CT系统参数标定
2018-10-19 16:09陈金鸿,张柳叶,唐健凯,任翠环
科学与财富 2018年25期
关键词:信息处理技术
陈金鸿,张柳叶,唐健凯,任翠环
摘要:针对CT系统的参数标定问题,分别绘制出模板的几何信息和接收信息在探测器上的成像图,再将两个图结合起来分析CT系统参数,构建CT系统参数模型。首先,根据投影达到最大时的特殊情况,应用呈现的几何关系得到探测器单元之间的距离为0.2778mm。然后,对投影达到最小和最大的两种情况进行分析,分别得到其在托盘x、y方向上的位置。最终确定CT系统旋转中心在正方形托盘中的位置为(-9.3063,5.5560)。最后,基于最大投影与最小投影之间的间距,可得X射线是以0.9783°作为单位进行旋转变化的,因此以平行于椭圆长轴为初始位置逆时针旋转180次就可以得到X射线的180个方向。
关键词:信息处理技术;CT系统;参数标定;旋转中心
中图分类号:R81 文献标识码:A 文章编号:
0 引言
CT(Computed Tomography)可以在不破坏样品的情况下,利用样品对射线能量的吸收特性对生物组织和工程材料的样品进行断层成像,由此获取样品内部的结构信息。一种典型的二维CT系统,平行入射的X射线垂直于探测器平面,每个探测器单元看成一个接收点,且等距排列。X射线的发射器和探测器相对位置固定不变,整个发射-接收系统绕某固定的旋转中心逆时针旋转180次。对每一个X射线方向,在具有512个等距单元的探测器上测量经位置固定不动的二维待检测介质吸收衰减后的射线能量,并经过增益等处理后得到180组接收信息。
CT系统安装时往往存在误差,从而影响成像质量,因此需要对安装好的CT系统进行参数标定,即借助于已知结构的样品(称为模板)标定CT系统的参数。
1.模型的建立
1.1 CT的原理
当X射线[2]在穿透物体时,由于产生光电效应、康普顿效应及电子对效应等物理效应,射线(即入射光子)被物质吸收和散射,使得X射线强度发生衰减。根据Beer定理可知,单射射线时,单一均匀材料中,物体对于X射线的线衰减系数为μ,在强度为I0的X射线行进△x距离后,强度变为I,其强度衰减满足公式:
(1)
其中,I为穿过物体后射线强度;I0为射线入射强度;μ为线衰减系数;△x为射线穿过对象的厚度。
对于非均匀的物体(物体各处衰减系数不相等),射线穿透物体时,可将物体细分成很多小单元来计算,单元尺寸足够小时,在小单元内部可以近似看成是均质材料,每个单元衰减系数分别为μ1,μ2,μ3…μn,其射线强度衰减满足:
(2)
1.2 CT系统参数模型
1.2.1 CT系统的成像规律
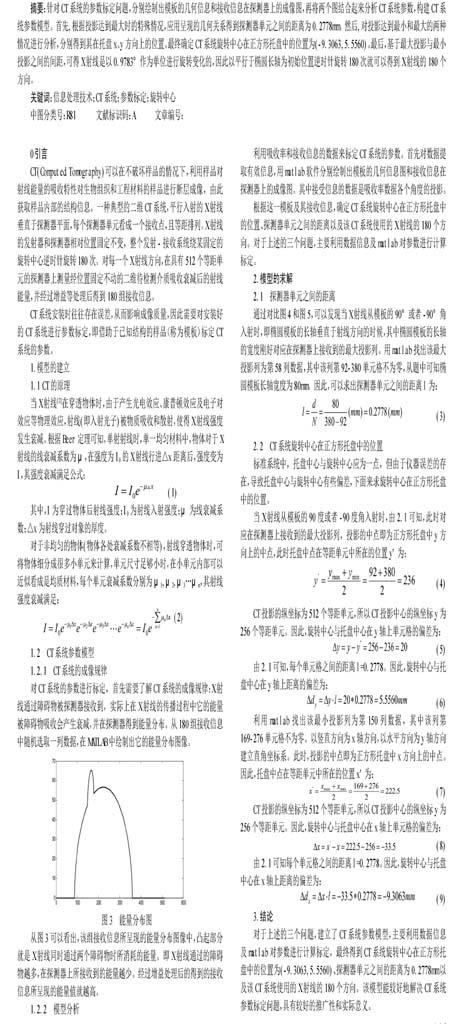
对CT系统的参数进行标定,首先需要了解CT系统的成像规律:X射线通过障碍物被探测器接收到,实际上在X射线的传播过程中它的能量被障碍物吸收会产生衰减,并在探测器得到能量分布。从180组接收信息中随机选取一列数据,在MATLAB中绘制出它的能量分布图像。
从图3可以看出,该组接收信息所呈现的能量分布图像中,凸起部分就是X射线同时通过两个障碍物时所消耗的能量。即X射线通过的障碍物越多,在探测器上所接收到的能量越少。经过增益处理后的得到的接收信息所呈现的能量值就越高。
