基于功率跟踪曲线切换的变速风电机组虚拟惯量控制
2018-09-18 04:14马少康
电力系统自动化 2018年17期
马少康, 耿 华, 杨 耕, 李 琦
(1. 清华大学自动化系, 北京市 100084; 2. 国网经济技术研究院有限公司, 北京市 102209)
0 引言
随着风电渗透率的不断提高,由工作在最大功率跟踪(maximum power point tracking,MPPT)模式下的变速风电机组构成的大规模风电场代替传统同步发电机接入电网,将导致电网等效惯量减小[1],危害电网的频率稳定性[2-3]。通过引入频率反馈控制,可使风电场具备支撑电网频率的能力,对维持电力系统安全、稳定、可靠运行至关重要[4]。
为了能够支撑电网频率,变速风电机组应在电网频率跌落(升高)时增加(降低)其输出功率。在电网频率升高时,风电机组可通过增加桨距角降低其输出功率,实现手段较为容易,本文不予考虑。本文重点关注电网频率跌落时风电系统的频率支撑能力及控制方法。
文献[5-8]通过控制风电机组升速或调节风电机组桨距角使其降载运行,从而预留一定的转子动能和风电功率备用。在电网频率跌落时,储备的动能和功率备用可用于频率支撑。但是风电机组工作在降载模式下将降低风能利用效率,造成风资源浪费[9]。惯量控制所需的额外能量也可通过加装储能装置获得[10-12],但是加装储能装置势必将增加系统的运营成本。为此,文献[13-15]在风电机组原MPPT控制基础之上引入df/dt前馈控制环节,在电网正常工作时,前馈环节输出为0,风电机组可捕获最大可利用风能。当出现电网频率跌落时,前馈环节将输出额外的功率,从而使风电机组释放转子动能以提供虚拟惯量[16-18]。然而,风电机组原有的MPPT控制环节与df/dt前馈环节存在动态耦合,原MPPT控制环节将部分抵消df/dt前馈控制环节的输出功率,导致虚拟惯量控制的作用被削弱[8]。当电网频率跌落时,通过将风电机组工作曲线从MPPT曲线切换至转速更低的次优功率跟踪(suboptimal power point tracking,SOPPT)曲线,可削弱原MPPT控制环节对df/dt前馈控制环节的抵消作用[19-20]。但是,释放转子动能造成的风电机组转速降低将导致风电机组偏离MPPT工作点,其捕获的风功率也会随之降低。若风电机组转速降低过多,则所捕获风功率的减少可能会给电网频率带来二次扰动[21]。
为削弱原控制环节对df/dt前馈控制环节的抵消作用,并确保风电机组在惯量支撑过程中所捕获的风功率基本等于MPPT功率,本文提出了一种基于SOPPT曲线切换的变速风电机组虚拟惯量控制方法。
1 虚拟惯量控制机理
1.1 变速风电机组模型
通常电力系统惯量响应的时间尺度为秒级,因此可忽略风电机组的电磁暂态过程,将电流内环、变流器以及发电机的电磁暂态过程等效为一个一阶惯性环节[22]。风电机组模型的框图如附录A图A1所示。
风轮机的空气动力学模型为[1]:

(1)
式中:Pm为风轮机机械功率;ρ为空气密度;A0为风轮机扫略面积;Cp为风能利用系数;λ为叶尖速比;β为桨距角;Vw为风速。
叶尖速比表达式[1]为:

(2)
式中:ωr为风轮机转速;R为风轮机半径。
储存在转子上的动能Ek可表示为[1]:

(3)
式中:J为旋转轴系的转动惯量。
1.2 虚拟惯量控制机理
图1所示为NREL 5 MW双馈型风电机组的风功率特性曲线[22],B点为风速9 m/s时的MPPT工作点。风电机组在B点时,转速为1.112 rad/s。风功率特性曲线在B点附近较为平缓。若将风电机组转速升高至1.212 rad/s,风电机组将工作在A点,A点对应的风功率为MPPT功率PMPPT的98%。A点相当于MPPT运行,其捕获的风功率基本相同,但却有更高的转子转速,意味着存储了更多的转子动能。同样的,若风电机组转速降低至0.975 rad/s,则风电机组达到工作点C,工作点C捕获的风功率同样为MPPT功率的98%,但转速更低,动能更少。因此,若将风电机组从工作点A切换到工作点C,则可以保证风电机组在捕获风功率不低于MPPT功率98%的前提下,释放出转子动能。
本文将工作点A定义为MPTwS状态,将工作点C定义为MPTwR状态。电网未发生故障时,风电机组工作在MPTwS状态而非MPPT状态,这样可保证在风电机组捕获风功率基本等于MPPT功率的情况下,使风电机组储备更多的转子动能。当电网发生频率跌落时,切换风电机组至MPTwR状态,可释放转子动能,从而实现对电网频率的支撑。风电机组在惯量支撑过程中,不需要再恢复至MPTwS状态。待系统频率恢复稳定后,再将风电机组缓慢地恢复到MPTwS状态[23]。图1中k为风电机组在MPTwS与MPTwR状态下捕获的风功率与MPPT功率的比例;Pn为风电机组的功率上限;ωrmin和ωrmax分别为风轮机最低和最高转速。
受风电消纳能力的影响,风电机组可能工作在限功率运行方式。此时,仍存在上述动能存储问题,即如何在满足功率调度指令的情况下,尽量多利用转子动能支撑电网频率。本文仅讨论风电机组以MPPT模式运行的情况,所提出的基于曲线切换消除控制环耦合的机理同样适用于限功率运行等工作模式。

