
一种舰船声场监测系统的设计方法∗
2018-09-27 01:24肖大为郑武杰
舰船电子工程 2018年9期
肖大为 李 挺 郑武杰
(1.海军工程大学兵器工程学院 武汉 430033)(2.中国人民解放军92819部队 大连 116041)
1 引言
舰船在水中航行过程中,舰船的主、辅机工作产生机械噪声,螺旋桨空化噪声,船体运动产生振动噪声以及船体与海水摩擦产生水动力噪声,这些噪声会向水中辐射产生舰船噪声场[1~2]。我国具有广阔的海域,需要在某些重点海域监测别国舰船通过的情况,并采集这些舰船的声场信号特征,针对这一需要,本文设计了一种舰船声场监测系统。
2 总体结构
舰船物理场水池测量系统主要由水听器、信号调理电路、数据采集储存电路、水密通信电缆和通信浮标组成。水听器接收舰船声场,信号调理电路对水听器接收到的信号进行放大和滤波处理,数据采集储存电路的FPGA器件控制A∕D模数转换器和SD数据储存卡进行声场数据采集和存储,利用水密通信电缆和通信浮标还可将采集到舰船声场特征信息实时传输到海上监测量船或者陆地上的监测中心。舰船声场监测系统组成结构如图1所示。

图1 舰船声场监测系统组成图
舰船声场监测系统的工作状态如图2所示。水听器安装在水密仪器舱内壳体上,水密仪器舱内部安装信号调理电路、数据采集储存电路和RS485通信器件等电路模块。水密仪器舱和通信浮标之间采用水密电缆连接。

图2 舰船声场监控系统工作示意图
3 分系统设计
3.1 信号调理电路
声信号调理电路先对水听器接收到的小信号进行放大,然后输出给后面的带通滤波电路进行滤波处理,提高信号信噪比。信号调理电路组成如图3所示。

图3 信号调理电路组成图
综合考虑功耗和噪声的要求,滤波器电路设计采用凌特公司生产的LT1884型运算放大器,其工作电流最大为1mA,该放大器可以在电源电压为2.7V和36V之间任何功率下工作,高精度轨到轨输入输出。
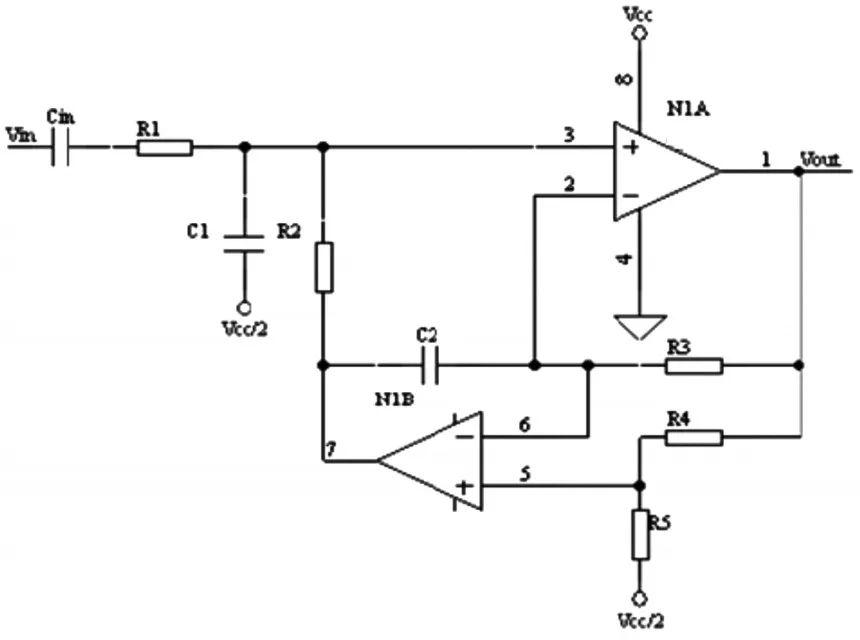
图4 带通滤波器二阶节电路原理图
图4为采用LT1884型运算放大器实现的二阶节带通滤波电路,其对滤波拐点频率有非常强的控制能力,可作为构成带通滤波器的基本二阶节[3]。将三个二阶节滤波电路级联起来,就构成了信号预调理所需的6阶带通滤波器,完成对声信号的预处理,提高数据采集的信噪比[4~5]。
3.2 采集储存电路
采集存储电路采集并记录舰船声场数据,其主要由A∕D模数转换器、FPGA、ARM和SD数据储存卡组成,采集电路组成如图5所示。FPGA器件控制A∕D模数转换器和SD数据储存卡进行声场数据采集和存储,ARM器件用来进行存储文件管理和对外数据通信[6~7]。采集存储电路组成如图5所示。

