
PWAM控制的Quasi-Z源电机驱动系统
2018-10-10 08:17梁伟华郭明珠葛宝明
电源学报 2018年5期
李 艺,梁伟华,郭明珠,葛宝明
(北京交通大学电气工程学院,北京 100044)
在电机驱动系统中,传统的驱动电路包含两级结构——DC/DC变换器和DC/AC逆变器。系统中的DC/DC变换器置于直流电源和逆变器之间,其作用是提高直流电源的电压。DC/AC逆变器的作用是将直流功率转换为交流功率。传统的驱动电路不仅结构复杂,而且效率较低。然而,quasi-Z源逆变器包含了一个特殊的LC网络。这不仅能使逆变器避免死区时间,而且还能升压。
为了提高逆变器效率,在减小开关损耗方面有很多方法,例如,空间矢量脉宽调制方法[1]、6步操作法[2]和非连续的脉宽调制方法[3]。对于6步操作法来讲,电机会因受较大的损耗和转矩纹波而导致输出波形的质量下降。当使用传统的SPWM方法或SVPWM方法时,系统中6倍频脉波的出现导致直流母线电压有低频谐波。因此,这就需要较大的电容来吸收纹波,从而使得系统体积增大,重量增加[4-5]。
近来,脉冲宽度幅值调制PWAM(pulse-widthamplitude-modulation)方法受到了越来越多的关注[6-9],该想法最初来源于单相PWM控制[10-11]。它应用混合调制方法,通过产6倍频脉波来减小开关损耗,无需较大的电感和电容[12-13]。此外,相对于传统的PWM方法,基于PWAM的电机驱动系统有更高的效率。但是,PWAM从未应用于三相quasi-Z源逆变器中。
本文提出了一个基于三相Quasi-Z源逆变器的PWAM方法,该方法使得系统效率更高,重量更轻;并设计一个1 kW的quasi-Z源电机驱动系统,以验证PWAM调制方法的优点。
1 三相Quasi-Z源逆变器
图1为三相qZSI的拓扑结构。三相quasi-Z源逆变器是在直流输入电压和传统的三相逆变器之间加入了一个特殊的LC网络。这个LC网络包含2个电感 L1和 L2、2个电容 C1和 C2和 1个二极管D1。电容电压vC1和vC2以及直流母线电压vpn分别为

式中,D为直通占空比。

图1 三相qZSI拓扑结构Fig.1 Topology structure of three-phase qZSI
2 PWAM控制
2.1 PWAM的控制原理
目前的交流电动机控制系统多采用传统的空间矢量脉宽调制,该方法具有8个不同的电压空间矢量V0~V7,这些电压矢量将一个复平面分为6个扇区。表1为逆变器输出的电压有效空间矢量和两个零矢量,表中“1”表示开关管导通,“0”表示开关管关断。
空间矢量调制的目的就是通过基本空间矢量的线性组合,使合成电压空间矢量按照设定的参数圆形旋转,即通过空间矢量中相邻的有效矢量及零矢量作用时间,来等效如图2所示电机所需的空间电压矢量Ug。由空间矢量控制算法,根据期望的定子电压空间矢量给定值Ug所处的空间扇区位置,确定准备输出的基本电压空间矢量。对于图2情况而言,选取非零电压矢量V1和V2,记它们各自的作用时间分别为t1和t2,则有