图1 风电机组功率特性曲线及SOPPT曲线Fig.1 Power characteristic curves of wind turbine and SOPPT curves
2 虚拟惯量控制结构
2.1 次优风功率跟踪曲线
本文采用了2条SOPPT曲线,使风电机组可在不同风速情况下工作在对应的MPTwS状态或MPTwR状态,如图1所示。当风速小于额定风速时,风电机组桨距角始终为0。可以看出,2条曲线与风轮机功率特性曲线的交点均为稳定工作点。图1中,k可通过实际情况进行选取,不同的k对应不同的SOPPT曲线。2条SOPPT曲线所选取的k均为0.98。
图1所示的SOPPT曲线为分段曲线。以求取MPTwR曲线为例,可首先根据风轮机功率特性曲线选定若干低于MPPT曲线转速,并满足k倍MPPT功率条件的运行点。通过插值法可拟合得到不考虑风电机组运行边界条件时的次优工作曲线。根据转速上下限、功率上限等因素可进一步确定风电机组运行边界线,如图1中虚线所示。但是,运行边界线是垂直(或平行)于坐标轴的直线,横坐标与纵坐标存在“一对多”现象。为构造可用的SOPPT曲线,将风电机组运行边界线向可行区域内偏转一个角度,从而得到W-X与Y-Z线段。W-X与Y-Z线段结合不考虑边界条件时的次优运行曲线,即可得到所求SOPPT曲线,如图1中的WXYZ曲线所示。
2.2 虚拟惯量控制结构
类似MPPT曲线,SOPPT曲线不需要风速信息,风电机组控制方式可采用转速反馈功率外环的控制方式或者功率反馈转速外环的控制方式。本文采用GE风电机组的控制框架[24],即功率反馈转速外环的控制结构。由于控制外环为转速环,因此直接切换SOPPT曲线可改变转速指令,从而实现储备动能的释放。但在实际控制系统中,由于存在转速指令变化率限制器,因此风电机组输出功率的响应存在滞后,无法在电网频率跌落时迅速增加输出功率以降低电网频率变化率,这将在第3节仿真部分进一步阐明。为了能够在电网频率发生跌落时,迅速提供惯量支撑,控制结构中引入了df/dt环节,使得风电机组在正常工作时能够实时监测电网频率f。当电网频率f与额定频率fn的偏差Δf=fn-f,超过设定的阈值Δfth时,风电机组将从MPTwS曲线工作模式切换至MPTwR曲线工作模式以释放转子动能实现频率支撑。控制框图参见附录A图A2,其中的变量说明参见附录A表A1。
在只采用df/dt前馈控制环节而不采用SOPPT曲线切换时,原转速环将会部分抵消df/dt前馈控制环节的输出功率。例如当风电机组工作在MPPT模式下,若电网频率跌落时,则前馈控制环节会产生额外的功率指令并导致转速下降。而由于输出电磁功率上升,根据MPPT曲线,转速指令将会升高。又由于实际风轮机转速是在减小,因此转速环会降低其输出的有功功率指令以期望风轮机能够加速。这就造成了df/dt环节增加的有功指令被转速环减小的有功指令部分抵消,从而降低风电机组的虚拟惯量控制效果。
MPTwR曲线相比于MPTwS曲线在相同功率下对应的转速更低。即使df/dt环节增加了额外的有功功率指令,使得风电机组转速降低,但在采用了SOPPT曲线切换机制后,因为转速环指令被调整到了更低的值,所以原转速控制环对df/dt前馈环节输出功率的抵消作用将被削弱。因此采用SOPPT曲线切换机制能够极大提升虚拟惯量控制的动态效果。
2.3 次优工作曲线恢复机制
电网发生频率跌落后,风电机组工作曲线由MPTwS曲线切换到MPTwR曲线以释放转子动能进而支撑电网频率。当电网频率恢复稳定后,风电机组应重新恢复到MPTwS曲线。为避免恢复过程给电网带来扰动,恢复过程应尽量平缓。MPTwS曲线与MPTwR曲线可分别表示为:
(4)

