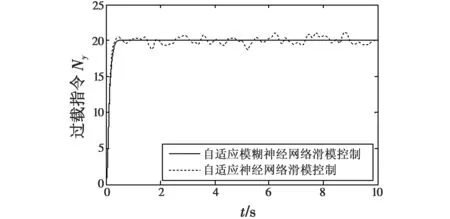
图4 过载跟踪响应Fig.4 Tracking response of overload command

图5 过载跟踪误差Fig.5 Overload tracking error
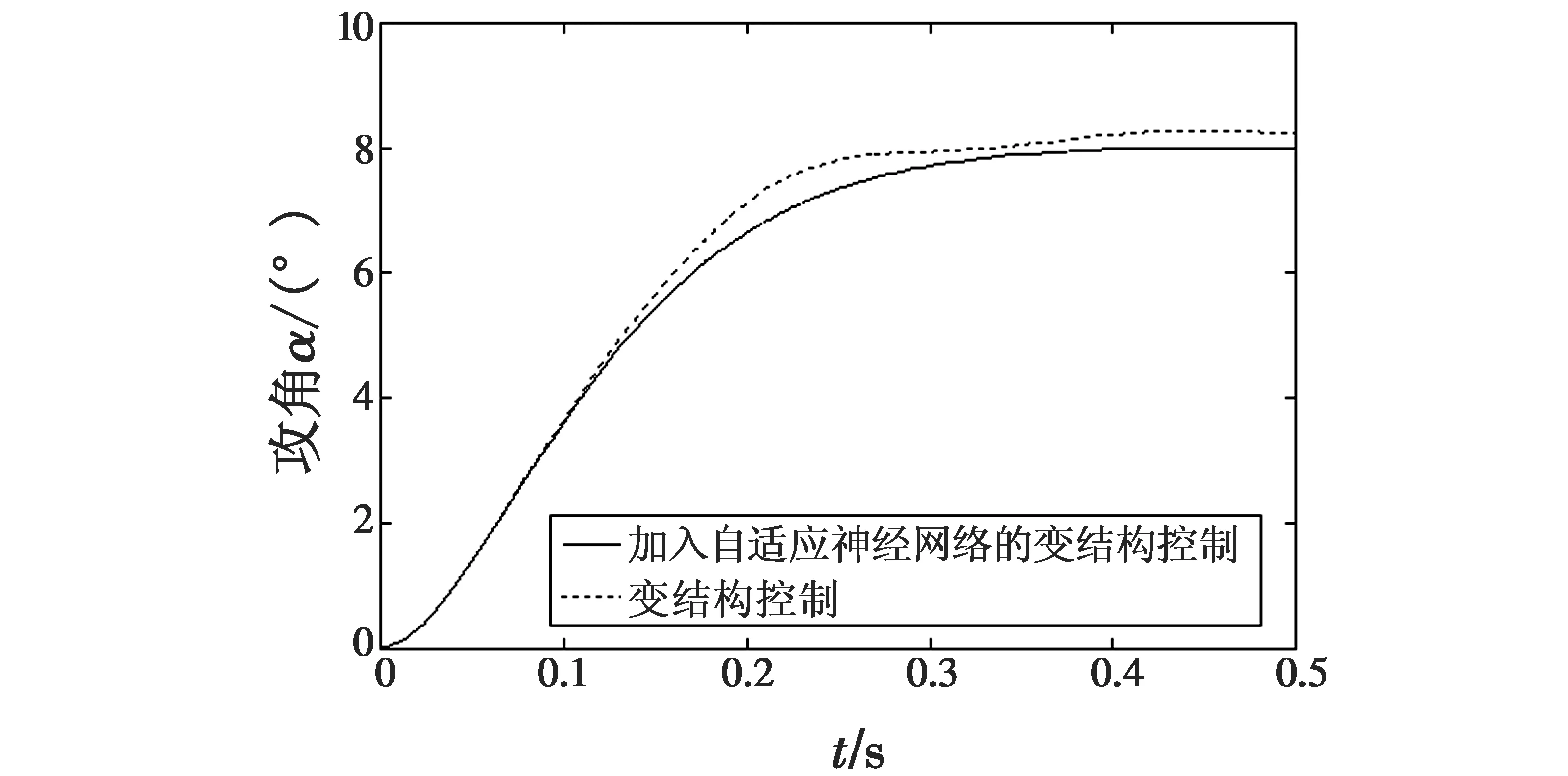
图6 攻角跟踪响应Fig.6 Tracking response of attack angle
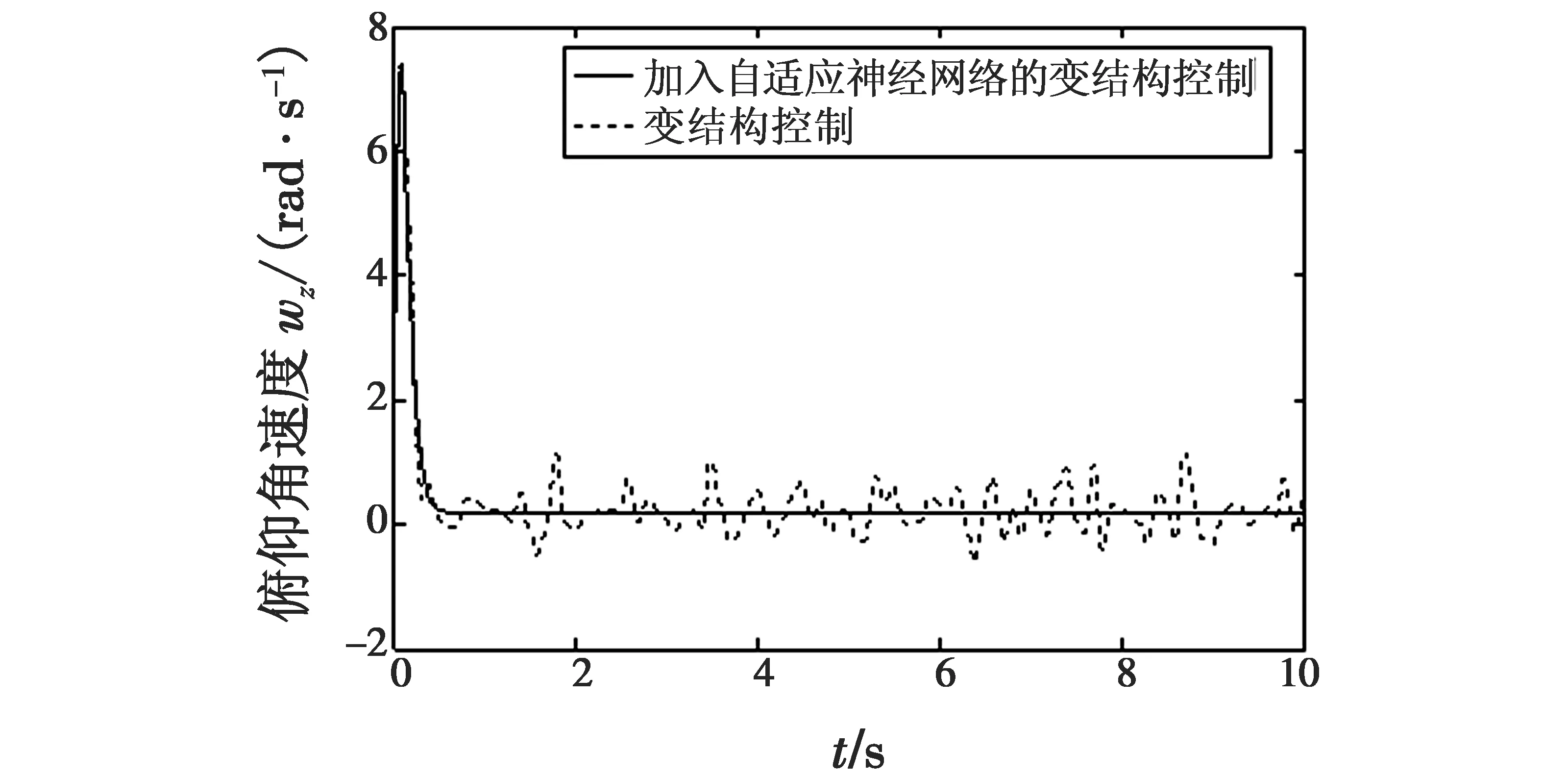
图7 俯仰角速度响应Fig.7 Rate response of the pitch angle
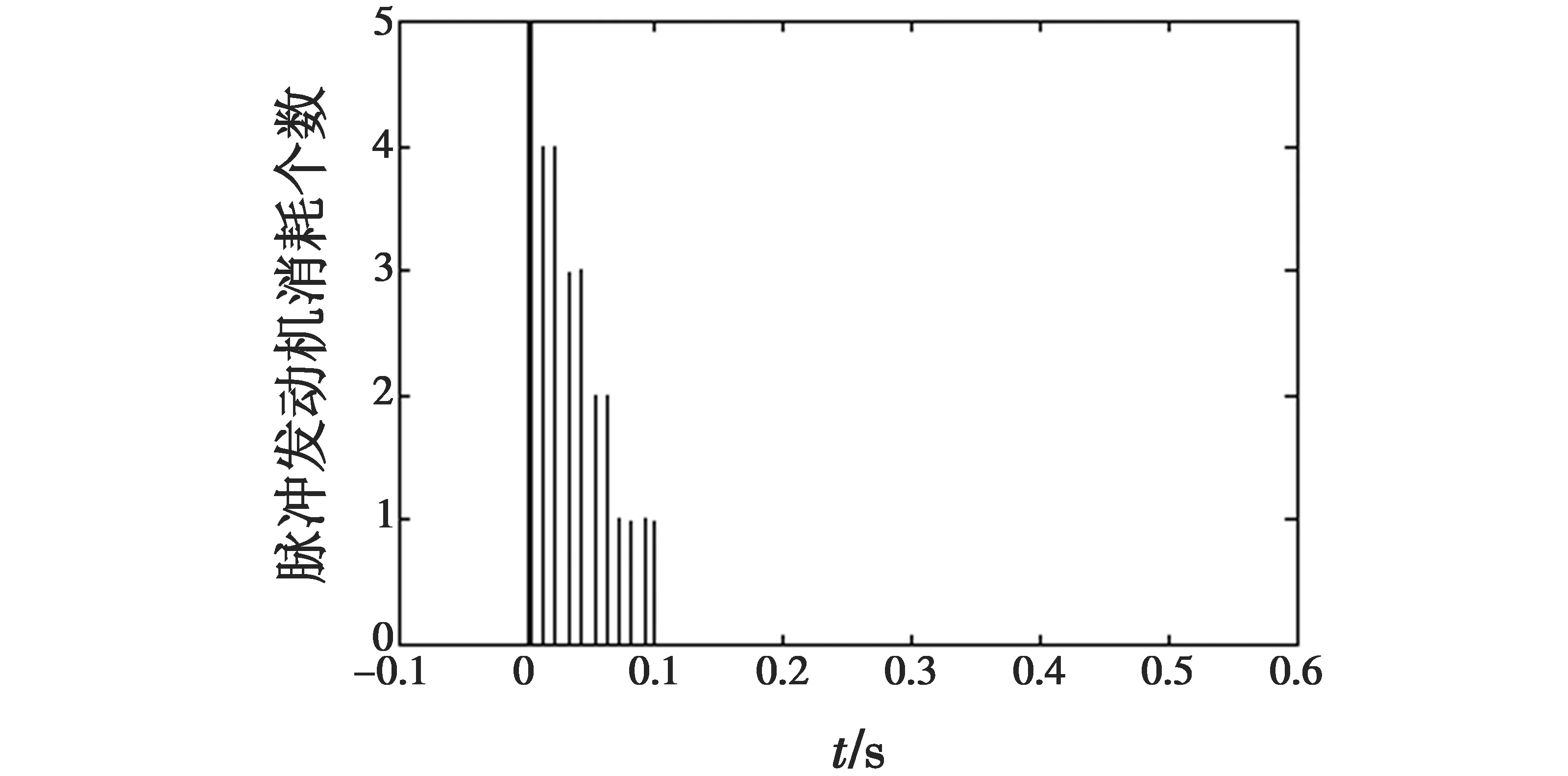
