一种基于卷积神经网络的智慧路灯联动控制算法
2018-09-22 09:54鄢小虎
照明工程学报 2018年4期
鄢小虎,李 康,陈 凯
(1.湖北大学 计算机与信息工程学院,湖北 武汉 430062;2.国网电力科学研究院,湖北 武汉 430074)
引言
作为智慧城市的信息节点,智慧路灯采用先进的智能控制技术、无线通信技术和电源管理技术,实现路灯的自动化、信息化和智能化。智慧路灯为实现照明管理升级、节能减排以及融合城市公共服务系统提供了方向,因此智慧路灯的建设具有重要意义[1]。
目前,国内外多家单位开发了相应的智慧路灯产品[2-4],如:欧司朗开发的智能方案是将 LED 灯具连接到1个利用光管理软件单独控制的网络,形成1个灯具网。经过计算机的计算和分析,优化软件设置,按照特定时间、空间和环境状况调节灯具状态;华为在CeBIT 2016上发布了多级智能控制照明物联网解决方案,该方案的亮点是可以根据实时状况调整照明,从而提高节能效率;厦门市智联信通物联网科技有限公司提出的智慧城市方案,实现了视频、城市洼地水位、PM2.5、温/湿度、噪音等环境指数实时掌握;上海三思电子工程有限公司以LED路灯为载体,实现了智慧照明、充电桩、智慧安防、无线上网、信息交互、智能感知和4G基站等功能。
但是,目前市场上的智慧路灯各个功能模块之间都是孤立的,模块之间缺少联动,不能充分发挥各个功能模块的作用。当出现异常情况时,不能准确判别,给运维人员的日常工作带来了极大的困难。因此,迫切需要一种多功能联动的智慧路灯控制算法。为了提高联动的准确性,我们提出一种基于卷积神经网络的智慧路灯联动控制算法。
1 卷积神经网络
卷积神经网络[5,6](Convolutional Neural Network,CNN)是一种深度学习的前馈神经网络模型,它包括卷积层(convolutional layer)和池化层(pooling layer)。卷积神经网络可以直接从原始图像中识别物体,通过局域感受野、权值共享和次抽样三个方法来实现识别位移、缩放和扭曲不变性[7]。目前,卷积神经网络已经成为学术界和工程界研究的热点,广泛应用于图像和视频处理等领域[8]。
综合考虑计算速度和识别准确率,本文通过卷积神经网络LeNet-5模型提取拍摄图像的特征,该模型的层数为8,结构可以表示为:输入层—卷积层—池化层—卷积层—池化层—全连接层—全连接层—输出层。卷积层的形式如下:
(1)
其中l代表模型的层数,k代表卷积核,Mj代表第l-1层的第k个特征图,b代表输出图的偏置,f代表激活函数。ReLU函数能很好地传递梯度,经过多层的反向传播后,梯度仍不会大幅缩小,解决了梯度弥散的问题。本文激活函数采用ReLU函数,其数学表达式如下:
f(x)=max(0,x)
(2)
池化层采用最大值操作,通过保留最显著特征,提升模型的畸变容忍能力。
2 基于CNN的物体检测
本文的智慧路灯是集智慧照明、无线网络、视频监控、信息发布、智能充电、微环境监测、一键报警等功能的软硬件综合平台。后台系统能单独管理和控制各个功能模块,例如智慧照明模块能根据不同光照和不同时间自动调节LED灯的亮度,视频监控能实现摄像头水平方向360°连续旋转,信息发布能实现微环境监测数据自动上传和预警。
