
弱电网情况下双馈风电机组改进虚拟感抗控制方法
2018-09-27 05:19张学广赵旖旎徐殿国
电力系统自动化 2018年18期
张学广, 方 冉, 马 彦, 赵旖旎, 徐殿国
(1. 哈尔滨工业大学电气工程与自动化学院, 黑龙江省哈尔滨市 150001;2. 中国空间技术研究院通信卫星事业部, 北京市 100084)
0 引言
双馈风电机组作为目前使用最为广泛的风电机组类型,其并网稳定性问题不容忽视。风电场一般处于交流电网末端,从风电机组侧看,电网呈现出弱电网特性。弱电网是指电网阻抗较大,电网阻抗影响不能忽略的非理想电网。研究及现场运行情况表明,双馈风电机组在弱电网连接条件下可能会出现功率振荡甚至失稳情况,因此有必要针对双馈风电机组在弱电网情况下的运行控制展开研究[1]。
针对弱电网情况下双馈风电机组存在的不稳定现象,可以通过适当调整控制器的参数或改变系统的运行状态来提高系统的稳定性[2]。但是由于实际系统对于控制器动态特性和系统运行状态的要求,仅通过调节控制器参数或改变系统运行状态来改善系统稳定性的作用有限,因此有必要通过调整控制器结构来改善系统的稳定性。然而目前改变双馈风电机组控制器结构的方法大多用于改善机组的动态特性,或应用于电网故障情况下的故障穿越控制[3-4]。针对弱电网下风电机组并网稳定性问题的研究则集中在提高并网逆变器对弱电网的适应能力上[5-6],对转子侧控制方法的研究还较少。文献[7-8]针对弱电网条件下运行的双馈风电机组,提出了虚拟同步控制策略,有效地提高了系统在弱电网情况下的功率传输能力和运行稳定性。但是虚拟同步控制的方法仍有很多问题没有解决,例如在不同风力条件下具有自适应调节能力的有功功率控制器的设计以及风电场中风机之间的相互影响问题。
目前,针对双馈风电机组并网稳定性分析的建模方法可以分为状态空间模型法[9]和阻抗模型法,相对来说,阻抗模型法可以直观地体现系统各变量的逻辑关系[10-12]。其思想是将电源和负载等效成为频率域的输入输出阻抗(或导纳),对电网来说,双馈风电机组可以等效为可控电流源,由于双馈风电机组等效输入导纳的存在,负载阻抗的变化会对双馈风电机组的稳定运行造成影响[13-14],因此改善双馈风电机组的阻抗特性是提高弱电网情况下系统稳定性的有效解决方案。在控制器中引入虚拟阻抗来改变系统阻抗特性,提高系统稳定性的方法具有无须投入额外装置、实现方便、经济性好等优点,在提高双馈风电机组在弱电网条件下的稳定性以及故障穿越能力等领域上被广泛应用。例如文献[15-16]中分别通过在并网逆变器和转子侧电流控制器中引入虚拟阻抗,提高双馈风电机组在弱电网条件下的适应能力。文献[17]通过在转子侧电流控制器中引入虚拟电感实现暂态自灭磁控制,扩展了可穿越的低压故障范围。文献[18-20]在转子侧电流控制器中引入虚拟阻抗,提高了双馈风电机组在电网电压骤升故障下的穿越能力。但以上文献中在引入虚拟阻抗时均未考虑锁相环的影响,而锁相环直接决定电网电压扰动和双馈电机控制系统之间的耦合程度,在本文的分析中,弱电网情况下锁相环动态的影响可能会导致传统虚拟阻抗方法的失效。
