
光电式电子水平仪设计与实现
2018-08-30 06:02王锴磊王春喜高秋娟
宇航计测技术 2018年4期
王锴磊 刘 莎 王春喜 高秋娟
(北京航天计量测试技术研究所,北京 100076)
1 引 言
现代装备对一些特定系统所在平台的水平精度要求较高,精确测量各平台的水平度也就显得至关重要[1]。随着对测量精度要求的进一步提升,目前,水平度测量基本已经从传统的测量模式转化为电子测量模式。水泡、光学像限仪等传统仪器由人工读数完成,检测方法繁琐、读数困难、精度难以保证,这对水平度的检测和实时监控是一个致命弱点。由此产生了各式电子水平仪,比如液体摆,就是利用了倾斜时液面发生移动从而引起静电容量变化的原理,通过控制系统对电容信号进行采集,实现水平度的测量[2],具有较高灵敏度和可靠性;差分电容式水平传感器是利用动摆片在重力作用下的移动产生差分电容进行水平度测量的,是目前测量精度最高的水平传感器;另外还有液面式、电阻式、电感式、应变式、悬挂式等水平传感器[3]。以这些水平传感器为核心的水平仪可用于测量水平位置的倾斜度、两部件相互平行度和垂直度,机床、仪器导轨的直线度,工作台平面度,以及平板的平面度等参数。大型设备的安装调试,实验室的测量基准均需要对平面基准的测量和校准,而目前电子水平仪的核心部分均采用国外传感器,虽然能够满足大部分的测量要求,但是传感器成本较高,价格昂贵,且大部分为一维测量方式,难以实现二自由度的倾角测量。本文提出了一种两维的光电式电子水平仪的实现原理和设计方法。
2 光电式电子水平仪测量原理
光电式电子水平仪测量原理以反射定律为基本理论模型,依据光学系统的反射定律进行水平度测量,然后通过自准直成像系统将反射角度的变化转化为成像位置的变化,再由三角函数计算角度值,实现水平度测量。如图1所示。

1-反射面;2-入射光束;3-法线;4-反射光束1-Reflector;2-Incident Light;3-Normal;4-Reflex图1 光束反射理论模型Fig.1 Theoretical model of beam reflection
图1A中,入射光束2投射到反射面1上,根据反射定律,反射光束4按照入射光束2和法线3所决定的指向反射出来,这就是我们所说的反射定律。在图1B中,当反射面1旋转角度α时,法线3向同样的方向旋转α,此时,依据反射定律,反射光束向同样的方向旋转2α。