图5 采集储存电路组成图
A∕D模数转换器选择美国AD公司生产的AD7671型芯片,该芯片单+5 V供电,采样精度16位,采样速率800KSPS(正常模式),最大功耗仅为112mW,适合在采用电池供电的监测系统上应用。FPGA选用的XILINX公司最新出品的SPAR⁃TAN-6系列的XC6SLX9芯片,其拥有144个管脚,接近100个可用管脚,含4个时钟倍频器。
FPGA与A∕D芯片的电气连接如图6所示。FPGA为A∕D芯片提供同步时钟信号,其使用了20MHZ的外部晶振,经过分频后通过SCLK管脚输出给A∕D芯片[8]。系统工作时,FPGA促发A∕D芯片的CNVST管脚使其开始数据采样,A∕D芯片数据采样完成之后其BUSY管脚由高电平变为低电平,FPGA检到BUSY管脚的低电平信号,通过控制CS信号对AD芯片采样到的数据进行读取,数据由SDOUT管脚串行输出[9~10]。
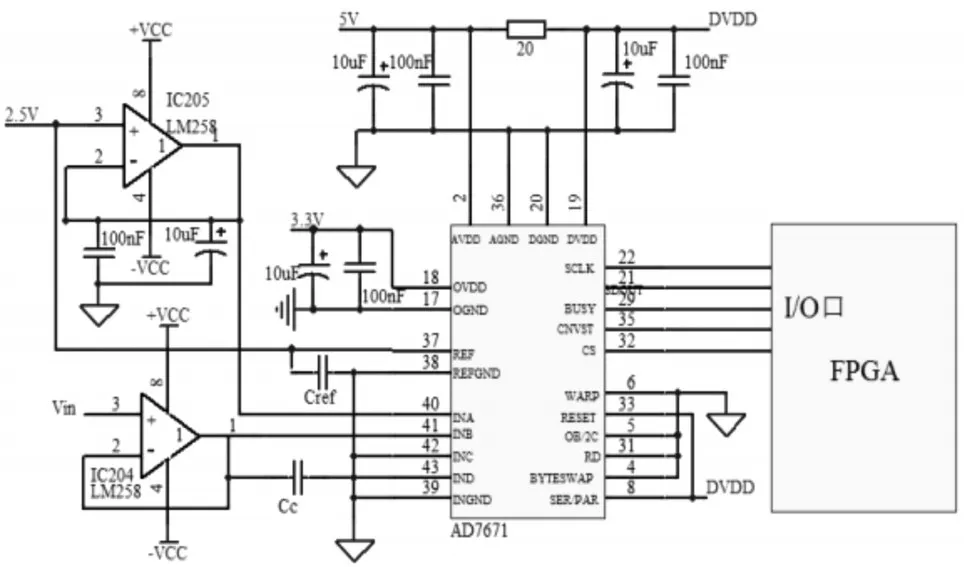
图6 FPGA与A∕D的电路原理
3.3 数据通信模块
数据通信模块主要由RS485数据通信电路、水密通信电缆和通信浮标组成。RS485通信电路接收数据采集电路输出的舰船声场特征信息,然后将这些信息以差分形式通过水密通信电缆传送到通信浮标。通信浮标接收到信息后,通过北斗卫星系统将信息传输到海上的监测船或者陆地上的监控中心。数据通信模块组成如图7所示。

