
临近空间动能拦截器神经反演姿态控制器设计
2018-08-29 05:27张涛李炯王华吉雷虎民叶继坤
航空学报 2018年8期
张涛,李炯,王华吉,雷虎民,叶继坤
1. 空军工程大学 研究生院,西安 710051 2. 空军工程大学 防空反导学院,西安 710051
临近空间高超声速飞行器飞行速度快、巡航高度高、突防能力强,可突破我国几乎所有的防御体系,对我国的空天安全构成了严重威胁,必须研究相应的防御方法[1-3]。动能拦截器(Kinetic Kill Vehicle,KKV)技术已在弹道导弹防御系统中得到了广泛的应用,如美国地基拦截弹大气层外杀伤飞行器(EKV)、美国末端高空防御动能杀伤器和海基标准3拦截弹的大气层外轻型弹射拦截器(LEAP)[4-5]。
与传统大气层内制导武器利用空气动力改变自身姿态不同,KKV通过安装在弹体尾部的姿控发动机来改变弹体姿态。为了搜索目标,KKV通常需要大角度调整,目标锁定之后,需要根据不同的制导策略,控制KKV姿态角跟踪期望的姿态角,从而实现直接碰撞杀伤[6-7]。此外,强烈的气动加热会严重影响导引头的探测精度[8],因此KKV通常将导引头安装在拦截器的侧面来避开导弹头部的热流密集区,即采用侧窗探测技术,侧窗探测对KKV的姿态控制产生了一定的约束和限制[9-10]。因此,研究侧窗约束下高精度的姿态控制是动能杀伤的关键技术。
针对动能拦截器的姿态控制问题,国内外学者取得了诸多可借鉴的成果。文献[11]利用相平面法,设计了用于拦截器姿态稳定的控制器,文献[12]用描述函数方法分析了几种常用的脉冲调制器特性,并设计了稳定控制器。但是,由于描述函数方法采用一阶近似,所以控制精度受到了限制,且稳态抖动较大。文献[13]基于时标分离原理,将姿态分为快慢回路,设计了一种比例积分控制器,文献[14]基于反馈线性化方法将非线性、强耦合、多输入多输出的姿态控制系统解耦成3个独立的子系统,并设计了神经网络PID控制器,但均未考虑外部干扰、参数摄动和质心漂移等未知扰动对控制系统的影响。文献[15-16]基于预测控制理论,设计了一种开关式的姿态控制律,该方法在建模中考虑了拦截器各个通道存在干扰力矩及推力偏心的情况,将系统模型简化为线性模型,并设计了预测控制器,取得了很好的效果,但要求拦截器的转动惯量实时可测,这在工程中很难获取。
滑模变结构方法对干扰和不确定性具有良好的鲁棒性,因而在各个领域得到了广泛的应用[17-18]。通过选择适当的滑模变结构控制律参数可以实现对姿态的精确控制,并具有较强的鲁棒性,但如果存在较大干扰时,容易在滑模面上发生抖振现象,控制精度不高,且发动机频繁开关机易引起弹性振动,这也限制了它的应用。
反演控制易于处理系统中的不确定性和未知参数,同时又避免抵消系统中有用的非线性项,因而在非线性控制中得到了广泛的应用,但鲁棒性不强及“微分膨胀”问题制约了其发展[19-24]。文献[19-20]采用动态面控制,利用低通滤波器或微分跟踪器估计虚拟控制量的一阶导数,很好的解决了“微分膨胀”问题。文献[21-22]将反演控制与滑模控制结合,增强了系统的鲁棒性。文献[23-24]通过采用干扰观测器或神经网络来对误差进行估计和补偿,取得了良好的控制效果。
由于利用非线性控制理论设计的控制器得到的是连续时变的控制量,并不能直接应用于动能拦截器的姿控系统中。针对该问题,众多学者提出了将连续控制量转变为数字变量的脉冲调制方式,如脉冲宽度调制(PWM),脉冲频率调制(PFM),脉宽脉频调制(PWPF)等不同方式[25-27],其中PWPF调制方式以其良好的控制性能被广泛应用于飞行器的姿态控制系统中。文献[25]针对飞行器姿态控制问题,分别从近似线性空间、燃料消耗、发动机工作频率等方面讨论了PWPF调制器的性能;文献[26]针对PWPF调节器参数设置上的局限性,提出了一种非线性目标优化函数,综合考虑了PWPF调制器的线性工作区要求、脱靶量和燃料消耗等制导系统的性能指标要求,应用遗传算法对PWPF调制器的参数进行了优化设计;文献[27]设计了变死区的PWPF调制器,并用描述函数法证明了调制器的稳定性,仿真结果证明了该算法在燃料消耗和控制精度上的优越性。尽管PWPF调制器可以输出不同宽度的脉冲指令,且静态特性与飞行器的参数无关,但其存在相位滞后的问题。
针对以上问题,本文首先建立了临近空间动能拦截器的三通道耦合模型,其次,基于反演控制理论设计了自适应神经反演姿态控制器;然后,采用PSR脉冲调制器将连续的控制律转化为脉冲控制律,实现了常值推力控制;最后,仿真验证了所提方法的有效性。本文的主要创新工作有:(1)建立了姿控发动机侧向喷流干扰模型,并推导了包含质心漂移、参数摄动和外界干扰等不确定因素的三通道强耦合模型。(2)为提高控制精度,采用了RBF神经网络对对各个通道的不确定项进行估计和补偿,并基于最小学习参数的思想,将神经网络学习参数拟合为一个参数,提高了RBF计算效率,保证了估计的实时性。(3)采用了PSR脉冲调制器,将连续控制律转化为脉冲控制律,实现了常值推力控制,并克服了PWPF调制器相位滞后的问题。
1 动能拦截器三通道姿态控制建模
动能拦截器体积较小,可忽略弹性振动,将弹体作为刚体进行研究。描述拦截器质心转动的动力学和运动学方程为[28]
(1)
式中:Jx、Jy、Jz分别为拦截器相对于弹体系3个轴的转动惯量;wx、wy、wz分别为弹体系相对于惯性系的转动角速度在弹体坐标系3个轴上的分量;Mx、My、Mz分别为作用在KKV弹体系3个轴上的控制力矩;dx、dy、dz分别为气动干扰、推力偏心等引起的姿态干扰力矩在弹体系3个轴的分量;γ、ψ、ϑ分别为滚转角、偏航角和俯仰角。
动能拦截器无舵无翼,其姿态调整仅依靠安装在弹体后部的姿态控制系统实现。姿控系统发动机的安装方式如图1所示,通过6个发动机组合工作实现对3个通道的稳定。(2+5)发动机控制俯仰,(1+6)和(3+4)控制偏航,(1+4)和(3+6)控制滚转。姿态控制发动机属于直接侧向喷气式推进器,不能摆转而只能输出垂直拦截器各轴的恒定推力。
姿态控制发动机在弹体坐标系下产生的控制力分量为
(2)
姿态控制发动机在弹体坐标系下产生的控制力矩为
(3)
式中:Fzi(i=1,2,…,6)为每个姿控发动机产生的推力大小;r为一对差动式滚动发动机推力作用线之间的垂直距离;l为俯仰/偏航姿控推力作用线到质心的垂直距离。
结合发动机布局图1可知,在实际的工作过程中,为保证工作的稳定,减小发动机工作对系统的影响,通常姿控发动机成对工作,考虑发动机性能基本一致,则式(3)可简化为
(4)
式中:Fz为单台姿控发动机开机时产生的推力;δFx、δFy、δFz决定发动机是否开关机。

