双馈风机等效惯性时间常数计算及转差率反馈惯量控制策略
2018-09-18 04:14刘皓明任秋业张占奎许波峰
电力系统自动化 2018年17期
刘皓明, 任秋业, 张占奎, 李 琰, 许波峰
(1. 河海大学能源与电气学院, 江苏省南京市 211100; 2. 新能源与储能运行控制国家重点实验室(中国电力科学研究院有限公司), 北京市 100192)
0 引言
目前,欧洲许多国家的电网要求风力发电场应能提供有功调节和频率控制等辅助服务能力,至少具备类似于同步发电机组的频率响应及调频控制能力[1]。实际上,为了实现风能的最大化利用,双馈感应发电机(doubly-fed induction generator,DFIG)有功功率控制主要服务于最大功率点跟踪(maximum power point tracking,MPPT)策略,惯量近似为0。考虑到DFIG功率控制速度比常规机组更快,转子动能释放对调频有一定的贡献[2],设计有效的惯量控制方案以激活机组惯性响应能力,对于减轻常规机组调频压力、提高电网稳定性有重要意义。
随着风电机组惯量控制技术研究的逐步深入,含惯量控制的风电机组并入电网后的动态频率特性研究得到越来越多的关注。相关文献研究表明,电网有功功率缺额条件下频率初始跌落速度、频率跌落最低点及发生时间等重要指标均与惯性时间常数H密切相关[3-4]。未采用惯量控制的DFIG,惯性时间常数为0,对系统惯性没有贡献;采用惯量控制策略之后的DFIG具备了响应电网频率变化的能力,等效惯性时间常数即为其惯量响应能力的定量表征,与电网中常规同步发电机组的惯性时间常数相对应,共同影响电网频率动态特性[5]。因此,无论是考量机组惯量控制的作用效果,还是开展含DFIG的电网动态频率特性研究,都有必要对DFIG的惯性时间常数进行定义与剖析。
在风电机组惯量控制策略研究方面,现有的研究和控制方法并不多,其中附加频率微分(supplementary frequency differentiation,SFD)惯量控制方法[6-7]最为经典,是其他风电机组惯量控制方法改进和研究的基础,SFD惯量控制通过在转子侧变流器参考功率值上附加系统频率的微分分量,在电网频率变化时能够快速地提供短时有功支持,但是该方法在频率恢复后会出现二次跌落的现象,加剧了频率波动;附加频率比例—微分(supplementary frequency proportion-differentiation,SFPD)惯量控制策略[8]在此基础上进行了改进,添加了电网频率偏差的比例环节,提供有功支撑的同时改善了频率二次跌落现象,但转子转速的自然恢复需要较长的一段过程,不利于下一阶段系统频率的支撑,增加转速延时恢复环节[9]能够有效缓解该问题,但会使得控制结构更加复杂。分析上述两种惯量控制方案进行频率支撑的过程可知,在电网频率跌落时,SFD和SFPD惯量控制通过减小转子转速释放转子动能来增加机组有功输出,但是转速的降低同时也会导致MPPT控制的有功参考值减小,对惯量控制方案不利。为此,功率跟踪曲线切换(changing maximum power point,CMPP)惯量控制[10]提出通过检测电网频率偏差信号,对风电机组功率跟踪曲线进行切换,从而调节风电机组有功输出以缓解电网频率的突变,该惯量控制方法集成了传统MPPT控制和惯量控制,避免了惯量控制过程中,两种控制方案间的相互影响,但由于控制环节仅以电网频率偏差为控制环节的输入,惯量控制的快速性不佳。
基于此,本文旨在探究含惯量控制的DFIG惯量响应能力的定量表征方法,给出不同惯量控制策略下DFIG等效惯性时间常数的计算方法。进一步,结合具有良好调速性能的异步电机转差率控制方法,提出能够改善机组惯量响应效果的DFIG转差率反馈(supplementary slip proportion-differentiation,SSPD)惯量控制策略。
1 DFIG数学模型及惯量控制方法
在同步旋转坐标系下,采用定子磁链定向的DFIG的5阶简化数学模型包括磁链方程、电压方程、转矩方程和运动方程[11-12]。
磁链、电压方程:
(1)
式中:id,s,iq,s,id,r,iq,r分别为定子、转子绕组的电流在d轴、q轴上的分量;ψd,s和ψq,s分别为定子磁链在在d轴、q轴上的分量;Lm为dq坐标系下同轴定子、转子绕组间互感;Ls为dq坐标系下定子自感;ud,s和uq,s分别为定子电压us在d轴、q轴上的分量。
转矩方程和转子运动方程分别为:

(2)
(3)
式中:Tm为输入DFIG的机械转矩;Te为DFIG的电磁转矩;np为定子绕组极对数;J为DFIG的转子转动惯量;ωr为DFIG转子转速。
采用上述定子磁链定向矢量控制的DFIG转子侧控制见附录A图A1,控制系统采用双闭环结构,外环为功率控制环,内环为电流控制环[13]。
DFIG惯量控制是指当电网频率变化时,通过控制调整转子转速,改变发电机的输出功率,对电网进行短时功率支撑[14]。如附录A图A1所示,现有的SFD惯量控制策略、SFPD惯量控制策略、CMPP惯量控制策略均作用于功率控制外环,具体环节见附录A图A2。
其中,SFD惯量控制环节仅与频率的微分相关,风电机组在转子转速恢复到最大风功率跟踪所要求的最佳状态的过程中,发电机转子加速吸收有功功率容易导致系统有功功率的再次缺额,发生二次频率跌落[15];SFPD惯量控制环节中叠加频率偏差环节,SFPD惯量控制较SFD惯量控制快速性降低,导致输出功率变化减慢,延长了频率稳定后的转子转速恢复时间,不利于机组下一次的惯量响应;CMPP惯量控制通过优化MPPT曲线改变机组有功输出,在频率变化时刻能够提供的支撑有限,不能有效改善频率下降最低值。因此,考虑采用频率是否有二次跌落现象、转子转速恢复速度、频率偏差改善情况对惯量控制环节的控制效果进行描述,结果如表1所示。

表1 惯量控制效果对比分析Table 1 Contrastive analysis of performance of different inertia control links
表1中:转子转速恢复速度是指从机组参与惯量控制开始到发电机恢复初始转速的时间,在具体的算例中可定量,单位为s;频率偏差是指系统频率突变下,频率下降最低值/上升最高值与额定频率之差,在具体的算例中可定量,单位为Hz。
上述对DFIG惯量控制效果的定性分析均是基于惯量控制机理和相关文献,为定量表征含惯量控制的DFIG的惯量响应能力(频率二次跌落、转子转速恢复速度、频率偏差),同时验证机理分析结果的正确性,下面对不同惯量控制策略下DFIG等效惯性时间常数及其计算方法进行研究。
2 惯量控制下的等效惯性时间常数
2.1 DFIG等效惯性时间常数
风电机组虚拟惯性时间常数定义为发电机额定转速时储存的动能与额定容量比值,可以表示为[16]:

(4)

图1给出了含惯量控制环节的DFIG控制模型。需要说明的是,SFD,SFPD,CMPP这3种惯量控制模型均在图1(a)中给出,在分析某种惯量控制方法下的惯量响应过程时,采用其相应的惯量控制模型即可。考虑到电流内环响应速度比发电机的机电暂态过程快很多,本文中将变流器电流内环简化为一个一阶惯性环节Gc(s)=iq,r/iq,r,ref=1/(τs+1),其中τ为变流器时间常数。
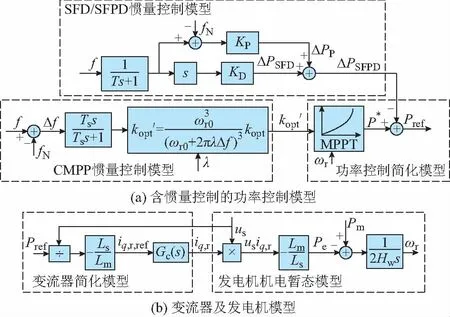
图1 含惯量控制的DFIG模型Fig.1 Model of DFIG incorporating inertia control
风电机组通过改变转子转速,调整有功输出实现惯量响应,电网频率变化时刻的功率增量决定等效惯性时间常数的大小。对于机电暂态时间尺度的惯量响应过程,不考虑定子磁链的动态变化,即可将定子磁链φs视作定值,又因为us=φsωs,ωs近似为1,可近似认为us不变,结合式(2)和图1(b),当发电机电磁有功功率变化ΔPe时,有