图7 数据通信模块组成图
通信浮标主要由浮球、系索、定位锚、北斗天线、浮体、电子舱等组成。通信浮标组成结构如图8所示,其中,浮球、系索和定位锚用于固定通信浮标在水中的位置,电子舱内装有北斗通信发射终端机,通信接口和电池等。
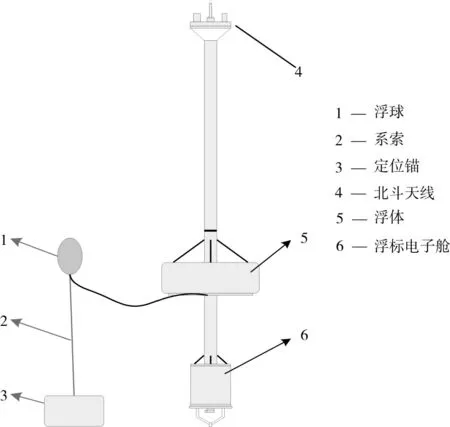
图8 通信浮标组成图
通信浮标的核心器件是北斗通信发射机。北斗卫星导航定位系统是我国自主研制开发的区域性有源三维卫星定位通讯系统,是继美国的全球定位系统(GPS)、俄罗斯的GLONASS之后第三个成熟的卫星导航系统,其突出特点是卫星数目少,用户终端设备简单,能够满足对服务区提供定位、导航、授时以及简短报文通信服务[11~12]。
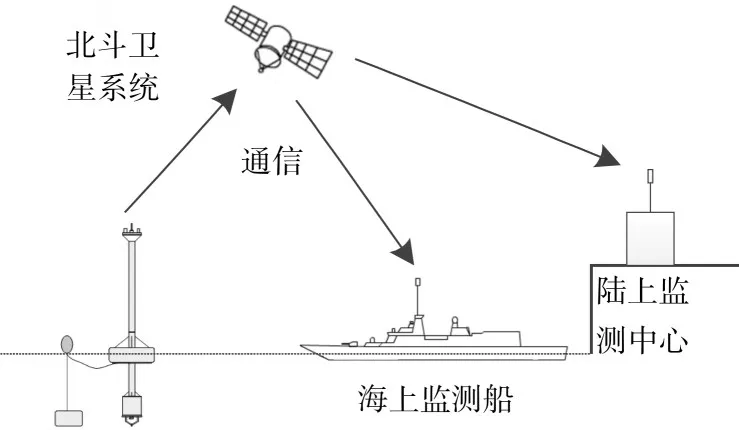
图9 通信浮标与北斗通信示意图
通信浮标与北斗卫星、海上监测船和陆上监测中心之间的数据传输路径如图9所示。利用北斗系统的报文通信功能,浮标电子舱内的北斗发射机终端机将舰船特征信息先发射给北斗卫星系统,卫星系统再将舰船特征信息转发给装有相应北斗接收终端机的海上监测船和陆上监测中心,完成对某一海域通过舰船的监测任务。
舰船声场监测系统采用西安中星伟业通信科技有限公司生产的ZXFB型北斗卫星终端机。ZXFB型北斗卫星终端机融合了北斗一代有源通信和北斗二代B1无源定位的功能,该产品可以适用高盐雾、高腐蚀海上环境,具有集成度高、功耗低、尺寸小的特点,非常适合在通信浮标上使用。
4 测量数据
舰船声场监测系统海试时成功测量并记录到某一舰船通过时的声场数据,如图10和图11所示,图10为舰船声场的时域波形,图11为舰船声场的频谱特性。

图10 测量到的舰船声场时域波形
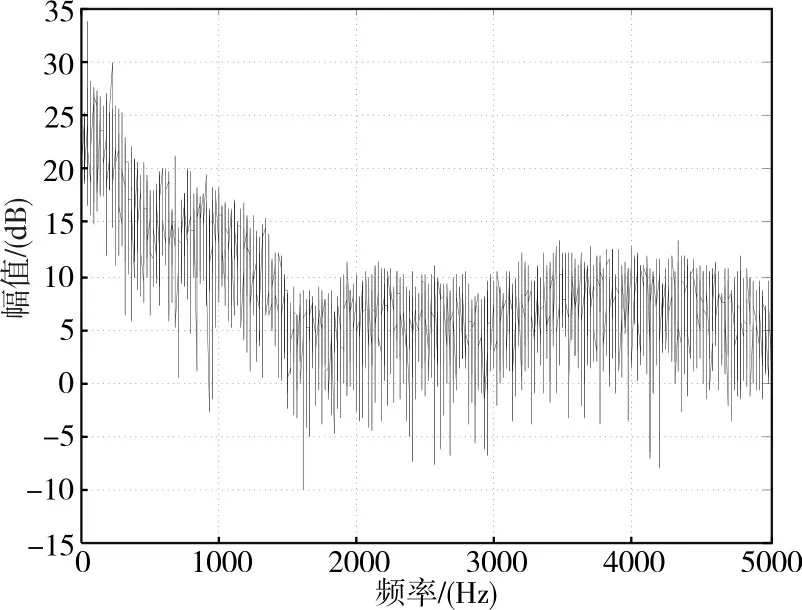
图11 测量到的舰船声场的频谱特性
5 结语
本文设计了一种舰船声场监测系统,该实验系统可测量储存舰船通过时的声场信号,并利用北斗卫星导航定位系统的报文通信功能实时报送舰船通过时的特征信息,可完成监测某些重点海域舰船通过情况的任务。
猜你喜欢
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
电子制作(2021年21期)2021-11-10
兵工学报(2021年4期)2021-06-19
舰船电子工程(2021年5期)2021-06-04
家庭影院技术(2020年6期)2020-07-27
垂钓(2019年2期)2019-09-10
计算机与数字工程(2019年4期)2019-05-07
现代职业教育·中职中专(2017年2期)2017-08-13
艺术科技(2016年11期)2017-05-05