试想,如果通过光学系统保证入射光束为平行光束,则反射光束同样是平行光束,若反射面为表征水平度的液体可反光表面,即可形成如图2所示的水平度测量模型。

图2 水平测量原理Fig.2 Horizontal measurement principle
图2中,XY平面为液体反射表面,即反射面,分划板和CCD传感器分别置于物镜1和物镜2的焦面上。LED光源发出的光经过分划板后形成为光束,经物镜1后以平行光的形式发出,经反射后进入物镜2,最终汇聚于焦面上,在CCD传感器上成像。当反射面分别以X轴和Y轴发生转动时,分化板在CCD上所成的像位置会发生相应的变化,根据需要设计分划板的形状,实现一维或两维的测量。
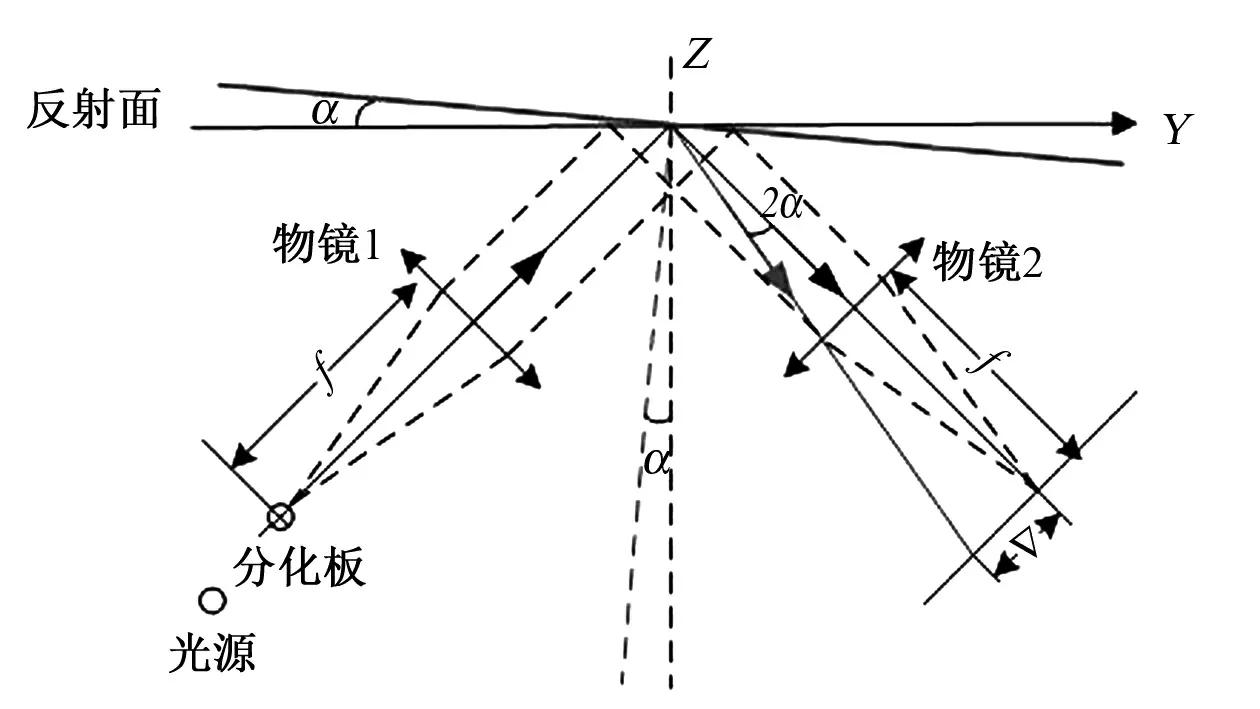
图3 反射测角原理图Fig.3 Schematic diagram of reflection angle
以两维测量为例,当反射面XY绕X轴转动α角度时,光线变化如图3所示。像在CCD上移动的距离Δ与夹角α之间的关系可以表示为
(1)
式中:f——物镜的焦距(物镜1、2是相同的透镜,焦距f相同);Δx——像在CCD的X方向上移动的距离。
系统焦距为已知参数,Δx由CCD传感器进行测量,由此可以计算液体反射表面的偏转角度,从而实现水平度测量。同样当反射面绕Y轴发生转动时,一样可以计算其旋转角度。
(2)
式中:f——物镜的焦距(物镜1、2是相同的透镜,焦距f相同);Δy——像在CCD的Y方向上移动的距离。
3 光电式水平仪的设计
3.1 总体设计
按照前述的光电式电子水平仪测量原理,我们采用“V”字形分划板,一片线阵CCD实现两维同步测量,利用500#的甲基硅油面作为基准液体反射面。这种硅油黏度适中,透光性好,完全满足光电式电子水平仪的设计要求。由此设计了如图4所示的电子水平仪。
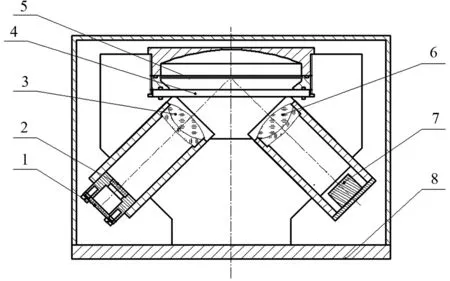
1-光源;2-分划板;3、6-光学镜头;4-平板玻璃;5-硅油表面;7-CCD;8-测量基准面1-Lamp;2-Seam;3、6-Photics lens;4-Flat glass;5-Oil surface;7-CCD;8-Measurement datum plane图4 光电式电子水平仪结构示意图Fig.4 Photoelectric electronic level structure diagram