引入恢复系数g∈[0,1],令

(5)
在恢复过程启动前,风电机组按照MPTwR曲线运行。在切入恢复阶段的初始时刻,令g=0,风电机组仍工作在MPTwR曲线。通过将恢复系数g由0缓慢地增加到1,即可实现风电机组工作曲线的恢复。设定恢复过程的启动延时为Δtar,从风电机组切换SOPPT曲线开始计时,达到Δtar后再启动恢复过程(实际应用时可综合更多信息,如调度指令等)。设定恢复用时trec,在恢复过程中,恢复系数g在trec时间内由0匀速上升到1。
3 算例
本文采用NREL的5 MW双馈型风电机组对所提出的方法进行仿真验证。风电机组的参数可参考文献[22]。风电机组控制系统结构采用GE控制系统架构。附录A表A1列举了风电机组的部分参数以及控制器参数。参数Δfth,Δtar与trec需要综合考虑风电机组特性及电网的等效惯量、调差系数等因素。本文通过采取仿真试错的方式整定系数。
3.1 SOPPT曲线
由于采用了GE控制系统,控制外环为转速环,因此SOPPT曲线的横坐标对应为电磁功率,纵坐标对应为转速指令。采用第2.1节所述方法构造SOPPT曲线,分别考虑了k=0.98以及k=0.99这2种情况。在每条SOPPT曲线的X-Y段,本文选取5个点进行插值。SOPPT分段曲线可表示为:

(6)
式中:a0,a1,b0,b1,b2,b3,b4,c0,c1为拟合系数。
图1中画出的曲线为k=0.98时的2条SOPPT曲线。附录A表A2列出了当k=0.98和k=0.99时,对应各条曲线的具体系数数值。
图2所示为k=0.98时,不同风速情况下风电机组工作在SOPPT曲线与MPPT曲线的各运行参数对比。图2(a)为风电机组转速,可看出MPTwS状态的转速大于MPPT状态下对应的转速,而MPTwR状态转速小于MPPT状态下对应的转速。图2(b)所示为桨距角变化情况,额定风速下,桨距角始终保持为0°。风速大于额定风速时,由图1可看出,SOPPT曲线与MPPT曲线已重合,因此在12 m/s风速及以后,各曲线运行模式下桨距角变化基本一致。图2(c)所示为不同工作状态之间的风功率差值。额定风速下的差值均可维持在2%以内,满足设计需求。当风速超出额定风速后,桨距角动作,风电机组满载运行,各工作模式输出功率相同。图2(d)为MPTwS状态与MPTwR状态之间的转子动能差值。在额定风速以上,风电机组转速已达到最大,因此动能变化为0。且风电机组已满载运行,在不考虑变流器过载运行的情况下,风电机组无法再输出更多的有功功率对电网频率进行支撑。因此,该方法适用于风速在额定风速以下的情况。根据图1所示,由于在5 m/s至6 m/s的低风速段,各SOPPT曲线W-X段重合度较高,因此动能变化不大。在7 m/s至11 m/s风速段,SOPPT曲线之间的动能差值均在0.2(标幺值)以上(动能基准值EB为额定转速下对应的转子动能),在风速10 m/s时,动能储备达到最大的0.31(标幺值)。
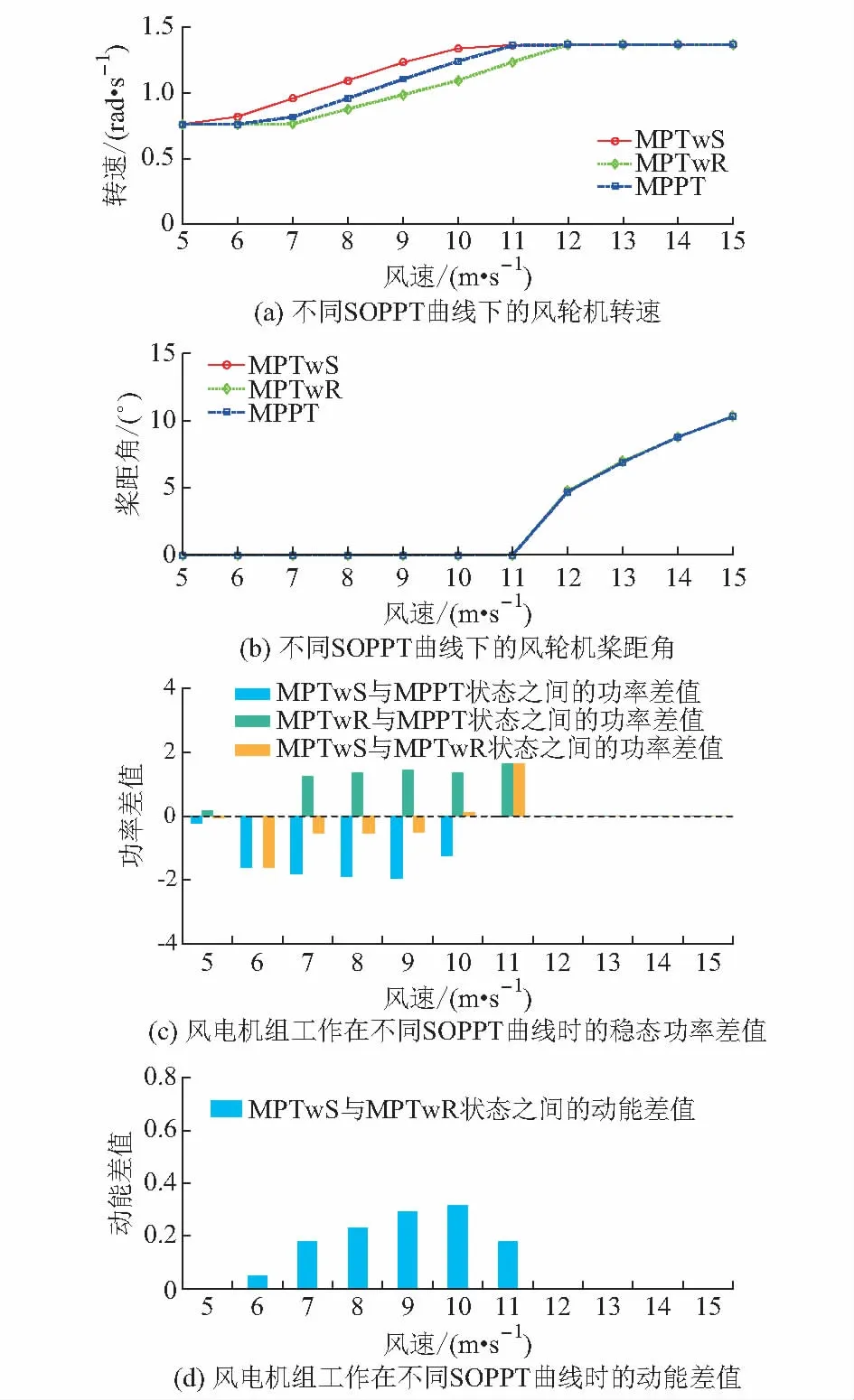
图2 k=0.98时风电机组MPPT与SOPPT运行状态Fig.2 Operation state of wind turbine under MPPT mode and SOPPT mode with k=0.98
图3为k=0.99的运行状态。图3(c)中,各状态之间的功率变化量小于1%,满足设计需求。在图2(c)与图3(c)中,功率变化量与设计值1-k,即2%与1%,存在误差。这是因为SOPPT曲线采用的是曲线拟合的方法获得,且NREL风电机组的风功率特性系数是以离散点的形式存储的[22],从而造成SOPPT曲线与MPPT曲线对应的稳态功率偏差与设计值之间的误差。图3(d)中,在7 m/s至11 m/s风速间均可保证有将近0.1(标幺值)的动能储备。在10 m/s风速时,动能储备超过0.23(标幺值)。

图3 k=0.99时风电机组MPPT与SOPPT运行状态Fig.3 Operation state of wind turbine under MPPT mode and SOPPT mode with k=0.99
3.2 时域仿真
本文采用MATLAB/Simulink仿真平台,对所提惯量控制方法进行时域仿真验证。测试系统中含2台同步发电机、一座风电场以及用电负荷,如附录A图A3所示。采用一台功率倍乘后的单机对风电场单机等效,其容量为600 MW。同步发电机G1容量为1 200 MW,G2容量为300 MW,风电渗透率为28.5%。同步发电机的调速器模型参考文献[25]。在t=41 s时,断开并关S1,同步发电机G2与系统解列,发用电不平衡从而造成电网频率跌落。仿真结果如图4所示。图4中,MPPT曲线表示风电机组工作在MPPT模式下且不采用任何惯量控制措施,MPPT+df/dt曲线表示风电机组只在MPPT模式下采用了df/dt前馈控制环节用于提供虚拟惯量。SOPPT曲线表示风电机组采用了本文提出的曲线切换方法,但是没有加入df/dt前馈控制环节。SOPPT+df/dt曲线表示本文提出的虚拟惯量控制方法。仿真中所用的SOPPT曲线的k为0.99。