式中,tg为开关周期。一般情况下,t1+t2≤tg,则多余的时间t0被分配在2个零电压矢量V0和V7上,即

与传统的空间矢量调制方法不同,PWAM控制是产生频率为6 ω的电压脉波,其中ω为驱动电机时的基准频率。通过设定理想输出电压vA、vB和vC开始进行PWAM。整个控制周期被分成6个扇区。在不同的扇区内,逆变器开关管有自己特定的开关状态。
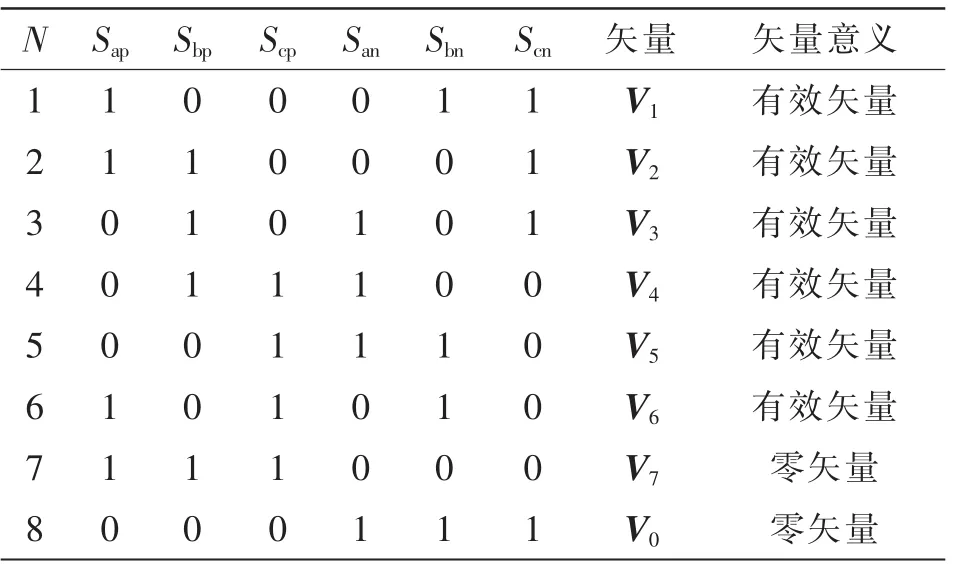
表1 逆变器输出的基本电压空间矢量Tab.1 Basic voltage space vectors output from the inverter

图2 电压空间矢量Fig.2 Voltage space vectors
以第Ⅱ扇区内vA>vB>vC为例,此时等效电路如图3所示。从图3中可以看出,线电压vll(AC)的绝对值等于直流母线电压的平均值,即

式中:Dt(ωt)为直通占空比;Vpn为直流母线峰值电压。直通占空比和直流母线峰值电压之间的关系为

结合式(4)中的直流母线电压Vpn,直通占空比Dt(ωt)还可以表示为

图4为三相qZSI的PWAM方法,其中,S1~S6是开关管的开关信号,m是6个开关管的调制信号,Carrier是所有开关管的载波。直流母线峰值电压随着直通占空比的变化而变化,总体呈现6脉波。在任意一个扇区内,并不是所有的开关管都在频繁开关动作。表2为基于PWAM调制下的6个开关管开关动作,可见,在不同的扇区内,不同桥臂的开关管分别进行PWM开关动作。在每个特定的扇区内,只有一相桥臂的开关管进行PWM开关动作,其他两相桥臂的开关管均保持特定的开关状态,并不是像传统空间矢量调制方法一样所有的开关管均进行PWM的开关动作。当信号1-Dt(ωt)小于等于载波幅值,或信号 Dt(ωt)-1 大于等于载波幅值时,直通信号加入到特定的开关状态中,实现升压功能,总的开关损耗也明显减少。

图3 第Ⅱ扇区内的等效电路Fig.3 Equivalent circuit in the sectorⅡ

图4 三相qZSI的PWAM方法Fig.4 PWAM method for three-phase qZSI

表2 基于PWAM控制的开关动作总结Tab.2 Summary of switching actions based on PWAM control
2.2 与传统方法的比较
纹波出现在最大直通占空比处,此时电感电流为
为了证明PWAM调制方法下qZSI的体积更小,重量更轻,对PWAM和传统PWM两种调制方法下的无源元件进行了对比。
2.2.1 PWAM调制方法下的无源元件
当使用混合调制方法进行控制时,电压的最大