本系统的主体结构采用硬铝材料加工,加工完成后进行温循处理,充分释放硬力,确保结构的稳定性。底板采用9Cr18材料精加工而成。
在图4中,分划板2放置在光学镜头3的焦面上,光源1发出光束经分划板后以平行光的形式发出,经过平板玻璃4和硅油后在硅油的上表面5反射进入光学镜头4,CCD7放置在光学镜头6的焦面上,此时,分划板在CCD上成像,当电子水平仪的测量基准面8与被测面接触后即可对被测面的水平度进行测量。
本文的设计采用线阵CCD进行两维图像的采集,因此,在本系统中,分划板不采用传统的“一”字型或“十”字型分划板,而采用“V”字型分划板,实现线阵CCD的两维测量,如图5所示。
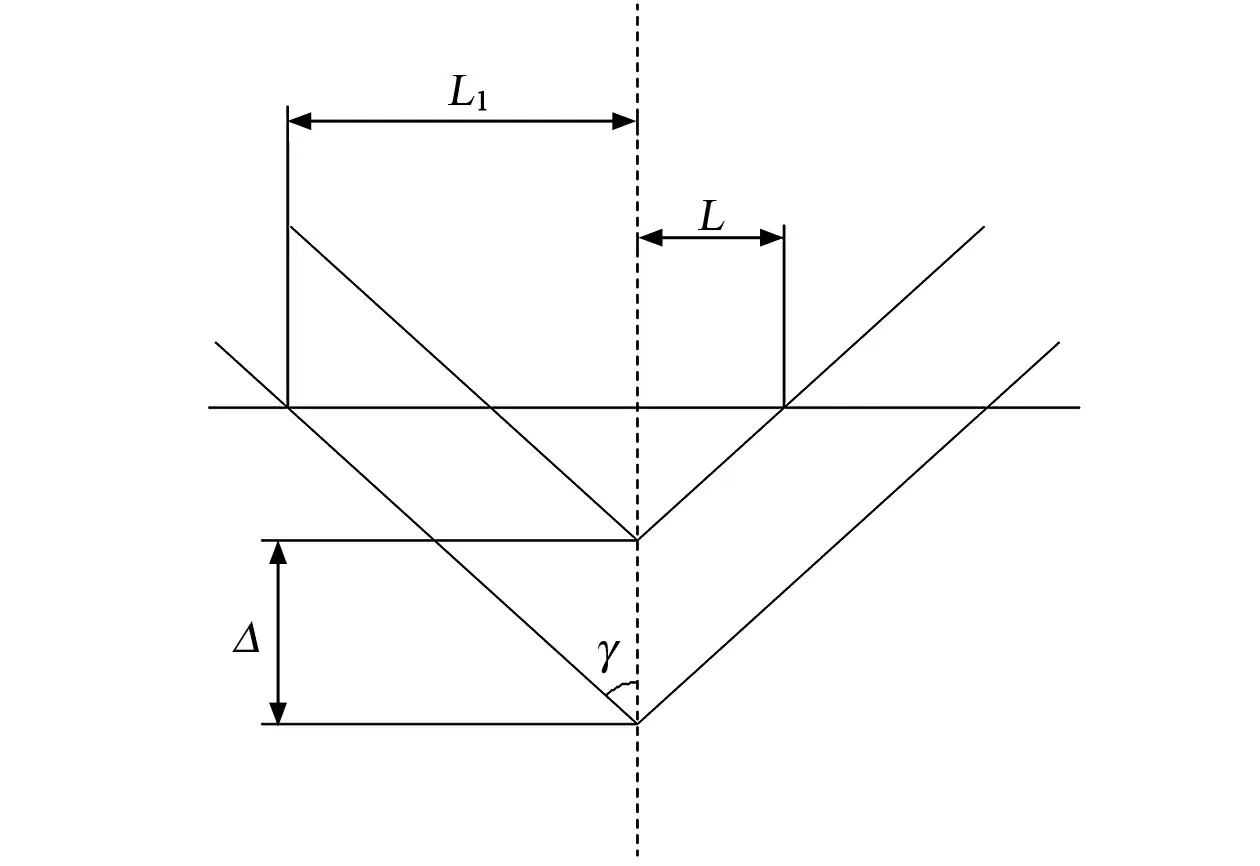
图5 V字型分划板成像示意图Fig.5 V-shaped split plate imaging diagram
如图5所示,“V”字型分划板在线阵CCD上成像时,分别为A点和B点,通过A、B成像位置可以计算其在CCD线阵方向上的变化,其计算公式为
(3)
(4)
式中:Δx——像在CCD的X方向上移动的距离;Δy——像在CCD的y方向上移动的距离;LA——A点在CCD上的成像坐标;LB——B点在CCD上的成像坐标;LA1——A1点在CCD上的成像坐标;LB1——B1点在CCD上的成像坐标;γ——“V”字型分划板夹角的一半。
3.2 硬件设计
本文的线阵CCD图像传感器采用TOSHIBA公司的TCD1304AP,在CPLD脉冲信号驱动下,将光信号转化为电信号,经过视频信号的前端处理与放大后,得到(0~5)V的模拟视频信号。该模拟视频信号经AD9223转换,转换结束后的数字信号写入由SRAM组成的高速缓存中,CPU通过总线接口器件读取转换后结果,进行运算并控制显示,完成一次数据采集工作。CPLD逻辑控制单元负责产生CCD的驱动脉冲,以及其他时钟信号[4]。电源单元为独立的可充电锂电池,在CPU的管理下为系统供电。原理框图如图6所示。
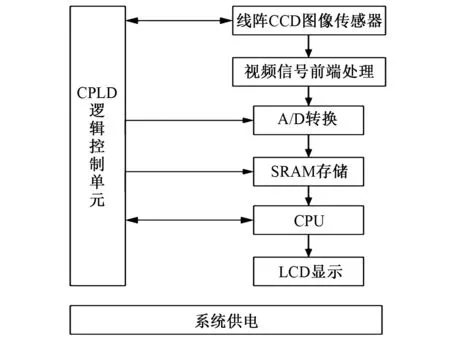
图6 硬件控制系统原理框图Fig.6 Block diagram of hardware control system