采用卷积神经网络对视频监测中的物体进行检测,详细的流程见图1。
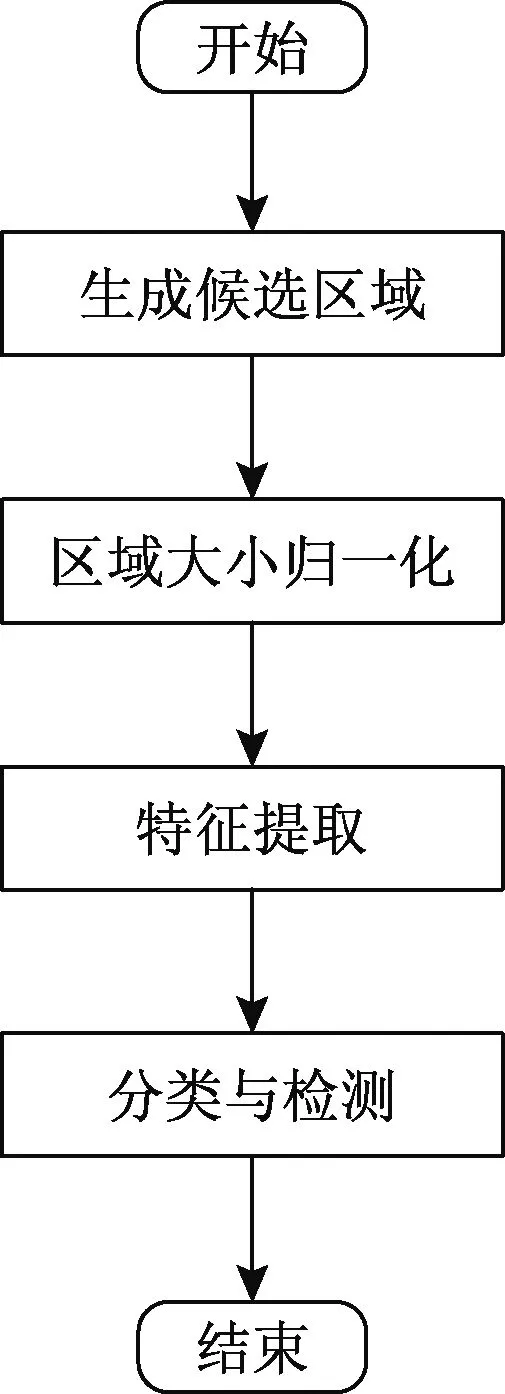
图1 基于CNN的物体检测流程图Fig.1 Flow chart of object detection based on CNN
在智慧路灯附近,采用卷积神经网络对一键报警人和充电车辆进行检测,详细的步骤如下:
步骤1:生成候选区域。通过旋转云台,摄像头在以报警人和充电车辆为圆心,r(r=1.5 m)为半径的圆圈内拍摄图像,产生大量的候选区域。
步骤2:区域大小归一化。把所有侯选框缩放成固定大小,本文采用100×100(单位为像素)的固定区域。
步骤3:特征提取。综合考虑计算速度和识别准确率,通过卷积神经网络LeNet-5模型的卷积层和池化层提取拍摄图像的特征。
步骤4:分类与检测。在特征提取的基础上,采用softmax分类器来识别物体。softmax分类器有三个类别,分别是有报警人状态、有充电车辆状态及没有人车的状态。
3 基于CNN的智慧路灯联动控制算法
本文实现视频监控、智能充电和一键报警多功能的联动。摄像头在智慧路灯附近拍摄图像,将图像缩放成固定大小100×100(单位为像素),输入卷积神经网络进行检测。当出现有人报警时,摄像头通过云台实时检测并跟踪报警人。若有人误报警,运维人员通过后台系统查看现场报警的视频情况,及时排除异常情况,避免无效的救援。
当出现车辆充电时,摄像头通过云台实时检测并跟踪车辆。若充电过程出现异常,运维人员在后台能实时查看,并提供相关的帮助。对于视频中的充电车辆图像,采用卷积神经网络还可以进行车牌、车辆类型、车身颜色和车标等信息识别,实现违法行为的自动化取证,提高取证效率,维护交通秩序和治安管理。
将视频监控、智能充电和一键报警联动的算法安装在后台服务器上,实现多功能的实时联动控制,联动的策略见图2。

图2 基于CNN的智慧路灯联动控制流程图Fig.2 Flow chart of intelligent street lamp linkage control based on CNN
在摄像的图像范围内检测到报警人时,视频监控与一键报警功能联动;在摄像的图像范围内检测到充电车辆时,视频监控与智能充电功能联动。当同时检测到报警人和车辆充电时,摄像头优先与一键报警功能进行联动,当检测到报警人离开后,再与智能充电的功能进行联动,详细的联动步骤如下:
步骤1:监控智慧路灯周围。在智慧路灯周围,摄像头将焦点对准固定位置进行监控,本文在东南西北方向共设置固定的八个点,摄像头每天在这八个点上轮回进行监控,这些点包括报警位置和充电车位。
步骤2:判断是否有人报警。若有,则转步骤3;否则,转步骤1,摄像头按固定的模式继续监控智慧路灯周围的情况。
