基于无人机倾斜摄影技术的三维实景建模技术研究
2018-08-29 06:16冯启翔
地理空间信息 2018年8期
冯启翔
(1.广州市房地产测绘院(广州市测绘产品质量检验中心),广东 广州 510030)
目前,传统大范围三维城市数字建模的方法主要是测量建模的方法[1,2],测量外业人员采用现场拍照的方法,获得构筑物的外观构造及纹理信息,内业人员根据外业人员采集的照片,结合数字化地形图、正射影像图等数据,建立白模,通过拍摄照片的纹理分析模型的细部结构,最后将拍摄的纹理处理后贴在白模上[3]。使用这种方法建模人工量大,需时较长,出现人为误差的几率增大,并不能满足大范围建模的要求[4]。倾斜摄影技术是国际测绘领域近些年发展起来的一项高新技术[5],通过在同一飞行平台上搭载多台传感器,从一个垂直、4个倾斜等5个不同的角度同时曝光,采集影像[6]。利用倾斜摄影技术可以快速建立三维城市模型,节省了模型细部分析时间,简化了模型纹理采集和处理方法,缩短了项目周期,提高了工作效率,降低了成本[7]。现在,进口倾斜摄影的后处理软件在国内的应用推广以法国ASTRIUM公司的StreetFactory、法国Acute3D公司的Smart3DCapture及瑞士苏黎世联邦工业大学的Gruen和Xinhua开发的TOBAGO与Cyber-City Modeler系统最具代表性[8,9]。
以广州市番禺区海心村美丽乡村的三维实景建模技术为例,通过采用大疆PHANTOM 4无人机获取海心村各个方位的影像照片数据,利用法国Acute3D公司的Smart 3D Capture Master软件进行全自动化的快速建模处理,完成了美丽乡村的三维模型构建。该软件可实现计算机自动建模,所需人工操作简单,通过分析数据建模流程及软件建模的成果,更能为美丽乡村规划建设提供有效的数据支撑和直观的三维实景模型。
1 研究区域与无人机相关参数
1.1 研究区域概况
采用广东省广州市番禺区海心村美丽乡村作为本文三维实景建模技术研究区域,海心村地理位置为22°57′32.94″N、113°30′40.85″E,属于番禺区石楼镇行政区域范围内,海心村区域面积约13 km2,距离番禺中心市区约17 km,离石楼镇城区约4 km,依据番发改函[2016]656号文确认为市级美丽乡村项目。多方位航拍摄影图如图1所示。

图1 番禺区海心村多方位航拍摄影图
1.2 无人机相关参数
研究区域采用大疆PHANTOM 4无人机搭载获取各个方向影像数据的镜头,搭载GPS卫星定位系统、IMU传感器,可以协助无人机获取飞行时的实时图像、深度及定位等信息。具体参数如表1,无人机外观如图2所示。
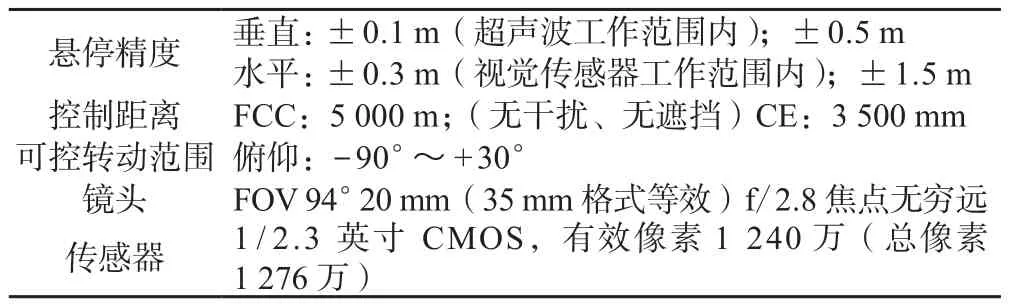
表1 大疆PHANTOM 4无人机参数
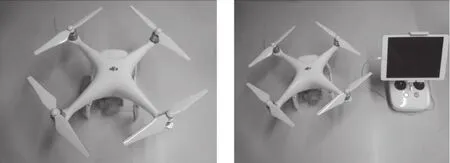
图2 大疆PHANTOM 4无人机外观图
1.3 控制点及检查点设置
根据研究区域概况,外业共布设控制点59个,检查点15个,坐标系采用1980西安坐标系,地形底图数据采用全国第二次土地调查成果,控制点精度符合1∶500大比例尺成图要求。研究区域控制点及检查点分布示意图如图3所示。