基于图6所示的硬件控制原理框图,分别完成了各模块单元的设计。
3.2.1 电源单元
电源系统采用锂电池进行供电,由标准电源适配器对其进行充电。通过电源稳压模块实现稳定电压输出。
本系统采用2节+3.7V可充电的锂电池串联供电,经MAX1776降压到5V,为系统供电;锂离子电池充电采用平衡充电电路,经AC适配器输入。稳压电路连接如图7所示。

图7 电源单元示意图Fig.7 Schematic diagram of the power supply unit
3.2.2 CCD 驱动及前端信号处理
采用可编程逻辑器件CPLD来实现线阵CCD的驱动时序,只需要一片集成电路就可以获得复杂稳定的输出时序,灵活性好,电路体积小。具体实施上采用Altera公司生产的CPLD芯片EPM7128,用硬件描述语言Verilog HDL来实现TCDl304AP的驱动时序,并使用Altera公司的Quartus II软件来编译、仿真和下载。
图8中,ICG、M、SH为TCD1304AP的三个驱动脉冲。TCD1304需要在这三个时钟的驱动下完成光电转换,CPLD逻辑控制单元即产生如图8所示的驱动时序。

图8 TCD1304驱动时序Fig.8 TCD1304 drive timing
在驱动电路的驱动下,TCD1304AP输出信号负极性的模拟视频信号,为尽可能消除噪声干扰、改善成像质量,保证在CCD动态范围内图像信号随被测目标亮度呈线性变化,选用高输入阻抗、运算放大器AD820实现输出模拟视频信号的前端处理与放大。
CCD输出的有效信号OS是经过光积分的有效光电信号,输出接一射级跟随器,能够增强信号的驱动能力。运放U2将OS信号极性取反,U3通过调节电位计R11将OS信号放大至(0~5)V,以供A/D输入。电路图如图9所示。
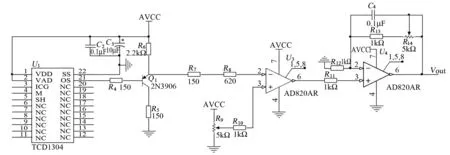
图9 视频信号预处理Fig.9 Video signal preprocessing
3.2.3 SRAM存储单元及控制
前端处理完成的模式视频信号经过AD9223进行模数转换,同步存入双端口 SRAM 存储器 CY7C024AV-25AXI来实现高速缓存功能。系统按如下流程进行工作,由CPLD产生存储器的地址计数,在片选、读写信号的控制下,不断把AD9223转换后的数字信号由右端口写入存储器中。当完整的一帧数据采集、存储完后,通过INT0使CPU产生中断,停止AD转换及SRAM写入,然后CPU通过使能SRAM左端口的输出及片选使能端,就可以依次读出一桢图像数据,并进行分析、处理。