本文首先在同步旋转坐标系下给出了双馈风电机组的等效输入导纳模型,并采用广义奈奎斯特稳定判据分析系统运行稳定性。在此基础上,本文采取在转子侧控制器引入虚拟感抗的方法,提高系统稳定性。在弱电网情况下,锁相环动态的存在可能会导致传统的虚拟感抗方法失效。因此,本文在考虑了锁相环动态的影响后,提出了一种改进的基于虚拟感抗的控制方法。最后通过在MATLAB/Simulink中搭建1.5 MW 双馈风电机组详细模型,利用仿真实验验证了所提方法的有效性。
1 双馈风电机组输入导纳建模
双馈风电机组结构框图如图1所示。图中:PI表示比例—积分;SVPWM表示空间矢量脉宽调制;DFIG表示双馈感应发电机。
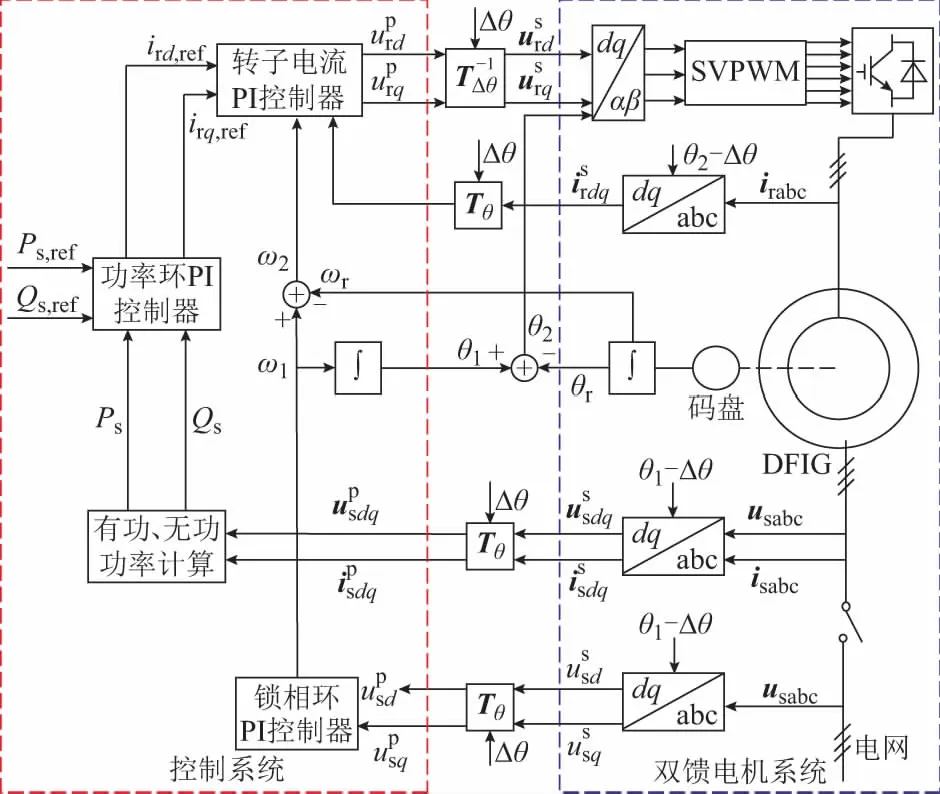
图1 双馈风电机组结构框图Fig.1 Structure diagram of DFIG based wind turbine
在建立双馈风电机组的等效输入导纳模型时需要考虑双馈电机主电路本身的固有导纳和由控制系统引入的等效导纳两部分,其中控制系统主要考虑锁相环、电流环和功率环三部分的影响。为了得到双馈风电机组的输入导纳模型,需要在其静态工作点处做小信号扰动线性化处理,因此选择在同步旋转坐标系下进行建模分析,此时所建立的双馈风电机组输入导纳模型可以表示为二阶矩阵的形式:
(1)
式中:Ydfig为双馈风电机组的等效输入导纳矩阵;Ydd,Ydq,Yqd,Yqq分别为Ydfig的dd,dq,qd,qq轴分量。
双馈风电机组的等效输入导纳模型推导在文献[10]中有详细介绍,但是在该文献中并未考虑转子侧功率外环的影响,本文将会把转子侧功率外环引入等效输入导纳模型中,使所建立的等效导纳模型更加符合实际。
1.1 不考虑功率外环时的输入导纳建模
不考虑转子侧功率外环的等效导纳建模在文献[10]中已经有详细推导,本文只简要介绍。从并网点向双馈电机侧看,为获得双馈电机的导纳模型,需得到定子电流关于定子电压的表达式。因此不考虑控制器影响时,以定转子电压为输入变量,以定子电流为输出变量,双馈电机开环导纳框图如附录A图A1所示。
Yog=GsrGirs+Giss
(2)
其中
式中:Ls和Lm分别为电机定转子电感和互感;Rs为定子电阻;ω为同步转速;s为拉普拉斯算子;a,b,c,d,k,k1为与电机参数有关的临时变量,它们的表达式在附录A中给出。