图1 姿控发动机布局Fig.1 Layout of attitude control thruster
当姿控发动机开机时,侧向喷流与外部流场发生干扰,形成结构复杂的干扰流场。喷流使来流产生强烈的附面层分离,使流场内出现斜激波、分离激波、弓形激波、再附激波、分离涡和二次分离涡,在喷口两侧出现膨胀波,喷流区内可能有内激波和马赫盘等复杂物理现象,这种现象称为侧向喷流干扰效应。典型的侧向喷流和外部流场干扰现象如图2所示。
干扰流场非常复杂,具有分布参数特性,目前尚无准确的数学模型来进行描述,几乎所有文献在提到由于侧向喷流与来流相互干扰在飞行器上产生的力及力矩时,都采用推力放大因子KT和力矩放大因子KM来描述。其定义为
(5)
式中:Td为喷流引起的干扰力;Tc为发动机的静态推力;Md为喷流引起的干扰力矩;Mc为发动机在地面的静态力矩;KM也反映了由于喷流干扰引起的压心变化,则直接控制力和力矩的大小为
(6)
因此,考虑喷流干扰情况下,实际力矩可表示为
(7)
式中:Mjx、Mjy、Mjz分别为在考虑喷流干扰情况下,实际力矩在弹体坐标系下各个轴的分量,