式中,Imax为qZSI输出线电流的幅值。考虑到直流母线峰值电压的最大高频纹波限制在k1Vpn,电容可表示为

式中:Tc为载波周期;Dt为直通占空比的最大值。不仅如此,电流纹波的最大值也出现在直通占空比的最大值处。
电容C1的电压为

如果系统中最大的高频电感脉冲为Δi=k2IL,那么电感为

式中:k2为电感电流纹波系数。1 kW系统的参数为:IL=10 A,Vin=100 V,Vpn=166.7 V,Tc=1×10-4s,Dt=0.2,vC1=133.3 V,k1=35%,k2=27%。
因此,PWAM调制方法下Z源的电容、电感分别为:C=6.86 μF,L=0.5 mH。
2.2.2 传统PWM方法下的无源元件
传统PWM下三相qZSI无源元件的计算可参照文献[14-15],所需的电容为

式中:ε为2倍频电压脉动比。为了满足电感电流纹波需要,电感L1和L2应为

式中,b为电感纹波系数。设计同样的1 kW系统,具体参数为:P=1 000 W,Vpn=373.1 V,f=50 Hz,fc=10 kHz,Dt=0.366,vC1=236.6 V,ε=0.1,iL1=iL2=10 A,b=0.3。
因此,传统PWM调制方法下Z源的电容、电感值分别为C1=C2=115 μF,L1=L2=1.4 mH。由以上结果可以看出,PWAM方法所需的电感和电容要小于传统PWM方法。
2.3 不同调制方法下的效率对比
三相qZSI功率开关的损耗主要包括MOSFET的开关损耗,MOSFET的导通损耗和Z源二极管的反向恢复损耗。下面以开关管S1为例,分析一个周期内开关器件的功率损耗。
2.3.1 PWAM调制方法下的功率损耗
从表2中可以看出,开关管S1在第Ⅰ和第Ⅱ扇区内一直导通,在第Ⅲ和第Ⅵ扇区内进行PWM开关动作,在第Ⅳ和第Ⅴ扇区内进行直通动作。在一个周期内开关管S1的开关损耗为

式中:i(ωt)为逆变器的输出电流;iL(ωt)为流经桥臂的直通电流;tri和tfu为MOSFET的导通时间;tru和tfi为MOSFET的关断时间;VCE为漏极-源极电压;Irr为 反向恢复电流;Qrr为MOSFET反并联二极管的反向恢复电荷;fc为载波频率。除此之外,开关管S1的导通损耗可以计算为

式中:RDSon是MOSFET的导通电阻。二极管D1在直通阶段断开,在非直通阶段关断;D1在非直通阶段一直导通,因此没有反向恢复损耗。由于直通占空比的存在,二极管D1在直通阶段有反向恢复损耗。二极管D1的反向恢复损耗可以计算为