双馈电机的电流环实现有功电流和励磁电流的解耦控制,其输入为转子电流参考值,输出为转子电压给定,dq坐标系下,双馈电机转子电流环控制器矩阵形式的小信号模型可以表示如下:

(3)
其中
式中:Gci为电流环PI控制器引入的传递函数矩阵;Gd1和Gd2分别为转子和定子电流解耦项引入的传递函数矩阵;Lr为转子侧电感;ω2为转子电流角频率;kp1和ki1分别为电流环PI控制器的比例和积分系数;上标~表示相应物理量的小信号量,下同。
锁相环是目前三相交流系统中普遍采用的电网相位检测方法,在物理意义上可以理解为实际电网相角信息和控制系统中所采用相角信息之间的接口,在图1中有直观的体现。双馈风电机组控制系统内部的坐标变换,机组输出有功、无功功率都以锁相环输出的相角信息为准。锁相环的影响表现为当并网点电压出现扰动时,通过锁相环获取的电网相角信息与实际电网相角会存在偏差,双馈电机控制系统采用锁相环输出相角对定子电压和定转子电流进行坐标变换,经过控制器后输出为含有扰动量的转子电压,当此输出电压作用在电机转子上时,实际系统定转子电流最终因此发生扰动,即并网点电压处的扰动会通过锁相环引入系统各个变量中。
为了分析锁相环的影响,需要引入两个同步坐标系,分别为锁相环dq坐标系和系统dq坐标系。系统dq坐标系表示采用实际电网电压相角进行坐标变换得到的坐标系,而锁相环dq坐标系通过采用锁相环输出相角进行坐标变换得到,两者的夹角为Δθ。上标s表示系统dq坐标系下变量,上标p表示锁相环dq坐标系下变量。稳态时,Δθ等于零,两个坐标系重合;考虑锁相环动态时,则Δθ不再等于零,即锁相环dq坐标系是由系统dq坐标系旋转一个角度Δθ得到[11]。两个坐标系中的变量之间的关系如下:

(4)
式中:TΔθ为坐标变换矩阵。
对式(4)做小信号线性化处理,得到两个坐标系下的小信号量间关系为:
(5)
(6)


(7)
由转子侧电流环控制器和锁相环所引入的等效输入导纳可以表达为:
Yc=G2(G1+GsrGirs+Giss)
(8)
其中
所以考虑转子侧电流环控制器和锁相环的双馈风电机组等效输入导纳为:
Yl,cu,pll=Yog+Yc
(9)
1.2 综合考虑电流环、锁相环和功率环时的导纳建模
双馈电机功率环输入为有功功率给定和无功功率给定,输出量为转子电流内环给定,具体控制策略在dq坐标系下表示如下:
(10)
式中:ird,ref和irq,ref分别为功率环输出的转子电流给定值的d轴分量和q轴分量;kp3和ki3分别为功率环比例系数和积分系数;Ps,ref和Qs,ref分别为有功和无功功率给定。
根据式(10),功率外环控制器可以表达为如下矩阵形式:
(11)
其中
双馈电机输出的有功和无功功率通过下式计算:
(12)
对式(12)进行小信号线性化处理得到:
(13)
其中
在综合考虑了电流环、锁相环和功率环的影响后,双馈风电机组的等效输入导纳传递函数框图如图2所示。
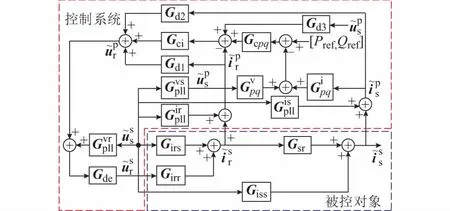
图2 综合考虑电流环、锁相环和功率环的双馈电机输入导纳框图Fig.2 Equivalent admittance diagram of DFIG considering current controller, phase-locked loop and power controller
图2中Gde为控制器带来的延时,设Td为控制器延时时间。则Gde具体表达式为:
(14)
根据图2,可以推导出完整的双馈风电机组等效输入导纳表达式为:

(15)
其中
式中:E为二阶单位矩阵。
为了分析引入的转子侧功率外环对双馈风电机组等效输入导纳模型的影响,根据式(8)和式(15)分别绘制不加功率外环和引入功率外环的双馈风电机组等效输入导纳的波特图如附录A图A2所示,图中从左至右,从上至下依次为导纳分量Ydd,Ydq,Yqd,Yqq。从附录A图A2的波特图对比可以看出,在模型中加上转子侧功率外环主要对双馈风电机组等效导纳的低频段产生了较大的影响,如大大增加了Ydd在低频段表现为负电阻特征时幅值。此外,在引入了转子侧功率外环后,Yqq在高于工频的频率范围内也表现为负电阻特征。在功率环比例系数变化时,双馈风电机组等效输入导纳波特图如附录A图A3所示,从图中可以看出,随着功率环比例系数的增大,最明显的变化是等效导纳的Yqq分量表现为负电阻特征的频率范围在增大,当比例系数增大为2.0时,Yqq在除50 Hz附近的频段以外全部呈现负电阻特征。
2 基于广义奈奎斯特方法的稳定性分析
奈奎斯特稳定判据是分析反馈控制系统稳定性的重要方法,但其只适用于单输入单输出系统。MacFarlane在1970年将其推广到多变量的情形中,提出了针对多变量控制系统的广义奈奎斯特稳定判据。针对本文所研究的弱电网条件下的双馈发电系统,在dq坐标系下得到的系统阻抗模型如附录B图B1所示。模型中双馈风电机组被等效为理想电流源并联等效阻抗,Idfig为电流源电流,Zdfig为双馈风电机组的等效输入阻抗,其值等于式(15)中Ydfig的逆。电网等效为理想电压源串联等效网络阻抗,Vg为电压源电压,Zg为电网阻抗矩阵。因此在并网点看,发电系统输出端口电流可以表示为:
Is(s)=(E+Ydfig(s)Zg(s))-1(Idfig(s)-
Ydfig(s)Vg(s))
(16)
根据广义奈奎斯特判据,双馈风电机组和弱电网之间的稳定性可以通过判断式(17)定义的回比矩阵L(s)是否满足广义奈奎斯特判据来分析。即做出L(s)的所有特征值随s变化的曲线,通过观察它们是否包围点(-1,j0)来判断系统是否稳定[13-14]。