图2 侧向喷流干扰效应示意图Fig.2 Diagram for jet interaction effects
ΔMjy、ΔMjz分别为喷流产生的干扰力矩在弹体坐标系Oy1轴和Oz1轴上的分量。

(8)
式中:
由于拦截器在姿态调整或轨道控制时,需要姿轨控发动机开机提供推力,消耗燃料导致拦截器自身转动惯量的变化及质心漂移,故式(8)中的参数存在如下的关系:
(9)
式中:J0、F0、L0分别为J、F、L的初始值;ΔJ、ΔF、ΔL分别为由转动惯量摄动及质心漂移产生的各参数的变化量。

假设2姿态控制力矩的推力矢量作用距离不确定量满足Δli≤lθi,其中lθi为正实数,且i=r,l。

联立式(8)和式(9)可得
(L0+ΔL)u+D(t)
(10)

(11)
式中:
可看出式(11)新变量H(t)为系统的总不确定项,包含外界扰动、转动惯量摄动、质心漂移等未知不确定信息。
2 自适应神经反演高精度姿态控制器设计
2.1 控制器设计
定义角度跟踪误差为
(12)

(13)
设计虚拟控制量为
(14)

定义角速度跟踪误差为
(15)
对其求一阶导数可得
(16)
设计实际的控制量为
(17)

实际控制量式(17)为连续时变控制量,并不适用于KKV控制,这里采用伪速率调制器将连续的量转化为数字式的控制量,实现变推力控制。PSR调制器的结构与PWPF调制器相似,只是一阶惯性环节的位置不同,一阶惯性环节用于补偿施密特触发器在反馈回路中的输出。PSR调制器的原理图如图3所示。
当施密特触发器的输入e(t)大于开机门限uon,输出一个定值1。调制器输入E与1经过指数衰减后相减得新的e(t),当e(t)继续增大或减小到关机门限uoff之前,调制器的输出始终为1;触发器输入e(t)小于uon或减小到uoff后,调制器的输出为0。同理,e(t)为负值时,调制器输出0或-1(负号表示调制器反向开),由此得出调制器的输出。
根据图3写出e(t)的表达式,当继电器开启时
e(t)=Km(E-um)(1-e-t1/Tm)+uone-t1/Tm
0≤t1≤Ton
(18)
当继电器关闭时
e(t)=Km(E-um)(1-e-t2/Tm)+uoffe-t2/Tm
0≤t2≤Toff
(19)

图3 PSR调制器结构图Fig.3 Diagram for PSR modulator
由此得出输出脉冲宽度为
(20)
继电器在一个周期内的关闭时间为
(21)
开关频率为
(22)
最小脉冲宽度为
(23)
PSR调制器继承了PWPF的优点,其静态特性与飞行器的参数无关,输出脉冲与误差幅值和误差速度有关,并且还提供相位超前性能[25,30]。
2.2 有限时间收敛微分器FD设计
为解决“微分膨胀”问题,这里设计有限时间收敛微分器来估计虚拟控制量一阶导数,不失一般性,先构造如下系统
(24)
式中:x1,x2,…,xn∈R为状态变量;f(·)为连续函数且f(0,…,0)=0。