(5)
由式(5)可以得出,通过求解电磁功率参考值变化量ΔPref可得到电磁功率变化量ΔPe。分别考虑SFD惯量控制、SFPD惯量控制、CMPP惯量控制的惯量响应过程,对3种惯量控制方法下的等效惯性时间常数Heq1,Heq2,Heq3分别进行计算。
2.2 SFD惯量控制下DFIG等效惯性时间常数
附加频率惯量响应过程中,电磁功率参考值变化量ΔPref包括最大功率跟踪控制提供的ΔP*和惯量控制提供的ΔPSFD两个部分,即
ΔPref=ΔP*-ΔPSFD
(6)
当风速不变和转子速度变化不大时,假设转子速度从ωr0变化到ωr1,有
(7)
式中:各变量均为标幺值;kopt为最大功率跟踪曲线的比例系数;电网角频率从ωs0变化为ωs1,变化量为Δωs=ωs1-ωs0=Δf;KD为微分环节比例系数;T为低通滤波器时间常数。
ΔPref可表示为:

(8)

(9)
转速变化时,转子运动方程为:
(10)
将式(9)代入式(10),得到:

(11)
代入式(4),得到SFD惯量控制下等效惯性时间常数Heq1的频域表达式:
(12)
因为T<1,所以SFD惯量控制下等效惯性时间常数Heq1会出现为负值的情况,且跌落速度快,对应于其惯量响应过程中频率二次跌落,跌落程度与时间常数T相关;惯量支撑能力与KD/T成正比。
2.3 SFPD惯量控制下DFIG的等效惯性时间常数
对于SFPD惯量控制,其惯性时间常数计算与SFD惯量控制类似,区别在于功率辅助调节量中添加了频率偏差环节,如图1所示。同样可以得到SFPD惯量控制下等效惯性时间常数Heq2的频域表达式为:

(13)
SFPD惯量控制下等效惯性时间常数Heq2也会为负,但是由于叠加了频率偏差环节KP,其频率二次跌落程度弱于SFD惯量控制,惯量支撑的效果受KD和KP的共同影响。
由式(12)和式(13)可知,等效惯性时间常数表征了风电机组提供惯量响应的能力,SFD和SFPD惯量控制下等效惯性时间常数Heq1和Heq2均与风电机组本身的惯性时间常数、发电机初始转速、机组MPPT曲线系数、变流器时间常数、自身惯量控制参数相关。
2.4 CMPP惯量控制下DFIG等效惯性时间常数
对于CMPP惯量控制,在惯量响应过程中,其电磁功率参考值变化量ΔPref为改变功率跟踪曲线的比例系数kopt′后,由最大功率曲线得出的有功功率指令值的变化量[10]:
ΔPref=ΔP*=Popt(ωr1,kopt′)-Popt(ωr0,kopt)=
(14)
式中:Ts>1为高通滤波器参数;CMPP惯量控制下等效惯性时间常数Heq3值的变化速度慢,且惯量支撑能力与CMPP控制参数λ成正比。
电磁功率变化量ΔPe可表示为:
(15)
进一步,得到:

(16)
则等效惯性时间常数Heq3为:

(17)
由式(17)可知,与Heq1和Heq2类似,Heq3与风电机组本身的惯性时间常数、发电机初始转速、机组MPPT曲线系数、变流器时间常数相关,除此之外,Heq3还与转速调节系数、电网初始角频率,高通滤波器时间常数相关。
3 DFIG转差率反馈惯量控制策略
通过上文对SFD惯量控制、SFPD惯量控制、CMPP惯量控制机理的分析和相应惯性时间常数解析式可知,这3种惯量控制方法均能够使得风电机组在电网频率下降时刻增发一部分有功功率,减小电网频率偏差,且各具优势:SFD惯量控制响应速度快;SFPD惯量响应过程中能够提供更多、更持久的有功支撑;CMPP惯量控制可确保在调速过程中机组运行的稳定性,避免惯量控制方案和MPPT方案之间的相互影响。但3种方法各有不足,存在频率二次跌落、转速恢复慢、频率偏差改善效果不佳等问题。针对惯量控制中出现频率二次跌落、转速恢复慢的问题,需要在增大机组快速有功输出的同时,限制转子转速的变化速度、幅度,使转子转速(转差率)在一定范围内变化;针对惯量控制对频率下降幅值改善效果不佳的问题,需要加强电网频率信号与惯量控制输出信号的耦合,同时提高机组有功注入的快速性。基于此,本文提出了DFIG转差率反馈惯量控制策略。
如式(18)所示,在基于定子磁链定向的DFIG矢量控制中,发电机电磁转矩是通过解耦出的转子电流转矩分量进行控制的。
(18)
其中,转子电流q轴分量指令值iq,r,ref由功率外环决定,实际上是按照最大功率跟踪的功率目标进行给定,从而实现DFIG的有功、无功功率解耦控制。为了使DFIG具备惯量响应的能力,可以对式(18)进行如下调整:

(19)
式中:Te,ad为惯量控制下的发电机电磁转矩增量;iq,r,ad为Te,ad对应的转子电流q轴分量的增量。
DFIG运行曲线见附录A图A3,额定风速以下且风电机组未达到额定转速时保证捕获最大风能(恒Cp区);额定风速以下且风电机组达到额定转速时保持额定转速不变(恒转速区);风电机组达到其额定转速和额定功率时保持机组输出功率不变(恒功率区)。本文中主要考虑风电机组处于恒Cp区,此时iq,r指令值按照最大功率跟踪的功率目标给定,该部分实现DFIG的转矩控制的基本目标;iq,r,ad用于虚拟出DFIG的惯量特征,实现风电机组对于所并电网频率变化的抑制作用。
考虑到DFIG稳定运行时,转差率sw很小,电磁转矩可近似为[17]:

(20)
式中:Km为机械特性参数;Φm为气隙磁通;ωs为电网同步角频率;Rr为转子电阻。
当保持气隙磁通不变时,电磁转矩近似与转差率sw成正比,控制sw就相当于控制电磁转矩,利用转差率来控制电磁转矩,可实现平滑而稳定的调速效果。同时,转差率sw=(Δωs-Δωr)/Δωs中包含电网频率变化的信息,采用转差率控制能够建立风电机组和电网之间的耦合,使得转矩能够响应电网频率的变化。因此,构造电磁转矩增量Te,ad,采用式(20)所示转差率控制,并将其应用于基于定子磁场定向的矢量控制框架中,有

(21)

(22)
采用比例—微分(PD)调节器对式(22)中转差率进行控制,则DFIG的转子电流转矩分量可表述为:

(23)
为加强电网频率与DFIG转矩控制的耦合,指令值sw,ref取电网同步角频率的标幺值。

(24)
基于转差率反馈的惯量控制如图2所示。
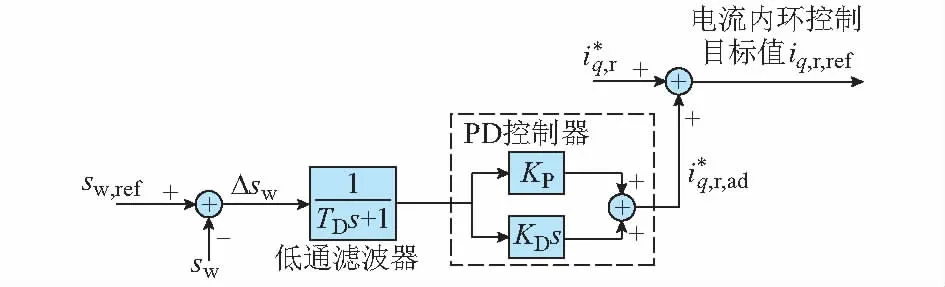
图2 基于转差率反馈的惯量控制Fig.2 Inertia control based on slip feedback
PD控制器之前设置低通滤波环节,减轻控制器中微分作用对系统稳定性的影响,同时利用其延时特性,使得微分输出调节电流给定值的时间增长,其时间常数TD设置为3 s;PD控制器的控制参数KP和KD分别对应着转差率当前的动态偏差信号和预计动态偏差信号,本文中取KP=0.8,KD=1.2,此时控制效果较为理想[18]。
为定量表征转差率惯量控制下DFIG的惯量响应能力,有必要对等效惯性时间常数进行计算。结合图1(b)和式(5)可知SSPD惯量控制下电磁功率变化量ΔPe由转子电流q轴分量参考值变化量Δiq,r,ref直接决定,即
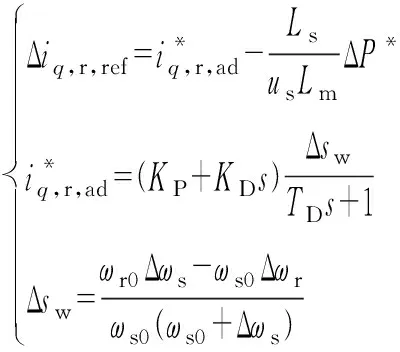
(25)
将式(25)代入式(5),得到:
(26)
将式(26)代入式(10),得到:
(27)

进一步代入式(4),得到SSPD惯量控制下等效惯性时间常数Heq4的频域表达式:
(28)
由式(28)可知,Heq4始终大于0,SSPD在惯量支撑过程中不会出现二次跌落的现象,且控制参数KP,KD,TD共同影响惯量控制效果,包括频率支撑改善能力和转子转速恢复速度。同时,除惯量控制参数、风电机组本身惯性时间常数、发电机初始转速、机组MPPT曲线系数、变流器时间常数之外,Heq4还与DFIG电感参数、电网初始角频率相关。
4 算例分析
利用DIgSILENT平台建立仿真系统(见附录A图A4)。系统模型中,60 MW风电场(采用单机等值模型)由30台容量为2 MW的DFIG组成[19],经两级升压,通过架空线路并入电网,电网采用单机无穷大模型。