L(s)=Ydfig(s)Zg(s)
(17)
其中
(18)
式中:Rg和Lg分别为电网电阻和电抗。根据该并网系统的阻抗模型,只要代入一组实际的电机和电网参数,就能做出系统的奈奎斯特图并判断系统的稳定性。
本文所用的系统参数和控制器参数分别在附录B表B1和表B2中给出。根据该套参数做出的系统奈奎斯特图如附录B图B2所示,在图中实线和虚线分别对应回比矩阵两个特征值的奈奎斯特曲线,点横线标出的单位圆有助于更好地观察系统稳定性。通过判断奈奎斯特图是否环绕(-1,j0)点即可预测系统的稳定性。在表B1和表B2的系统参数条件下,系统恰好处于临界稳定状态。
3 基于虚拟感抗的控制器设计
3.1 转子侧电感对系统稳定性影响分析
通过建模得到的双馈风电机组等效输入导纳与电机的定转子电阻、漏感以及定转子间的互感有关,因此电机参数直接影响电机运行的稳定性。通过广义奈奎斯特稳定判据可以研究电机转子侧电感大小对运行稳定性的影响。设附录B表B2中双馈电机转子侧电感为Lr,在分析时保持其他参数不变,改变双馈电机的转子侧电感为Lr2,得到不同转子电感大小时的系统奈奎斯特图如附录B图B3所示。
通过图B2和图B3可以看出,在转子侧电感不断增大的过程中,红色的奈奎斯特曲线从包围(-1, j0)点逐渐到经过该点,再到不包围并远离该点。根据广义奈奎斯特判据,系统逐渐从不稳定状态过渡到临界稳定状态,并且随着转子电感的继续增大,变得稳定。因此,弱电网情况下双馈风电机组的稳定性随着转子侧电感参数的增大而变好。但是实际的电机在制作完成后转子电感就已经固定,且考虑电机的整体性能,对转子电感的大小会有约束。通过增大实际电机的转子电感来提高双馈风电机组的稳定性难以实现。
3.2 基于虚拟感抗的电流环控制器
在阻抗模型中,双馈风电机组对于电网可以等效为可控电流源,其等效输入导纳越小,则在负载变化时的抗干扰能力越强,因此增大双馈电机的转子侧电感相当于减小了等效输入导纳,增强了双馈风电机组在弱电网条件下运行的稳定性。在双馈电机的T形等效电路中,可改变的电感有三个部分:定子漏感、转子漏感和定转子互感。由于定转子互感通常比转子漏感大一个数量级,从定子侧看定转子互感的变化对于整个系统等效导纳的影响极为有限。因此考虑在定子漏感回路和转子漏感回路串联电感来调整双馈电机的等效导纳。前文已经分析了增大双馈电机转子侧的电感值可以有效提高系统在弱电网条件下的稳定性。同时考虑到双馈电机的双闭环控制中的内环即为转子电流环,与转子漏感回路直接相关,通过在控制回路中增加一个虚拟电感Lvir与转子漏感Llr串联来减小双馈电机的等效输入导纳的方法具有简便性。