二极管D1的导通损耗为
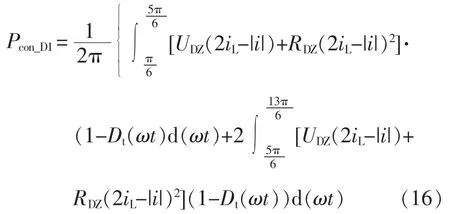
式中:UDZ为二极管D1正向压降;RDZ为二极管D1的导通电阻;Qrr_Z为D1的反向恢复损耗。
2.3.2 传统PWM方法下的功率损耗
文献[14-15]中,在传统PWM方法下,S1的开关损耗为
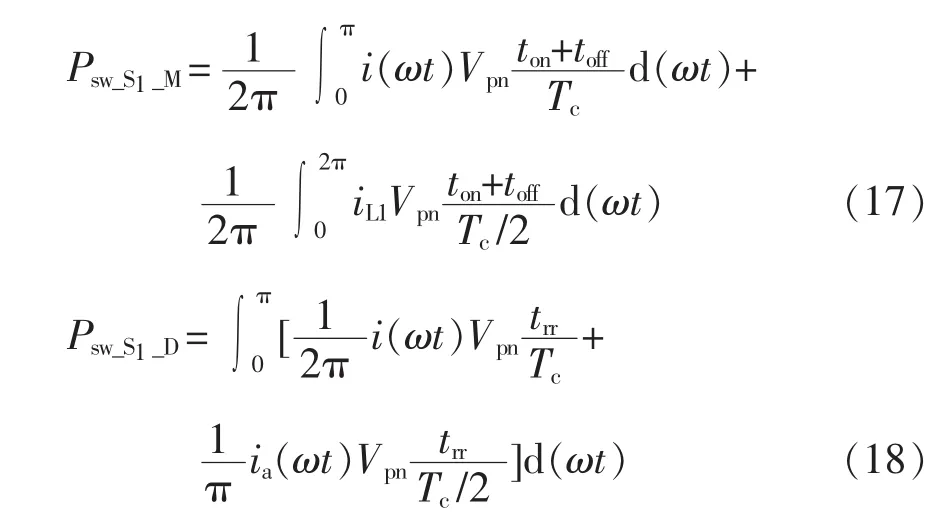
式中:Psw_S1_M是MOSFET的导通损耗;Psw_S1_D是反并联二极管的开关损耗;ton是MOSFET的导通时间;toff是MOSFET的关断时间;trr为反向恢复时间。
传统PWM方法下S1的导通损耗为
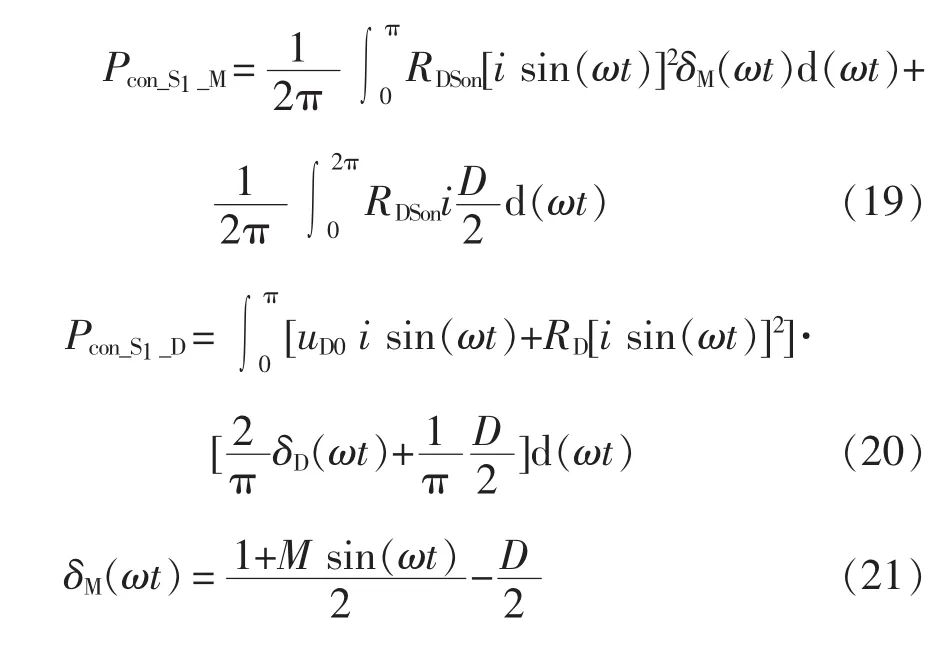

式中:δM(ωt)为 MOSFET 的导通占空比;δD(ωt)为反并联二极管的导通占空比;M为调制系数;RD为二极管的导通电阻;uD0为反并联二极管的导通电压。
Z源开关管的功率损耗为