额定容量2 MW的DFIG参数:定子漏感Ls=0.1,转子漏感Lr=0.1,励磁电感Lm=2.9,均为标幺值;额定风速为11 m/s,固有惯性时间常数Hw=0.226 s,变流器动作时间τ=0.02 s;为进行准确有效的对比,各种惯量控制下的控制参数取值参照文献[7,9,10]按各自的最优控制效果取定,其中,SFD惯量控制参数KD=30,T=0.1 s;SFPD惯量控制参数KP=90,KD=6,T=0.1 s;CMPP惯量控制参数Ts=6 s,λ=6。仿真过程中假设风速恒定为额定风速,仿真时长为15 s,在0.4 s时,20 kV母线处负荷突增20 MW,造成电网频率下降。
4.1 风电机组等效惯性时间常数对比验证
仿真中,风电机组等效惯性时间常数Heq的实际值通过提取风电机组惯量响应过程中的Δωr/Δωs,代入式(4)计算得到,如图3所示。
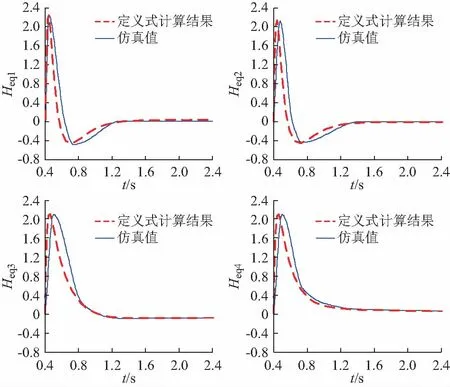
图3 Heq计算值与仿真值比较Fig.3 Comparison between calculated value and simulated value of Heq
由图3可知,本文所提的DFIG等效惯性时间常数定义式计算值与仿真值趋势相同,较为吻合,基本验证了所得定义式Heq的正确性。
结合图3,可分3个阶段对等效惯性时间常数的变化特征进行描述。
1)快速响应阶段:从频率下降的初始时刻t=0.4 s开始,惯量控制迅速响应,电网频率变化减缓。对于Heq,风电机组转速迅速减小,使得Δωr/Δωs增大,Heq随之增大,其中,SFD惯量控制、SFPD惯量控制环节由于频率微分的存在,响应速度快,Heq1和Heq2很快达到最大值。
2)转速恢复阶段:Heq到达最大值后迅速进入转速恢复阶段。在该阶段,SFD惯量控制、SFPD惯量控制、CMPP惯量控制转速快速回升,使得Δωr/Δωs减小至负值,其中,SFD和SFPD惯量控制下转速变化量的绝对值更大,等效惯性常数曲线下降得更为明显,而SSPD惯量控制始终通过协调Δωr和Δωs之间的关系来实现惯量响应,Δωr/Δωs的变化较为平缓。
3)趋于稳定阶段:随着电网频率变化率逐步趋向于0且风电机组转速恢复至额定值,Δωr/Δωs逐渐减小,Heq随之减小,惯量响应过程结束,Heq最终趋于一个定值。
进一步分析图3计算曲线可知,Heq到达最大值的时间表征了惯量控制的响应速度;Heq>0表示惯量响应持续有效的作用过程;Heq<0表示转速恢复过程中转子转速未与电网频率同步变化,转速恢复到超过额定转速,由此整理得表2。