在转子侧串入虚拟电感后,控制器和被控对象均发生变化,而实际电机的转子电感无法改变,因而需要重新设计控制器,通过改变控制器达到等效改变电机转子电感的目的。重新设计控制器控制框图如附录B图B4所示,引入虚拟电感后的控制器相当于在原来的电流环控制器的基础上增加了转子电流微分反馈[17],其表达式如下:
(19)
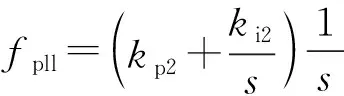
将式(19)所表示的控制器代替传统的电流环控制器用于输入导纳建模中,采用附录B表B1和表B2所用的参数,得到的系统奈奎斯特图如图3所示。
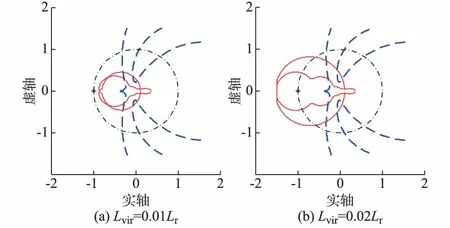
图3 未考虑锁相环影响引入虚拟感抗后系统奈奎斯特图Fig.3 Nyquist plots of DFIG after introducing virtual inductance without considering phase-locked loop dynamics
从图3(a)可以发现,在引入适当的虚拟电感之后,系统稳定性能够得到一定的改善。但是略微增大所加虚拟电感时,如图3(b)所示,系统的稳定性不仅没有得到改善,反而变得更差。这说明略微增大虚拟电感后,引入的虚拟电感对系统稳定性反而起到了负面的作用,这与改进控制器的初衷不相符。传统的引入虚拟感抗方法效果非常有限,且一旦所用虚拟电感值略大,就可能使系统稳定性变差。重新回顾引入虚拟电感的过程,可以发现设计控制器时忽略了虚拟感抗与锁相环之间的关系,并未考虑弱电网条件下虚拟电感反馈的转子电流中耦合了电网电压的扰动。锁相环动态的存在对系统稳定性有着负面影响,因而这种未考虑锁相环动态影响的传统虚拟感抗方法在实际使用中有很大的限制。
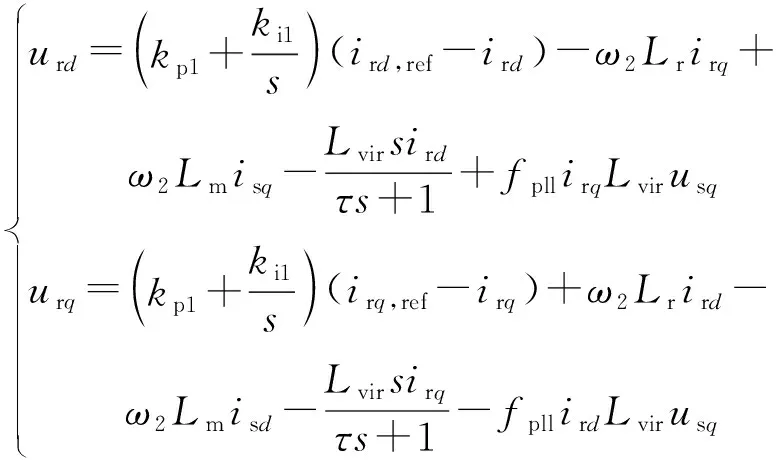
3.3 考虑锁相环影响的改进控制器设计

(20)

(21)
式中:τ为一阶低通滤波器的时间常数。
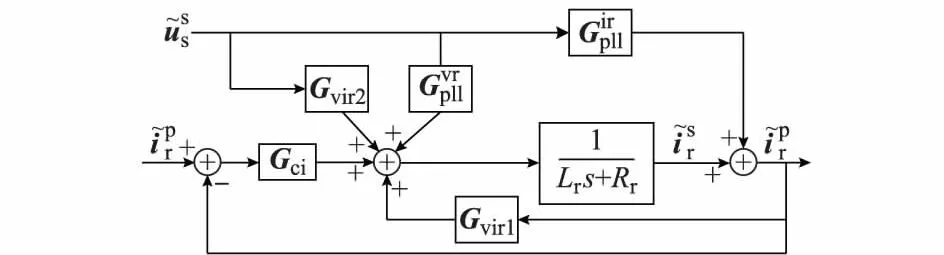
图4 考虑锁相环影响后的改进电流环控制系统框图Fig.4 System diagram of improved current controller considering impact of phase-locked loop
考虑到理想微分项在实际控制系统中难以实现,因此在微分项前加入一阶低通滤波器,同时注意到定子电压q轴分量稳态下为零,根据图4可得到所提出的控制器表达式为:
(22)
(23)