式中:Psw_D1为开关管的开关损耗;Psw_D1为反并联二极管的导通损耗。
2.3.3 效率对比
基于前文损耗计算,可得两种方法时qZSI的效率对比曲线,如图5所示。系统参数为:Vin=100 V,Vpn=350.4 V,fc=10 kHz,M=0.615,D=0.385。qZSI采用 IXTQ36N30P,参数为:tri=30 ns,tfu=163.5 ns,trr=250 ns,tru=282 ns,tfi=28 ns,Qrr=2 μC,RDSon=110 mΩ,UDZ=0.6 V,RDZ=11 mΩ,Qrr_Z=0.193 μC。
在开关损耗计算中,参数为:ton=30 ns,toff=28 ns,RD=5 mΩ,uD0=0.5 V。
从图5可以看出,PWAM方法能使qZSI具有更高的效率。

图5 PWAM和传统PWM方法下三相qZSI的效率对比Fig.5 Comparison of efficiency of three-phase qZSI between PWAM and the traditional PWM method
2.4 转子磁场定向控制的qZSI永磁同步电机驱动系统
磁场定向控制的qZSI永磁同步电机驱动系统如图6所示。通过比较给定转速和实际反馈转速,转速差送到速度环的PI调节器,得到信号。与此同时,令参考信号为0。通过Clark变换和Park变换,三相定子电流转化为q轴电流iqs和d轴电流ids。然后,d轴电流ids和的差值经过电流环PI调节器得到。q轴电流iqs和经过电流环PI调节器得到。和经过坐标变换后得到三相定子电压uA、uB和uC。根据三相定子电压和直通占空比公式,就可以得到直通占空比,从而进行PWAM调制,控制电机的稳定运行。
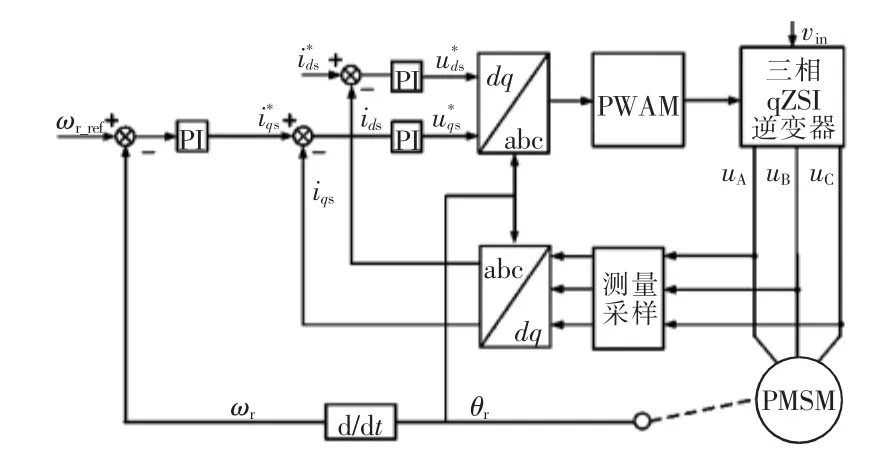
图6 磁场定向控制的永磁同步电机驱动系统Fig.6 Permanent magnetic synchronous motor drive system underfield orientation control
3 仿真结果对比
PWAM和传统PWM下的永磁同步电机驱动系统通过仿真进行对比。两套系统具有相同的电机驱动条件和系统参数下,对比波形包括电机转速、电机转矩、定子电流和Z网络电压、电流、直流母线电压以及逆变器输出电压波形。
仿真中的系统参数为:直流输入电压100 V,开关频率10 kHz。PWAM 下Z源电容6.86 μF,电感0.5 mH,传统PWM下Z源电容115 μF,电感1.4 mH。电机一直以10 N·m的转矩满载运行。
图7为传统PWM下永磁同步电机的转速r、定子电流ia和转矩Tm响应。最初电机稳定运行于1 500 r/min;在0.4 s时转速逐渐下降至0并反向加速后稳定于反向的900 r/min;在0.8 s处转速又反向加速直到在0处稳定。在0.115~0.165 s内,qZSI电容电压vC1和vC2、电感电流iL1和iL2、直流母线电压vpn和输出线电压vab的仿真结果如图8所示。

