基于物联网的侦查与救援机器人的设计
2018-09-20 02:10仇智睿丁万康杨恒张晖
电子测试 2018年17期
仇智睿,丁万康,杨恒,张晖
(空军航空大学航空基础学院,吉林长春,130022)
1 系统整体设计
本系统结构如图1所示,由3部分构成,分别为侦察小车、手机APP和救援小车构成,通过WiFi使两小车能与Android手机APP端进行相互间通信,可以实现基于物联网的侦查与救援。

图1 系统结构
侦查小车上装有红外、超声波、角度、温度、湿度、火焰等多种传感器,使得小车能在自平衡的基础上能够按照预先设置的路线进行自主侦查,使用wifi模块作为服务器,可以实时传输传感器采集的数据数据至手机APP端。
手机APP端可以实时显示传感器的各项数据,一旦数据出现异常,可以通过wifi控制救援小车出发救援。
救援小车上装有红外、超声波、角度等各种传感器,可以自主循迹,也可以由手机APP和语音控制行走,同时,救援小车上装有风扇等救援设施,可以实施救援。虽然只装有风扇,但可以根据需要扩展多种救援设施。
本系统通过设置wifi模块的初始值实现了一对多的通信,在数据传输量较少的情况下实现了物联网的功能,将其应用于战场的勘察与救援,高度的节省了人力物力,同时,我们也可以通过手机APP的监控了解环境态势。
2 硬件设计
硬件框图如图2所示:包含了侦察小车、救援小车与通信部分。

图2 硬件框图
2.1 侦查小车部分
小车由两块arduino板进行操作,两块arduino板之间用所定义的软串口进行通信调配。上部分负责控制指令的收发,下部分控制小车行进。同时上板接入各种所需的传感器与wifi模块,通过程序来接收并发送相关数据反馈Android端、通知救援小车。
2.2 救援小车部分
救援小车基本构架与侦查小车相近,但搭载的传感器因任务而有不同。其wifi模块作为接收端使用,在接收到监视器端或侦查小车的指令后,进行相应的动作,完成救援任务。救援小车上装有风扇,如图3所示。
灭火风扇模块:模块接口说明:VCC接5V正极,IN接单片机(使能端信号为低电平驱动)、GND接地。

图3 灭火风扇
2.3 通信部分
通信方面由多块 esp8266 wifi模块组成,启动时,按特定的顺序将各wifi板的信息进行初始化,将侦查小车的wiFi板设置为服务器,将救援小车和监视屏设置为客户端并进行编号,即可实现一对多通信。通过设计的程序来返回主小车传感器接受到的信息,在监视屏上显示,并设置临界值调动救援小车进行报警并实施救援,同时,也可通过监视屏端的相应指令来控制侦查与救援小车。无线模块的传输流程图如图4所示。

图4 无线模块传输流程图
3 软件设计
软件流程图如图5所示,必须先启动侦查小车,然后启动救援小车,最后启动Android端进行连接。这样的顺序的原因是它们启动的先后顺序决定了他们在服务器端的标识,若不能按顺序连接,则无法把消息发送给指定的对方。
手机APP可以显示温度、湿度、火焰等传感器的数据,当发现异常时,救援小车出发救援并灭火。APP页面布局如图6所示。
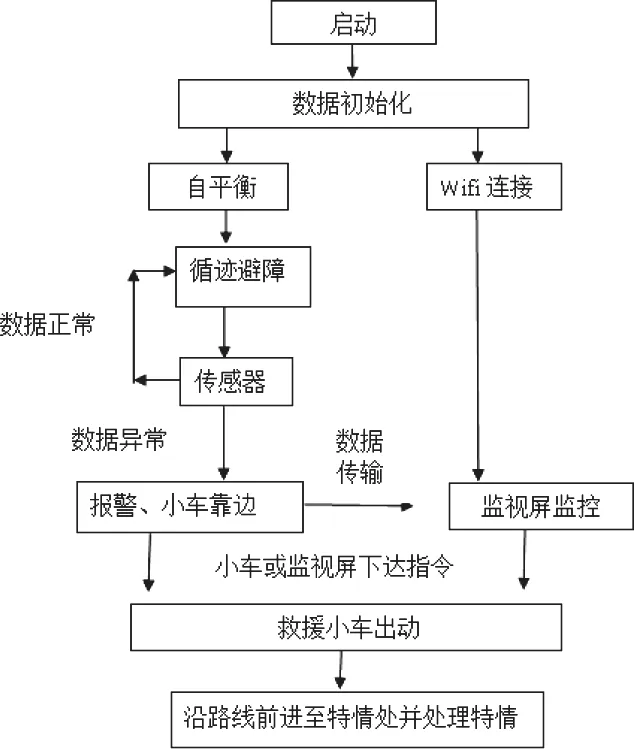
图5 软件流程图
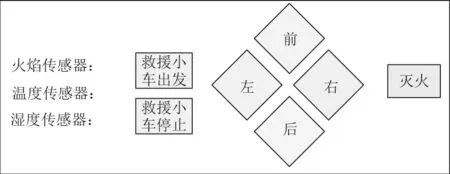
图6 手机APP页面布局
猜你喜欢
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
故事大王(2017年4期)2017-05-08
河南科技(2016年8期)2016-09-03
河南科技(2016年6期)2016-08-13
现代工业经济和信息化(2016年4期)2016-05-17
汽车维护与修理(2016年3期)2016-02-28
浙江共产党员(2014年12期)2014-07-10