利用式(22)代表的改进控制器代替传统的电流环控制器用于输入导纳建模中,得到奈奎斯特图如图5所示。分析中所用参数与图3均相同,对比图3可以发现,采用所提的改进虚拟感抗控制器后,在引入不同大小的虚拟电感时,奈奎斯特图均不再环绕(-1,j0)点,奈奎斯特曲线相对的更加远离临界稳定点,系统稳定性得到明显改善。并且随着虚拟电感Lvir的增大,系统稳定性不断提高。但是过大的Lvir会影响到控制器的响应速度,同时也会影响到其他控制环,导致系统稳定性开始变差。根据基于广义奈奎斯特图的稳定系分析,并结合仿真实验,为了兼顾提高系统稳定性的效果和系统对动态响应速度的要求,建议合理的虚拟电感取值范围为0.02Lr至0.2Lr。
图5 采用所提改进控制器时的系统奈奎斯特图Fig.5 Nyquist plots of DFIG after applying improved current controller
为了验证传统虚拟感抗控制和本文所提的改进虚拟感抗控制对双馈风电机组的等效输入导纳模型的影响,分别作出了不加虚拟感抗控制、引入传统虚拟感抗控制和引入本文所提的改进虚拟感抗控制后的双馈风电机组等效输入导纳波特图如附录B图B5所示,其中虚拟感抗取值为Lvir=0.1Lr。从图中可以看出,传统虚拟感抗方法和本文所提的改进虚拟感抗控制方法对等效输入导纳模型影响的区别主要体现在等效输入导纳的dq轴分量和qq轴分量上,引入传统虚拟感抗后,Ydq和Yqq表现为负电阻特征的频率范围在增大,而引入本文所提改进虚拟感抗后,Ydq和Yqq表现为负电阻特征的频率范围有所减小。
3.4 虚拟感抗方法的仿真验证
在MATLAB/Simulink平台下搭建了1.5 MW双馈风电机组详细模型进行系统仿真分析,仿真所用的系统参数与附录B表B1相同,在该套系统参数下,电网的短路比为2,因此在仿真中双馈风电机组在弱电网条件下并网运行。在仿真中设置双馈电机工作在单位功率因数状态下,即有功功率的标幺值给定为1,无功功率的标幺值给定为0。通过在仿真中调节不同的控制器参数,使系统在弱电网下失去稳定后加入所提的改进虚拟感抗控制器,验证本文所提改进控制器提高系统稳定性的有效性,仿真中虚拟感抗值选为0.15(标幺值)。
在图6(a)所示的仿真实验中,开始在采用传统电流环情况下,在1 s时刻电流环比例系数发生阶跃,定子电流开始振荡并逐渐发散,系统逐渐失控;而在1.06 s时刻加入所提改进的虚拟感抗控制器后,定子电流振荡衰减,系统逐渐趋于稳定,表明所提控制方案能够有效抑制因电流环比例系数增大而引起的弱电网情况下的双馈风电机组不稳定现象。
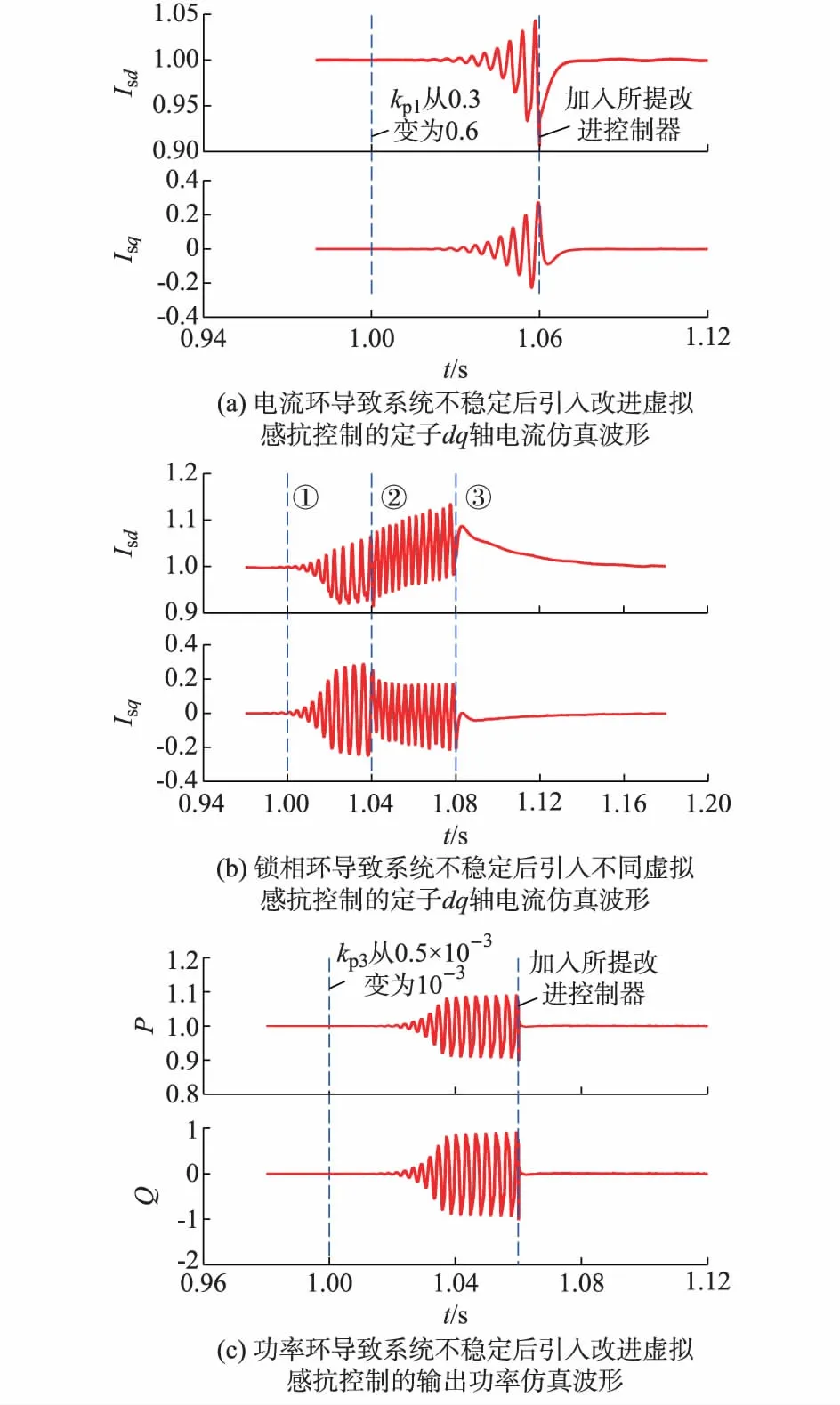
图6 弱电网条件下控制器引起系统振荡后改进虚拟感抗控制仿真波形Fig.6 Simulation waveforms with improved virtual inductance control after system instability caused by different controllers under weak grid condition