图7 传统PWM时电机转速r、电流ia和转矩Tm的仿真结果Fig.7 Simulation results of motor’s rotation speed r,current iaand torque Tmunder the traditional PWM
从图8(a)可以看出,传统PWM调制下Z网络中电容电压的波动很大;图8(c)中,直流母线电压波形虽为6脉波,但电压波头的质量差,从仿真结果看有明显谐波,而且直接导致逆变器输出电压波形的谐波含量高。
图9和图10为在相同的电机运行条件下PWAM方法的系统运行结果。
转速r、定子电流ia和转矩Tm如图9所示;在0.115~0.165 s内,qZSI电容电压 vC1和 vC2、 电感电流iL1和iL2、直流母线电压vpn和输出线电压vab的仿真结果如图10所示。从图9可以看出,PWAM控制下的电机能从启动迅速保持稳定运行,转速平稳,定子电流保持良好的正弦度,转矩变化后能迅速回归到给定值。
从图10(a)和(b)可以看出,qZSI电容电压和电感电流不再是恒定值,而是跟随着直通占空比的变化而变化。重要的是,电容电压和电感电流的波动为6脉波。这不仅满足了PWAM下Z源逆变器的工作原理,而且使得输入电压稳定,良好地保持了Z源逆变器的优势。图10(c)中的直流母线电压的频率为逆变器输出频率的6倍,验证了PWAM中利用的6倍频脉波。图10(d)中的逆变器输出线电压也不再是恒定值,其值与部分的直流母线电压相对应。不仅如此,直流母线电压和逆变器输出线电压均保持良好的六脉波,从仿真结果看出PWAM调制下的逆变器输出电压波形的谐波含量要小于传统的PWM调制方法。

图8 传统PWM时三相qZSI相应波形Fig.8 Waveforms of three-phase qZSI under the traditional PWM

图9 PWAM时r、ia和Tm的仿真结果Fig.9 Simulation results of motor’srotation speed r,current iaand torque Tmunder PWAM
图11为采用PWAM和传统PWM方法时三相Quasi-Z源逆变器输出电压的FFT分析结果。
三相Quasi-Z源逆变器输出电压即电机的输入电压。从图11中可以看出,PWAM下的电机输入电压的THD要小于传统PWM方法,更有利于电机的稳定运行。
图12为采用PWAM和传统PWM方法时电机定子电流的FFT分析结果。从图12可以看出,PWAM方法下的定子电流的THD谐波含量要小于传统PWM方法。因此,PWAM下的永磁同步电机驱动系统具有更好的稳定性。

图10 PWAM三相qZSI仿真结果Fig.10 Simulation results of three-phase qZSI under PWAM
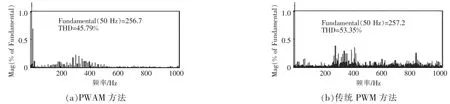
图11 两种调制方法下qZSI输出电压FFT对比结果Fig.11 Comparison result of FFT of qZSI output voltage between two modulation methods

图12 两种调制方法下电机定子电流FFT对比结果Fig.12 Comparison result of FFT of stator current between two modulation methods
4 结语
本文提出了PWAM调制方法用于三相qZSI电机驱动系统。在该调制方法下,qZSI允许直流母线侧有6倍频脉动,因此Z源所需要的电感、电容值大大降低。此外,与传统的PWM相比,在PWAM调制方法中,只有1/3的开关管进行PWM开关动作,使得在驱动电机的过程中,逆变器的开关动作和开关损耗明显减小,效率显著提升。
猜你喜欢
莆田学院学报(2021年5期)2021-11-13
哈尔滨铁道科技(2020年4期)2020-07-22
甘肃科技(2020年20期)2020-04-13
电测与仪表(2016年1期)2016-04-12
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年12期)2015-04-09
电测与仪表(2015年5期)2015-04-09
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04
电子设计工程(2014年8期)2014-02-27