系统控制采用ATMEL公司生产的ATmega128单片机,该单片机采用先进的RISC结构,内部133条指令大部分均能在一个时钟周期内完成,系统时钟可以高达16MHz。该系列单片机性能稳定,运算速度快,完全可以满足系统控制和运算的要求。
3.2.4 显示模块
采用16*2的点阵字符式LCD显示模块LCD1602,内部置有192种字符、数字、字母、标点符号等可显示的字符点阵图形库,并提供可控制的并行或串行接口及通信协议。该模块采用16脚封装,与单片机为并行接口方式,依据MCU并行接口标准进行连接,LCD1602数据端与ATmega128单片机的PB口相连,RS、RW、EN分别与端口D的PD5、PD6、PD7相连。V0接一10kΩ的电位计用来调节液晶显示屏的对比度。
3.3 软件设计原理及实现
3.3.1 CCD信号二值化算法设计
根据对CCD传感器视频信号应用的差异,对CCD视频信号的处理一般均采用二值化的处理方法。二值化处理是把图像和背景作为分离的(1,0)对待。光学系统把被测对象成像在CCD光敏像元上,由于被测物与背景在光强上的变化反映在CCD视频信号中对应的图像尺寸边界处会有明显的电平变化,通过二值化处理把CCD视频信号中图像尺寸部分与背景部分分离成二值电平(0,1)。
光电式电子水平仪软件处理二值化方法主要是通过高速A/D转换器实现视频信号的高速采集,然后根据信号的明暗程度选择适应当前信号的阈值进行二值化处理,高于阈值的CCD像元信号参与后续的数据运算,而低于阈值的CCD像元信号自动舍弃。其较硬件处理方法更为灵活适用,可以方便有效的根据采集到的信号灰度值选择合适的阈值,对于提高光电式电子水平仪的适应性具有较高的应用价值。
3.3.2 CCD象元中值细分算法设计
目前应用比较广泛的线阵CCD像素定位细分算法有:二值化法、重心法以及阶梯法。二值化法分辨率和精度较低,受CCD像元尺寸大小的限制,且CCD信号阈值的取值对测量结果影响较大。采用固定阈值比较简单,但对环境的适应能力比较差