为了对比本文所提的改进控制器与传统的不考虑锁相环影响的虚拟感抗方法的效果,在图6(b)所示的仿真试验中,1 s时刻增大锁相环比例系数,定子电流逐渐开始发散,系统变得不稳定,图中:①处kp2从2.5变为3;②处加入传统的虚拟感抗控制器;③处加入本文所提改进控制器。在1.04 s时引入未考虑锁相环动态影响的虚拟感抗控制器,发现虽然系统的振荡幅值有所下降,但是系统依旧处于振荡不稳的状态。在1.08 s时引入本文所提的改进控制器,系统逐渐稳定,证明本文所提控制器能够有效抑制传统虚拟阻抗方法无法起作用的系统振荡,有效提高系统稳定性。
针对功率外环比例系数增大时的情况同样进行了仿真验证,在图6(c)所示的仿真实验中,增大功率外环比例系数后引起了系统输出有功和无功功率的振荡,随后加入所提改进控制器,振荡现象消失,系统输出功率回归稳定;仿真结果表明,所提控制器能够有效提高系统稳定性,对于控制系统与弱电网之间的交互作用而引起的不稳定现象起到明显的抑制作用。
4 结语
本文在同步旋转参考系下建立了综合考虑电流环,锁相环和功率环影响时的双馈风电机组等效输入导纳模型,在此基础上使用广义奈奎斯特稳定判据,可以简单有效地判断弱电网条件下双馈风电机组的稳定性。针对弱电网条件下,双馈风电机组可能存在的不稳定现象,可以通过在转子侧电流环中引入虚拟电感,减小等效输入导纳,增强系统稳定性。与传统的虚拟感抗方法不同的是,本文在设计改进控制器的过程中充分考虑锁相环动态对系统稳定性带来的不利影响,在控制器中引入前馈项消除锁相环耦合弱电网电压扰动带来的影响,使本文所提控制器能够在传统虚拟感抗方法失去作用的情况下仍能有效提高系统稳定性。本文的工作为基于虚拟阻抗的改进控制的研究提供了理论基础,但对于虚拟电感的优化设计以及该控制方法对于系统动态特性的影响仍有待进一步的研究,可以作为后续研究工作的重点。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx)。
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2021年6期)2022-01-17
电子测试(2018年14期)2018-09-26
通信电源技术(2018年5期)2018-08-23
电测与仪表(2017年24期)2017-12-19
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年9期)2015-04-09
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年13期)2014-04-04
