基于航带重叠区的LiDAR强度校正算法研究
2018-10-09 02:23余俊鹏刘定宁
测绘工程 2018年10期
丁 琼,余俊鹏,刘定宁
(广东工业大学 土木与交通工程学院测绘工程系,广东 广州 510006)
机载LiDAR (Light Detection and Ranging,LiDAR)作为一种全新的空间对地观测技术,能直接、快速地获取研究对象表面大量高精度的三维坐标点,在地形测绘、环境监测、城市建模、快速应急响应等方面有着巨大优势,是近年来蓬勃发展起来的一种新型观测手段和方法,具有相当大的发展潜力。由于机载LiDAR点云的不规则性和光斑的低分辨率导致其在地物边界及属性的精确界定上存在一定困难,需要辅以纹理信息丰富的遥感影像来进行准确判读。实际上,LiDAR系统在获取三维坐标信息的同时,就能记录反射回波的强度信息,只是其噪音过高,一般弃之不用。近些年,随着数据采集质量的提高,强度信息被视为目标识别和分类研究的信息源,并成为新的研究热点[1-2]。
早在2002年,Song利用LiDAR强度信息对地表覆盖进行分类,并肯定了强度信息在目标识别及分类上的重要作用。由此,众多学者展开相关研究,例如独立树(Palenichka et al.)、植被的提取(Han et al. ),冰川的识别(Arnold et al.),道路提取[2],生物量估算(Garcia et al.)等。此后,逐渐向LiDAR强度和多源数据融合的方向发展,如和多光谱遥感影像(Huang et al.)、LiDAR三维信息(Wang et al.; Garcia et al.)进行融合来改善目标探测和分类精度。然而,LiDAR强度信息在传播过程中受到来自大气衰减、传播距离、入射角等因素的影响,导致采集的原始强度数据含有较大误差不能被直接利用,严重影响强度信息的研究和应用。
目前,针对LiDAR强度信息进行校正的方法主要可归为3类:
1)基于理论模型的校正方法。该类方法基于雷达方程揭示了传感器发射信号强度、接收强度以及引起强度值变化的各类因素之间的相互关系(Jelalian)。分别针对雷达方程中引起强度变化的各类参数进行校正以期改善强度信息精度(Coren et al.; Donoghue et al.)。
2)基于经验模型的校正方法。该方法主要是从真实数据及数据处理中出现的问题出发,基于数据建模并根据同类地物反射强度应相等这一原则进行研究(Teo and Wu)。
3)基于已知参照物的校正方法是采用反射率已知的材料来研究各类因素对强度的影响,以期提高强度信息精度。
综上所述,研究者们对LiDAR强度信息进行了系统研究分析,但以上方法大多需手动选择同类地物激光脚点样本或者使用实验室参考标本进行校正,对人工干预依赖较大,极大地降低了数据处理的自动化程度;此外,大范围、多航带数据中的重叠区域拼接差异大等问题尚未得到彻底解决,严重阻碍了其应用与发展。
本文提出一种基于最邻近距离和航带重叠区域的LiDAR强度校正方法,使得用户无需人工干预,就可实现强度自校正以及多航带数据的无缝拼接,旨在改善LiDAR强度信息的精度和可靠性,同时极大地提高了数据处理的自动化程度。
1强度校正方法
本研究所采取的研究方法和技术路线如图1所示。

图1 技术流程
1.1 环境影响校正
雷达方程描述了传感器发射信号强度、接收强度以及引起强度值变化的各类因素之间的相互关系。若假设在同一次数据获取过程中,将与传感器因素相关的影响参数视为常数,那么可以将雷达方程简化为式(1):
(1)
式中,Ir为接收到的强度,It为发射强度,ρ为照射目标反射率,R为激光传播距离,ηatm为大气衰减因子,θ为入射角,C为与传感器相关的常数。
从点云数据中分别提取每个激光脚点的三维坐标、强度信息、传播距离和入射角。基于式(1)中的关系,消除传播距离R、大气衰减ηatm和入射角θ的影响得式(2)。
(2)
式中,大气衰减ηatm=10-2aR/10 000。
在这一步中,将传播距离、大气衰减以及入射角3个参数造成的强度衰减统称为环境影响。
1.2 重叠区同名点自动识别
环境影响校正能对LiDAR强度起到一定改善,但是航带重叠区域仍会有剩余误差未消除,使得航带重叠区不能完全吻合,因此需要选择相邻航带同名激光脚点对作为校正样本完成剩余强度差异的消除。在这里,我们提出一种基于最邻近距离的同名样本自动筛选算法,将相邻航带重叠区的同名点作为参考来校正强度信息,完成剩余强度差异的消除,如图2所示。