重心法在整体稳定性上高于二值化处理方法[5],且对于波形的不对称性可有效的进行处理。但此处理方法也存在一定的缺陷,当CCD个别像元有一定缺陷时,很容易出现双波峰现象,此时将会严重影响测量的准确度。
在本文中,提出了一种浮动阈值的CCD信号处理方法,CPU根据采集到信号的灰度大小确定阈值,提高了测量的环境适应性和测量稳定性。
本文选用重心法来进行CCD象元的位置提取,它是在二值化的基础上,对高于阈值的部分进行高频采样,然后基于平面几何中积分求重心的原理进行计算的,其公式为
(5)
式中:XC——所求目标的重心位置;Vi——CCD像素单元所对应输出的电压值;i——CCD所对应的象元序列数。
“V”型分划板在CCD上成像输出信号大致如图10所示,电压值高于U1为有效象元,电压值低于U1表征像点的边界。由于“V”型分划板在CCD上成像包含两个像点,本文采用双向扫描的方法,来确定成像点的位置信息。
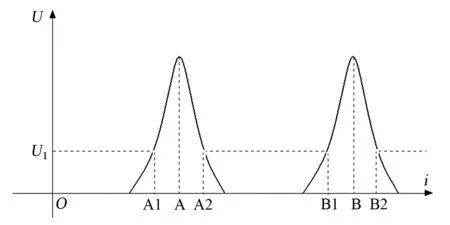
图10 CCD输出信号示意图Fig.10 CCD output signal
基本处理思路如下:已知TCD1304含有3648个象元序号,自左向右i=0递增,检测电压值高于U1的象元个数,当大于3个及以上时,记录最后一个电压值高于U1的象元序号A1,i继续自增,直到检测到有至少3个象元对应的电压值小于U1为止,即A2处,停止扫描。然后根据重心算法,计算第一个成像点的中心位置A。同理,自右向左j=3648递减,检测并计算第二个成像点B。按照图5所示的计算方法既可计算水平倾角。
4 实验验证结果
按照《JJG103-2005电子水平仪和合像水平仪检定规程》对本文设计的光电式电子水平仪进行了技术指标的测试,技术指标如表1所示,测试示值误差如表2所示。从数据可以看出,光电式电子水平仪设计原理正确,水平度测量误差达到2″,可以满足大部分水平度测试的场合。图11给出了测量的线性拟合图。

表1 光电式电子水平仪技术指标

图11 数据线性拟合图Fig.11 Data line fit chart
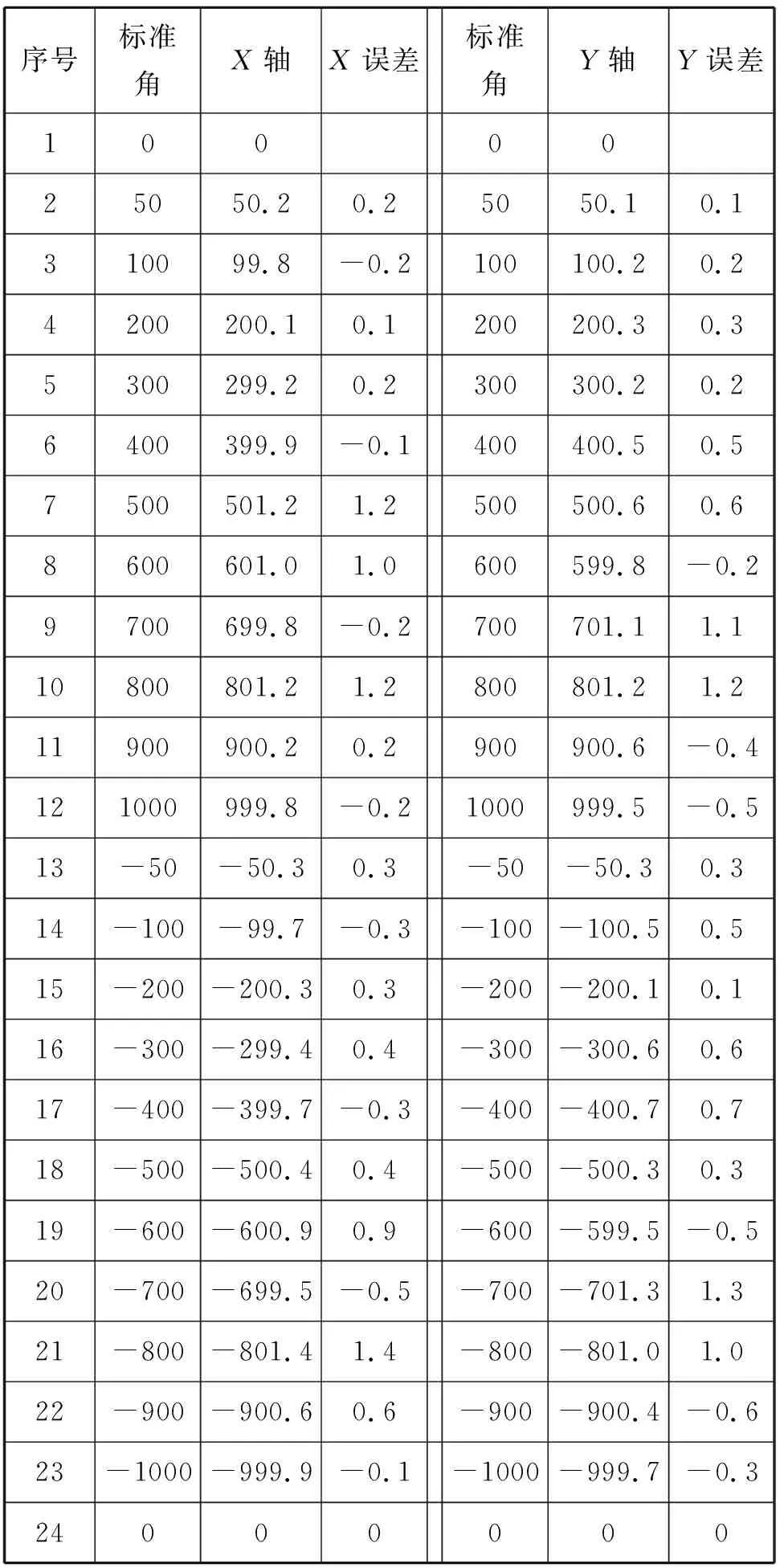