表2 Heq计算值曲线对比分析Table 2 Contrastive analysis of calculated value curve of Heq
由表2可知,Heq1和Heq2到达最大值的时间短于Heq3和Heq4,这表明SFD和SFPD惯量控制的响应速度快于CMPP和SSPD惯量控制。Heq2持续大于0的时间大于Heq1,这是因为SFPD在SFD惯量控制的基础上增加了频率偏差信号,在电网频率恢复之前惯量控制始终起作用,延长了惯量支撑的持续时间;CMPP惯量控制根据频率偏差信号对MPPT曲线进行切换来调整机组的有功出力,惯量支撑持续时间延长且转速变化较慢,因此Heq3>0的时间明显长于Heq1和Heq2;Heq4在趋于稳定之前始终大于0,使得在SSPD惯量控制下风电机组完成了惯量支撑和发电机转子转速恢复。对应于Heq1和Heq2小于0的时间段,SFD和SFPD惯量控制下的机组仍在恢复转速,目标是将回升的转速拉回至额定水平;虽然CMPP惯量控制下转速变化不大,但因为转速调整慢,Heq3往往需要经过较长的时间才能趋于稳定。
4.2 不同惯量控制策略的控制效果对比
对所提的SSPD惯量控制方法进行仿真,得到频降响应曲线,与现有的SFD惯量控制、SFPD惯量控制、CMPP惯量控制进行对比分析,如图4所示。
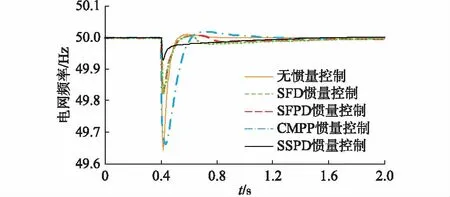
图4 频降响应Fig.4 Frequency drop response
由图4可知,风电机组未采用惯量控制时,电网频率在负荷突增后迅速到达最低值49.65 Hz,频率最终稳定在50 Hz,但频率恢复过程中出现超调。比较4种惯量控制环节下的频降响应,SFD和SFPD惯量控制均可以使频率下降的最低值限制在49.82 Hz以内,且频率下降速度减缓,但是,前者的频降曲线在后期出现一定程度的二次下降;SFPD惯量控制在SFD惯量控制基础上增加了频率偏差控制,转子转速变化减缓,频率二次下降现象有所改善;CMPP惯量控制对频率下降最低值的改善效果不明显;SSPD惯量控制对频率下降幅值的改善效果最佳,达到49.94 Hz,同时由于采用转差率作为控制变量,频率响应曲线没有超调,且转速恢复时间短于SFD惯量控制。
由图5可知,4种惯量控制方法都通过添加惯量控制环节使得风力发电机电磁转矩增大,转子转速降低,短时增发一部分有功功率以抵抗频率的变化。
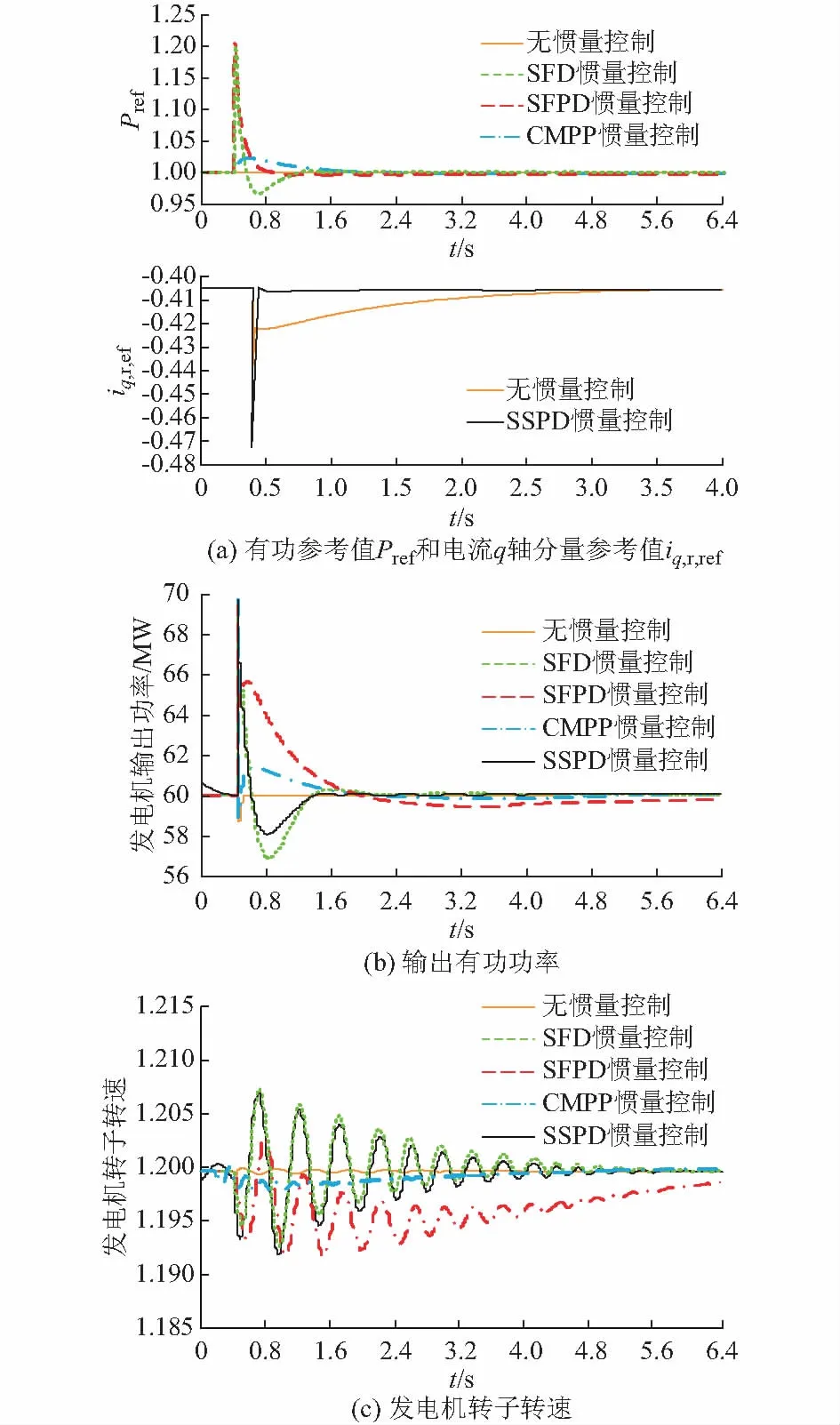
图5 风电机组响应曲线Fig.5 Response curves of wind turbines