图2 最邻近点选取示意图
红点为航带1中的激光脚点,黑点为航带2中的激光脚点。由于激光脚点落点的随机性很难保证相邻航带的脚点刚好落在同一位置,因此,我们设定距离阈值为选择同名样本的约束条件。例如,以红点为圆心,给定距离为半径画圆,圈中离红点最近的点即认定为红点的同名点。基于此原理,即可根据提取出的航带重叠区,自动筛选出大量来自符合条件的同名样本对为校正做准备。
1.3 航带重叠区LiDAR强度差异消除
假设重叠区域的剩余强度差异由于式(1)中的参数不准确造成,因此可将式(1)改进为
IB=IA·ρ·Ra·102bRcoscθ
(3)
式中IB为消除航带间差异后的强度值,IA为第一步消除环境影响后的强度值,a,b,c为需要解算的校正参数。
根据来自同类地物反射强度应一致的原则,基于上一步筛选出的样本对建立如式(4)的方程。
IBi=IBj
(4)
式中i,j分别为相邻航带的序号。
每一对筛选出的样本都可以基于强度一致的原则建立方程(4)。将(3)代入(4)中,利用最小二乘原理解算校正参数a,b,c。
1.4 校正LiDAR强度并实现无缝拼接
将解算出的校正参数a,b,c代回式(2),并应用于所有LiDAR数据中实现重叠区域的强度差异消除。比较航带重叠区域改进情况,完成整个实验区域多条航带的无缝拼接。
2 实验结果与分析
2.1 实验区域
本文实验区域位于山东省东营市黄河三角洲湿地自然保护区境内(图3)。实验数据为由Leica ALS50系统采集的3条LiDAR航带,采集时间为2008-04-16,飞行高度2 400 m,扫描角62.5°,激光脚点间隔约2 m,覆盖面积约70 km2,飞行方向为东西向。该区域是我国最完整、最广阔、最年轻的湿地生态系统,是全国最大的河口三角洲自然保护区。区内生物资源、湿地资源和景观资源十分丰富,具有极大的科研价值和参考意义。

图3 实验区域
2.2 数据处理及结果分析
采用Terrasolid软件对原始数据进行预处理,剔除粗差后,提取所需三维信息和强度信息。图4为由LiDAR三维数据生成的数字高程模型 (Digital Elevation Model,DSM)。
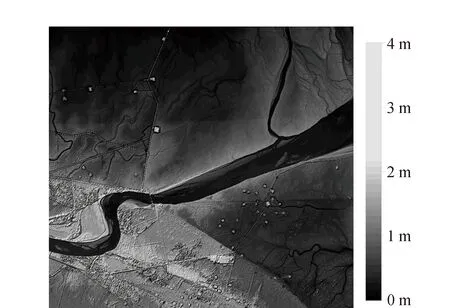
图4 预处理后实验区DSM
由于黄河携带大量泥沙在入海口沉积,形成大面积的浅海滩涂和湿地,实验区域内地势平坦,西侧为覆盖较为丰富的内陆,东侧邻近黄海,河流沿西向东流向入海口。此外,随着输送到河口的泥沙不断增多抬高河床,河床两岸人为加高以防洪。从DSM中可清晰反映出河流两岸高程相对较高。河道两边覆盖人工植被,近海区域为错综覆盖的潮汐带,沟渠走势清晰可见。
数据预处理后,可同时得到原始强度图如图5(a),可见相邻航带拼接处存在明显差异,影响后续分类精度。采取本文提出的算法后,航带拼接处的强度差异有明显改善(图5(b))。为了能更清晰客观地呈现重叠区域强度值精度的改进,沿南北方向提取重叠区的一剖面(图6)。其中,红色和蓝色分别代表来自相邻两个航带的激光脚点,若强度无损失,重叠区强度应完全吻合。然而,由于误差的存在,重叠区强度差异较大。提取该剖面两航带重叠区域强度数据进行统计分析发现,重叠区的强度差异为0.06,方差0.1,改进后分别提高到0.005和0.06,见表1。可见经校正后,由传播距离、入射角和大气衰减造成的强度差异得到极大改善,且表征不同地物的强度变化曲线仍得以保存,为后续分类研究提供基础。

图5 原始强度图和校正后强度图

(横坐标为X,纵坐标为归一化后的强度值)图6 校正前后强度剖面
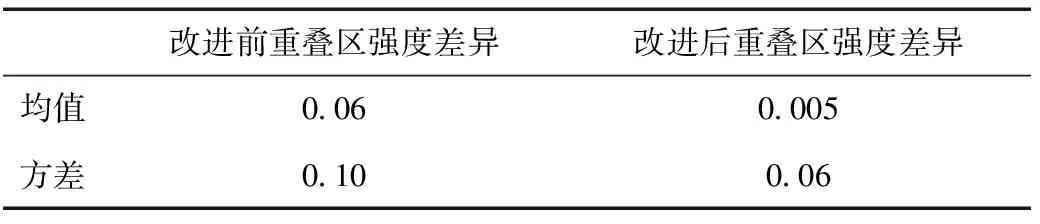
表1 强度改进前后差异对比
3 结 论
本文针对目前LiDAR强度数据质量过低且数据处理自动化程度较低的问题,提出了一种基于最邻近距离和航带重叠区域的校正算法,并采取黄河三角洲湿地的3条LiDAR航带数据进行实验,验证了算法的可靠性。研究结果显示:校正前的强度数据在航带拼接处存在明显差异,导致接缝印迹明显;而经校正之后的强度在航带重叠区能较好地吻合,并较好地保留了不同地物的强度变化曲线,为大区域、多航带数据的无缝拼接提供理论基础。此外,该算法从重叠区域的激光脚点本身出发基于最邻近距离筛选出大量同名样本,摆脱了传统方法人工依赖过高的缺点,极大地提高了数据处理的自动化程度。
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
国学(2020年1期)2020-06-29
小哥白尼(趣味科学)(2019年2期)2019-04-17
小学生导刊(2018年34期)2018-12-18
中国医学影像学杂志(2018年9期)2018-10-17
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
山东青年(2016年3期)2016-02-28