图4 仿真结果Fig.4 Simulation results
可以看出,在切除了G2瞬间,电网频率迅速跌落。在只采用df/dt时,电网频率迅速跌落会使df/dt前馈控制环节会产生额外的功率指令。由于电网频率变化率较大,因此风电机组输出功率瞬间增大,转速随之降低。原控制环节因而会调节其输出功率使转速回升。df/dt前馈控制环节输出功率被部分抵消,如图4(b)与图4(c)所示,虽然在电网频率跌落初期可以限制频率变化率,但是频率“探底”值的改善十分有限。只采用SOPPT曲线切换而不引入df/dt前馈控制环节时,转速指令变化率限制器将导致风电机组输出功率的响应存在滞后,如图4(b)所示,风电机组无法在电网频率跌落时立刻注入有功功率。因此频率跌落初期的电网频率变化率并未有明显改善。采用本文所提方法,风电机组可快速提供虚拟惯量响应从而限制电网频率变化率,SOPPT曲线切换机制可削弱转速环对df/dt前馈控制环节的抵消作用,频率“探底”值得到了较大改善。从图4(a)可以看出,采用本文提出方法后的惯量控制效果相比其他方法都有极大的提高。图4波形的变化数值参见附录A表A3。图5仿真结果进一步说明只采用df/dt前馈环节无法有效改善频率“探底”值。

图5 无SOPPT切换时前馈控制环节对电网频率的影响Fig.5 Effect of feed-forward control loop on power grid frequency without SOPPT switching
电网正常时风电机组输出功率为0.39(标幺值)左右。风电机组不采用曲线切换机制,前馈控制环节系数Kd取较大值时,虽然在频率刚发生跌落时能够迅速注入转子动能,抑制电网频率变化,如图5(b)所示,但由于转速下降更快,转速环随后响应使得风电机组输出功率降到0.39(标幺值)以下更小的值,原转速环对前馈控制环节的抵消作用更大,即Kd越大,前馈控制环节抑制电网频率变化的作用就越大,但原转速环对前馈控制环节的抵消作用也越大,最终结果是只降低了频率变化率而对频率“探底”值的改善十分有限。单纯增大Kd无法获得虚拟惯量响应本质上的提升。采用本文提出的方法,将前馈控制环节与曲线切换机制结合,则可极大提高风电机组提供虚拟惯量的能力。图5波形的变化数值参见附录A表A4。
附录A图A4所示仿真波形验证了工作曲线恢复机制,在tr=80 s时,启动工作曲线恢复机制。此时,曲线恢复系数g设为0.006。通过附录A图A4仿真波形可以看出,在采用了本文所提曲线恢复机制后,风电机组由MPTwR曲线平缓地切换到MPTwS曲线。附录A图A4(a)与图A4(b)中,风电机组在保证输出功率不发生较大变化的同时,逐渐恢复转速。附录A图A4(a)表明风电机组的恢复过程对电网频率影响很小,不会引入新的扰动。
4 结语
本文提出了一种基于SOPPT曲线切换的变速风电机组虚拟惯量控制方法。曲线切换机制能够极大削弱原转速环对df/dt前馈控制环节的抵消作用。惯量控制过程中,风电机组捕获的风功率基本等于MPPT功率。算例中,当风速为7 m/s至11 m/s之间,SOPPT曲线的k取0.98时,风电机组储备的动能均大于0.2(标幺值);当k取0.99时,储备的动能均大于0.1(标幺值)。仿真结果表明,采用该方法能够限制电网的频率变换率以及提高频率“探底”值。目前,该方法仅考虑单机情形,未来还需进一步研究在考虑风电场内尾流效应时的场级协同控制方法。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx)。
猜你喜欢
现代电力(2022年2期)2022-05-23
金桥(2022年4期)2022-05-05
人大建设(2018年7期)2018-09-19
能源(2018年6期)2018-08-01
能源(2018年6期)2018-08-01
商周刊(2018年15期)2018-07-27
商周刊(2018年11期)2018-06-13
中国惯性技术学报(2018年1期)2018-05-10
能源(2018年8期)2018-01-15
重庆理工大学学报(自然科学)(2017年5期)2017-06-29