图8 脉冲发动机消耗个数Fig.8 Consumption of the pulse thrusters
通过仿真验证可知,该复合控制器能够很好地实现对过载指令的跟踪,同时自适应神经网络的引入,降低了导弹控制系统的抖振,对复合控制系统的稳定性产生较好的影响。当模糊输出r取值过大时会增加脉冲发动机的使用,利用模糊控制算法对直接力参数r(即模糊输出)进行控制,提高了脉冲发动机的使用效率。
4 结论
本文通过对导弹复合控制系统的研究,首先运用自适应神经网络滑模控制对导弹气动力进行设计,并利用连续函数tan(·)替代趋近律中的符号函数sgn(·),保证了控制系统的稳定性。进一步采用模糊控制的方法,对直接力部分参数进行修订,保证了控制系统的响应速度。最后对导弹数学模型进行了仿真验证,实验结果表明,通过对复合控制系统进行合理的设计,可以在保证系统稳定性的前提下,进一步提高导弹的响应速度,减少脉冲发动机的使用,进而实现精确制导的目的。
猜你喜欢
电子设计工程(2022年15期)2022-08-17
北京航空航天大学学报(2020年3期)2021-01-14
光通信研究(2020年2期)2020-06-15
科技创新与应用(2019年17期)2019-06-09
北京航空航天大学学报(2017年11期)2017-04-23
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
太空探索(2014年1期)2014-07-10
中国铁道科学(2014年1期)2014-06-21