图3 研究区域控制点及检查点分布示意图(图中三角点:控制点、交叉点:检查点)
2 关键技术
2.1 解析空中三角测量
空中三角测量按照数学模型可分成航带法、独立模型法、光束法3种,3种区域网平差的对比如表2所示。

表2 空中三角测量三种区域网平差的对比
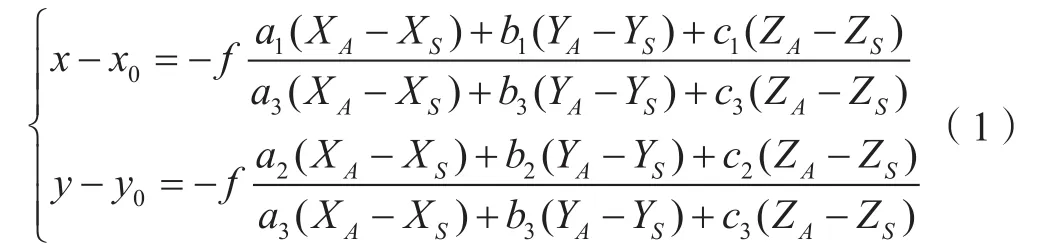
解析空中三角测量的基本数学模型为共线方程式,共线方程式是摄影测量中最基本、最重要的关系式。所谓共线方程就是指中心投影的像方程,即在摄影成像过程中,摄影中心S、像点a及其对应的地面点A三点位于一条直线上。此时,摄影中心S点的物方空间坐标(XS,YS,ZS)、像点a的像片坐标(x,y)以及对应地面点A的物方空间坐标(XA,YA,ZA)满足[10]:
根据研究区域的实际情况,采用Smart 3D Capture Master软件进行空三计算,并开展快速建模工作。
2.2 Smart 3D Capture Master软件参数设置
本文研究区域建模范围呈东西走向,在对该区域建模时需对Smart 3D Capture Master软件进行相关参数设置,主要设置的具体参数有以下几个方面,参数设置例图如4所示。
1)传感器大小参数;
2)焦距参数;
3)空间参考系参数;
4)验证控制点输入是否正确;
5)对验证后的控制点加载相对应的影像照片;
6)检查控制点的分布状况。

图4 Smart 3D Capture Master软件主要参数设置示意图
2.3 三维实景建模工作流程
三维实景快速建模工作具体可划分为两个部分:
1)前期影像数据准备与预处理:①归类正射影像和其他四个倾斜角度所采集的影像数据;②航拍时所设计的航线轨迹图;③处理无人机POS记录数据;④整理像控点数据。
2)三维实景快速建模:①采用Smart 3D Capture Master软件建立工程;②导入处理好的正射影像和其他4个倾斜角度所采集的影像数据,并相应填写传感器大小参数、焦距参数及相机校检,同时查看POS数据信息;③添加像控点,并选择与像控点相关的空间参考系统和高程系统;④空间关系检查,检查确定像控点位置与实际布设情况是否一致;⑤建立“空三”关系模型,选择“空三”在区域内的定位和定向,进行空中三角测量计算;⑥计算提交三维模型,选择分瓦及纹理的大小(此处需注意最大瓦片的纹理不超过100Mpixls),之后可以选择所需的数据产品输出具体的成果,其中数据产品包括三维模型、三维点云、正射影像图,可修饰三维模型,仅用于参考三维模型。三维实景快速建模工作示意图如图5。

图5 三维实景快速建模工作示意图
3 精度评定及结论分析
3.1 精度评定
研究区域采用样本标准偏差计算总体偏差值,具体公式为:

式中,N为样本总体个数,为所选择样本的均值。表3为三维实景模型精度评定结果,如表3数据所示,15个检查点在x、y、z3个方向的标准偏差值分别为0.039 m、0.073 m、0.048 m,标准偏差值显示符合1∶500大比例尺成图的要求。
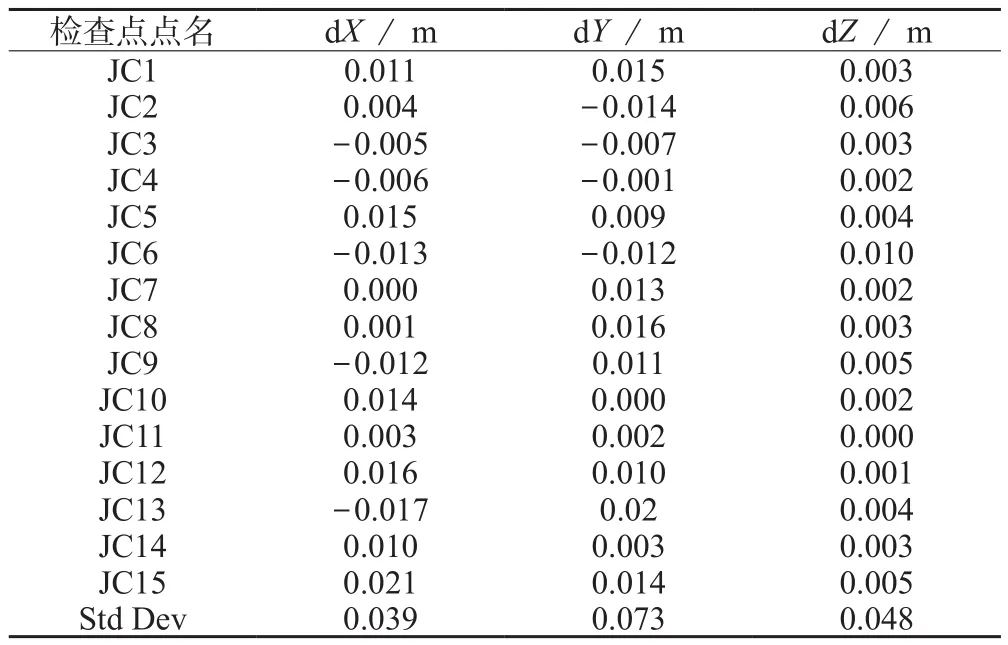
表3 三维实景模型精度评定结果
3.2 结论分析
2018年2月笔者所在单位采用大疆PHANTOM 4无人机获取广州市番禺区海心村美丽乡村的倾斜摄影数据,并实施了快速建模工作,部分模型效果如图6所示。

图6 广州市番禺区海心村美丽乡村部分模型效果
本次无人机倾斜摄影三维实景建模项目共计完成约13 km2的三维建模,模型纹理清晰,表3所示x、y、z3个方向的标准偏差值精度可符合1∶500大比例尺成图要求。在美丽乡村三维实景建模项目中,与正射影像及传统建模方法对比,三维实景建模具有表4所示的优势。经研究表明,结合无人机倾斜摄影技术的三维实景建模可以减少人工工作量,使模型纹理更加清晰,并可量取构筑物标高、长宽及相应面积,另外还可以量测角度及坡度等信息,让政府职能部门人员从多个视角查看各类要素,而且更能反映现状的真实性,现势性尤为显著,最终为美丽乡村规划建设提供重要的数据支持。

表4 倾斜摄影三维建模与正射影像及传统建模对比
4 结论与讨论
利用无人机倾斜摄影技术结合Smart 3D Capture Master软件对广州市番禺区海心村美丽乡村实现三维实景建模之后得出以下结论:
1)能够更好地控制项目成本。相对于传统的建模技术,人工成本减少,劳动强度降低,从而节约了项目成本。
2)能够更好地提高项目效率。在达到项目精度要求的前提下,减少了外业量,缩短了项目周期,并确保项目工期时间。
3)能够更好地表达现势性要素。倾斜摄影三维实景模型中,体现要素齐全,能够客观反映真实性,还原现状情况,为美丽乡村的规划建设提供更为客观的基础数据支撑。
4)能够更好地提供现状信息。倾斜摄影三维实景模型,可供政府职能部门人员量取长度、宽度、标高、高程、面积及坡度等相关的现状信息。
本文的技术方法可推广至广州市美丽乡村各个村庄项目中,为实现建设美丽乡村、建设幸福家园提供规划保障。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
华人时刊(2021年23期)2021-03-08
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
北京航空航天大学学报(2017年4期)2017-11-23
北方音乐(2017年4期)2017-05-04
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28