步骤3:监控报警人。当有行人报警时,报警信号传到后台,采用卷积神经网络对行人按报警器的状态进行检测。摄像头在以报警位置为圆心,r为半径(r=1.5 m)的圆圈内检测。若检测到报警人,则摄像头自动调整角度,监控报警人。当报警人离开检测区域后,转步骤1。
步骤4:判断是否有车辆充电。若有,则转步骤5;否则,转步骤1,摄像头按固定的模式继续监控智慧路灯周围的情况。
步骤5:监控充电车辆。当有车辆充电时,充电信号传到后台,采用卷积神经网络对车辆充电的状态进行检测。摄像头在以充电车位为圆心,r为半径(r=1.5 m)的圆圈内检测。若检测到充电车辆,则摄像头自动调整角度,对准充电车辆,监控充电车辆。当充电车辆离开检测区域后,转步骤1。
4 实验结果及分析
为了验证本文方法的有效性和可行性,通过现场模拟一键报警和充电桩功能,产生训练样本。为了更好地比较和验证算法性能,产生3 000张训练图像和1 000张测试图像。在训练图像中,出现报警人的图像1 000张,出现充电车辆的图像1 000张,两者都不存在的图像1 000张。采用服务器对算法进行训练和测试,服务器的配置如下:CPU:Intel(R) Xeon(R) E7-4830 2.13 GHz,共有4个处理器;内存:64 G;软件环境:Matlab 2017a。
采用卷积神经网络和BP神经网络对收集的图像进行训练和测试,两种方法的结果比较见表1。在LeNet-5卷积神经网络中,学习速率设置为0.1,批次大小设置为20。BP网络有一个隐含层,该层的神经元为100个,允许误差为0.01。

表1 两种方法的比较结果
由表1可知,本文采用的方法运行时间短,准确率高,更加适合智慧路灯多功能的联动控制。当有500个训练样本时,卷积神经网络的识别准确率为86.2%;当有1 000个训练样本时,卷积神经网络的识别准确率为90.6%。由此可知,随着样本量的增加,算法的准确性也在增大。为了增大样本的容量,提高算法的鲁棒性,对试运行阶段的样本进行人工确认后,重新作为训练样本。当算法的识别准确率大于90%时,能满足智慧路灯现场联动的效果,因此本文将卷积神经网络应用的条件设置为样本量大于1 000。
5 总结
我们提出了一种基于卷积神经网络的智慧路灯联动控制算法,实现了视频监控、智能充电和一键报警联动多功能的联动。采用卷积神经网络对报警人和充电车辆进行检测,提高了联动的准确率。通过智慧路灯各个功能之间的联动发挥了各个功能模块的作用,极大地方便了运维人员的日常工作。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
铁道通信信号(2018年5期)2018-06-28
小学阅读指南·低年级版(2017年11期)2017-12-06
小学阅读指南·低年级版(2016年1期)2016-09-10
汽车维护与修理(2016年10期)2016-07-10
小学生·多元智能大王(2015年3期)2015-05-25
汽车维修与保养(2015年8期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28
网络与信息(2009年8期)2009-05-10