图5(a)显示负荷突增时刻,SFD和SFPD惯量控制和CMPP惯量控制下风电机组转子侧变流器有功给定值Pref增大,其中,SFD和SFPD惯量控制下增幅达到0.2(标幺值),且增速快,CMPP惯量控制下增幅为0.025(标幺值),Pref的增加使得发电机电磁转矩增大,转子动能大量释放,输出功率迅速增加。同时,SSPD惯量控制修正了频率下降时刻的转子电流q轴分量给定值iq,r,ref,使其幅值增大了0.07(标幺值),从而增大电磁转矩至0.99(标幺值),减小转速,实现惯量控制。
如图5(b)所示,输出功率在增大之后会下降到额定值之下,这是由于机组转速下降之后风力机输出机械转矩降低,使得发电机的电磁转矩降低到风力机输出机械转矩之下以恢复转速,同时输出功率减小[20]。由图5(b)可知,SSPD惯量控制下有功增幅最大,约为0.15(标幺值),CMPP惯量控制下的有功增幅最小,约为0.025(标幺值)。
由图5(c)可以看出,4种惯量控制方法中,SSPD惯量控制下转子转速能够较快回到正常运行状态。
综上可知,基于转差率反馈的DFIG惯量控制策略在减小频率偏差上的效果优于SFD和SFPD及CMPP惯量控制,而且无频率二次跌落现象、转速恢复较快。
5 结语
本文对DFIG惯量控制策略进行研究,完成了以下两方面的内容。
1)给出了不同惯量控制下等效惯性时间常数的解析表达式,并分析了影响DFIG惯量控制效果的因素。
2)结合具有良好调速性能的异步电机转差率控制方法,提出了SSPD惯量控制策略。算例分析显示,该策略能够更好地改善机组的惯量支撑效果,有效改善电网稳定性。
需要指出,本文对于如何利用等效惯性时间常数去定量表征频率二次跌落、转子转速恢复速度、频率偏差等机组惯量支撑效果指标还未深入探讨,只是进行了定性的描述;同时,DFIG的SSPD惯量控制策略只用于对电网频率的短时支撑,起到短期调频的效果,考虑全工况的、完善的DFIG频率调节策略仍值得进一步研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx)。
刘皓明(1977—),男,通信作者,教授,主要研究方向:新能源发电接入、电力系统分析与控制和电力市场。E-mail: liuhaom@hhu.edu.cn
任秋业(1992—),女,硕士研究生,主要研究方向:新能源发电及并网技术。
张占奎(1985—),男,硕士,高级工程师,主要研究方向:新能源发电及并网技术。
猜你喜欢
现代电力(2022年2期)2022-05-23
重型机械(2019年3期)2019-08-27
中国惯性技术学报(2018年1期)2018-05-10
重庆理工大学学报(自然科学)(2017年5期)2017-06-29
防爆电机(2015年6期)2016-01-27
中北大学学报(自然科学版)(2015年6期)2015-12-02
电气开关(2015年2期)2015-06-23
湖南理工学院学报(自然科学版)(2014年4期)2014-07-19
物探化探计算技术(2014年1期)2014-06-27
电气电子教学学报(2013年1期)2013-07-05