引理1[31]对于如下系统:
(25)
式中:z1∈R,z2∈R,如果系统式(25)满足z1(t)→0,z2(t)→0(t→∞),对于任意的有界输入v(t),R>0,T>0,存在如下的系统:
(26)
满足:
(27)
定理1υ(t)满足假设4,则得到如下新型FD:
(28)
式中:R、ai(i=1,2,…,n)∈R+为待设计参数。则存在φ>0与ιφ>n使得
(29)
式中:O((1/R)ιφ-i+1)为ζi与υ(i-1)(t)的近似程度是(1/R)ιφ-i+1阶的,φ=(1-ϑ)/ϑ,ϑ∈(0,min{ι/(ι+n),1/2}),n≥2。
证明:根据引理1可知,定理1成立。证毕。
注1式(28)中,ζ1,ζ2,…,ζn为系统状态变量,υ(t)为带有噪声的输入信号,ζ1为去除噪声后的跟踪信号,ζi(i=2,3,…,n)为υ(t)的第i-1阶导数的估计值。式(29)进一步表明,估计误差为(1/R)ιφ-i+1的高阶无穷小。则通过选取足够大的设计参数R,估计误差可以任意小。
故虚拟控制量的一阶微分量可以通过式(30)进行获取:
(30)
式中:A1=diag(a11,a12,a13),a1i>0,i=1,2,3;A2=diag(a21,a22,a23),a2i>0,i=1,2,3为待设计的参数;ζ1为X2d的估计值;ζ2为X2d的一阶微分量估计矩阵。
2.3 RBF神经网络模型
神经网络已经被证明具有万能逼近特性,采用神经网络实现模型未知部分的自适应逼近,在控制器中予以补偿,可有效地降低模糊增益,减小滑模抖振。RBF神经网络结构简单、学习与容错能力强,具备对任意非线性连续函数的全局逼近能力[24]。RBF神经网络由输入层、隐含层与输出层构成,其基本结构如图4所示。
RBF神经网络可表示为输入到输出的一种映射关系:
y=WTh(X)
(31)

(32)

式中:n、p分别为输入向量的维数和节点个数。

F(X)=W*Th(X)+μ|μ|≤μM
(33)
式中:μ∈R为逼近误差;μM∈R+为逼近误差的上界。当取足够大的p时,μM可以任意小[24]。

图4 RBF神经网络结构示意图Fig.4 Schematic drawing of RBF neural network structure
若将b与c的取值设置在X的有效映射范围内,则只需在线调节W的元素,即可实现对F(X)的有效逼近。再基于Lyapunov稳定性理论,为w1,w2,…,wp设计使闭环系统稳定的自适应律,即可保证逼近误差的有界性与收敛性。


由于H(t)为未知函数,引入RBF神经网络对其进行逼近
(34)


(35)

(36)
式中:λ=diag(λ1,λ2,λ3)为待设计参数。
3 稳定性证明
定义估计误差为
(37)
将式(14)代入式(13)中可得
(38)
将式(17)和式(34)代入式(16)中可得
(39)
选取如下所示的Lyapunov函数:
(40)
对式(40)求导,并将式(12)、式(14)、式(38)与式(39)代入可得
(41)
考虑到
(42)
有
(43)
又由于
则式(43)变为
(44)
定义如下密集:
(45)

4 数字仿真
为验证本文所设计的自适应神经反演姿态控制律的有效性,以本文典型动能拦截器姿控发动机布局方式为例,针对不同的控制指令信号和干扰进行数字仿真,仿真的初始参数如表1所示,外部干扰和仿真参数摄动值如表2所示。


表1 仿真初始参数Table 1 Initial parameters of simulation

表2 仿真参数摄动值Table 2 Simulation parameters perturbation

图5 动能拦截器姿态角响应曲线(仿真1)Fig.5 Response curves of KKV attitude angle (Simulation 1)

图6 发动机推力曲线(仿真1)Fig.6 Thruster force curves (Simulation 1)
由图5可知,姿态调整分为姿态调节阶段和姿态保持2个阶段,俯仰通道和偏航通道跟踪正弦指令时,其调节时间均较短为0.1 s,跟踪误差俯仰通道不超过±0.1°,偏航通道不超过±0.2°,跟踪性能良好。观察偏航通道跟踪曲线可知,其调节时间0.21 s,稳定控制误差不超过±0.2°。满足姿态控制快速性和准确性的要求。观察偏航通道姿态角跟踪曲线可知,姿态角进入稳态后处于微幅振荡状态,其振荡频率与脉冲开关次数成正比。
由图6可知,发动机开关机序列开始时有一段饱和工作区,这时的脉冲宽度较大,之后进入占空比线性工作区,推力脉冲的宽度也逐渐减小,这反映了PSR脉冲调制器对推力脉冲的调宽调频作用。整个姿态控制阶段,发动机开机频率较低, KKV变推力姿态控制精度高,所设计的控制器控制性能良好。


图7 动能拦截器姿态角响应曲线(仿真2)Fig.7 Response curves of KKV attitude angle (Simulation 2)

图8 发动机推力曲线(仿真2)Fig.8 Thruster force curves (Simulation 2)