序号标准角X轴X误差标准角Y轴Y误差1000025050.20.25050.10.1310099.8-0.2100100.20.24200200.10.1200200.30.35300299.20.2300300.20.26400399.9-0.1400400.50.57500501.21.2500500.60.68600601.01.0600599.8-0.29700699.8-0.2700701.11.110800801.21.2800801.21.211900900.20.2900900.6-0.4121000999.8-0.21000999.5-0.513-50-50.30.3-50-50.30.314-100-99.7-0.3-100-100.50.515-200-200.30.3-200-200.10.116-300-299.40.4-300-300.60.617-400-399.7-0.3-400-400.70.718-500-500.40.4-500-500.30.319-600-600.90.9-600-599.5-0.520-700-699.5-0.5-700-701.31.321-800-801.41.4-800-801.01.022-900-900.60.6-900-900.4-0.623-1000-999.9-0.1-1000-999.7-0.324000000
5 结束语
光电式电子水平仪融合了光学系统和成像系统,以甲基硅油表面作为水平基准,将其置入准直光学系统中,实现水平度的快速测量和监控,通过线阵CCD和“V”字型分划板实现了两维水平度的测量,目前可以达到水平度2″的测量误差。该型电子水平仪的设计完全抛开了国外高精度的水平度传感器,独立完成传感器的设计和控制单元的设计,具有较高的推广应用价值。随着半导体技术的发展,我们将会进一步完善系统的设计方法和设计思路,提升光电式电子水平仪的测量精度,满足计量检定和工业测量的需要。
猜你喜欢
空间电子技术(2022年3期)2022-08-09
重庆大学学报(2022年2期)2022-02-28
建材发展导向(2021年19期)2021-12-06
纺织科学研究(2021年1期)2021-12-03
计算机仿真(2021年6期)2021-11-17
航天器环境工程(2021年2期)2021-05-12
汽车维修与保养(2021年8期)2021-02-16
航天制造技术(2020年5期)2020-11-10
智能计算机与应用(2020年4期)2020-08-31
科技视界(2020年19期)2020-07-30