1.2.2 模型分析
利用吸收率和接收信息的数据来标定CT系统的参数。首先对数据提取有效信息,用matlab软件分别绘制出模板的几何信息图和接收信息在探测器上的成像图。其中接受信息的数据是吸收率数据各个角度的投影。
根据这一模板及其接收信息,确定CT系统旋转中心在正方形托盘中的位置、探测器单元之间的距离以及该CT系统使用的X射线的180个方向。对于上述的三个问题,主要利用数据信息及matlab对参数进行计算标定。
2.模型的求解
2.1 探测器单元之间的距离
通过对比图4和图5,可以发现当X射线从模板的90°或者-90°角入射时,即椭圆模板的长轴垂直于射线方向的时候,其中椭圆模板的长轴的宽度刚好对应在探测器上接收到的最大投影列。用matlab找出该最大投影列为第58列数据,其中该列第92-380单元格不为零,从题中可知椭圆模板长轴宽度为80mm。因此,可以求出探测器单元之间的距离l为:
(3)
2.2 CT系统旋转中心在正方形托盘中的位置
标准系统中,托盘中心与旋转中心应为一点,但由于仪器误差的存在,导致托盘中心与旋转中心有些偏差,下面来求旋转中心在正方形托盘中的位置。
当X射线从模板的90度或者-90度角入射时,由2.1可知,此时对应在探测器上接收到的最大投影列,投影的中点即为正方形托盘中y方向上的中点,此时托盘中点在等距单元中所在的位置y'为:
(4)
CT投影的纵坐标为512个等距单元,所以CT投影中心的纵坐标y为256个等距单元。因此,旋转中心与托盘中心在y轴上单元格的偏差为:
(5)
由2.1可知,每个单元格之间的距离l=0.2778。因此,旋轉中心与托盘中心在y轴上距离的偏差为:
(6)
利用matlab找出该最小投影列为第150列数据,其中该列第169-276单元格不为零。以竖直方向为x轴方向,以水平方向为y轴方向建立直角坐标系。此时,投影的中点即为正方形托盘中x方向上的中点。因此,托盘中点在等距单元中所在的位置x'为:
(7)
CT投影的纵坐标为512个等距单元,所以CT投影中心的纵坐标y为256个等距单元。因此,旋转中心与托盘中心在x轴上单元格的偏差为:
(8)
由2.1可知每个单元格之间的距离l=0.2778。因此,旋转中心与托盘中心在x轴上距离的偏差为:
(9)
3.结论
对于上述的三个问题,建立了CT系统参数模型,主要利用数据信息及matlab对参数进行计算标定,最终得到CT系统旋转中心在正方形托盘中的位置为(-9.3063,5.5560)、探测器单元之间的距离为0.2778mm以及该CT系统使用的X射线的180个方向。该模型能较好地解决CT系统参数标定问题,具有较好的推广性和实际意义。
猜你喜欢
电脑知识与技术(2017年3期)2017-03-27
电脑知识与技术(2016年31期)2017-02-27
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年23期)2016-11-02
中国市场(2016年36期)2016-10-19
电脑知识与技术(2016年12期)2016-06-14
中小企业管理与科技·中旬刊(2016年4期)2016-05-23
电脑知识与技术(2016年5期)2016-04-14