图9 动能拦截器无干扰补偿姿态角响应曲线Fig.9 Response curves of KKV attitude angle without disturbance compensation
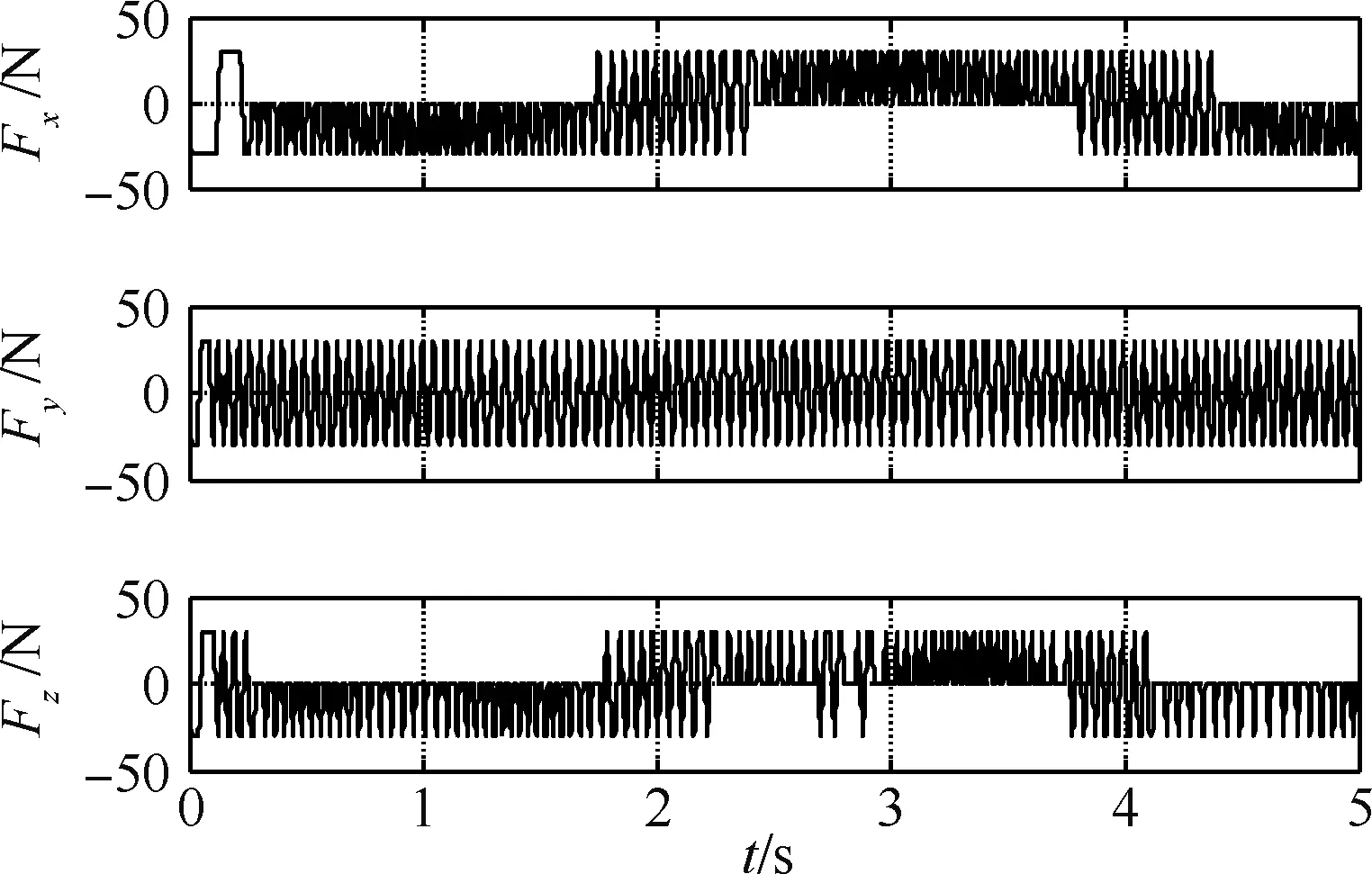
图10 无干扰补偿发动机推力曲线Fig.10 Thruster force curves without disturbance compensation

图11 纵向平面RBF估计值及误差Fig.11 Estimated values and error of RBF neural network
由图7可知,俯仰角跟踪正弦指令时,在有不确定项估计和补偿情况下,俯仰和偏航通道的调节时间较短为0.1 s,俯仰通道跟踪误差不超过±0.15°,偏航通道跟踪误差不超过±0.4°。由图9可以看出,在无不确定项和补偿的情况下,俯仰通道跟踪误差为±0.5°,偏航通道跟踪误差为±1.5°,跟踪误差几乎为有不确定项补偿控制器的3倍。
由图8发动机推力曲线可知,强扰动情况下,发动机开关机频率明显增多,但最小开机时间为50 ms,仍然满足工程实际的要求。由图10可知,在无不确定项补偿情况下,开机频率更高,姿控发动机需要更频繁开机来修正误差。频繁的发动机开机不仅会影响KKV的姿态控制精度,甚至会激发KKV的弹性振动,引起拦截器的失稳。
根据图11可以看出,RBF网络对未知扰动的逼近精度高,其估计误差较小,精确的误差估计和补偿极大的提高了姿态控制的精度,同时发现,纵向平面未知扰动的干扰力矩已经达到了控制力矩的50%。
仿真3将设计的姿态控制器与文献[19]中的控制器进行对比,仿真初始设定与仿真2相同,文献[19]仿真结果如图12和图13所示。
由图12可知,在强干扰情况下,文献[19]中的控制精度出现了较大的误差,其主要原因在于尽管其对误差进行了一定的估计和补偿,但是仅估计了其误差的上界,估计精度不高,故造成了较大的跟踪误差。由图13可知,由于没有精确的误差估计和实时的补偿,使得了姿控发动机频繁开机,造成了严重的能源浪费,且由于采用了PWPF调制器,造成了一定的相位延迟,初始收敛时间更长。
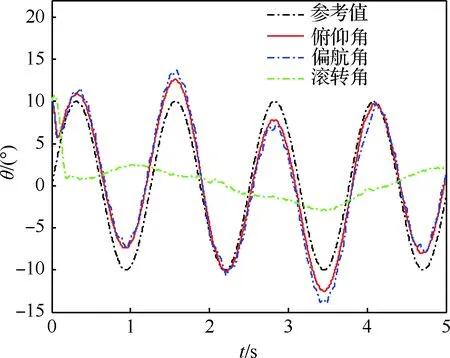
图12 动能拦截器姿态角响应曲线[19]Fig.12 Response curves of KKV attitude angle[19]

图13 发动机推力曲线[19]Fig.13 Thruster force curves[19]
仿真4PSR调制器与PWPF调制器对比分析,PWPF与PSR最优参数取值范围如文献[25]中TableⅡ所示,本文仿真参数选择如表3所示,以典型的阶跃信号为参考信号,PWPF和PSR调制器调制曲线如图14所示。
由图14可得,PSR调制器和PWPF调制器的调制曲线最大的不同点在初始阶段,PSR调制器在初始阶段便开机,直到将误差降低到关机门限时关机,而PWPF调制器则是在初始阶段关机直到误差达到开机门限才开机,这样相比于PSR调制器存在相位延迟,这将可能造成系统的不稳定。同时由图14可以清晰地看到,PWPF调制器的开机时间明显长于PSR,这将会造成燃料的浪费。因此PSR调制器相比于PWPF调制器,其性能有明显的优势。

表3 调制器仿真初始参数Table 3 Initial parameters of modulator

图14 PSR和PWPF调制器响应曲线Fig.14 Modulators of PSR and PWPF response curves
5 结 论
1) 本文基于反演控制理论设计的自适应神经反演姿态控制器,姿态跟踪速度快,控制精度高,对扰动具有较强的鲁棒性。
2)所设计的RBF神经网络能够对各个通道的不确定项进行有效的估计和补偿,收敛速度快,估计精度高,且基于最小学习参数思想将神经网络学习参数拟合为一个参数后,提高了RBF计算效率,保证了估计的实时性。
3) 所设计的PSR脉冲调制器实现了拦截器的变推力控制,并克服了PWPF调制器相位滞后问题。
猜你喜欢
制导与引信(2022年2期)2022-07-22
无人机(2022年2期)2022-05-20
轻兵器(2022年5期)2022-05-19
导弹与航天运载技术(2021年4期)2021-08-23
佳木斯大学学报(自然科学版)(2021年3期)2021-07-05
导航定位学报(2021年3期)2021-06-19
航空学报(2020年12期)2020-12-28
空气动力学学报(2020年5期)2020-11-10
装备环境工程(2020年3期)2020-04-03
电子制作(2019年15期)2019-08-27
