
一种动态倒车轨迹线的实现方式
2018-10-21 11:57李玉玉
汽车与驾驶维修(维修版) 2018年6期
关键词:图层
李玉玉


摘要:为了避免倒车过程中因视觉误差引起的安全隐患问题,在倒车后视系统中出现了能体现倒车距离的倒车轨迹线,随着倒车影音系统的升级,又出现了可随车轮摆动而变动的动态倒车轨迹线。本文描述了能体现角度及距离的动态倒车轨迹线,并对动态轨迹线的硬件实现方式和软件实现方式做了深入细致的分析。
关键词:倒车轨迹线;动态倒车轨迹线;图层;图像传感器
中图分类号:U461.6 文献标示码:A
0引言
倒车轨迹线是车载摄像头通过图像标定,利用标定结果画出的具有引导效果的虚拟线条,帮助驾驶员规划倒车线路[1]。本文主要阐述了动态倒车轨迹线的实现方法,传感器自动从FLASH中调取相关辅助线图片,并接收CAN总线上的倒挡信号和计算转角信号,生成动态倒车轨迹线。动态倒车轨迹线与采集到的视频一同显示在车载导航屏。
1动态倒车轨迹线
动态倒车轨迹线是车载智能系统,根据倒车摄像头所观测到的车后实时视频画面,通过电脑所画出的一条具有引导效果的虚拟线条道路。此线左右移动大小是依据方向盘转动角度而定的,显示于车载显示器上,覆盖于真实车后路面之上,帮助驾驶员规划倒车线路(图1)。
2硬件系统
动态倒车轨迹线硬件系统由:图像采集模块、控制模块、电源模块、控制逻辑模块组成(图2)。
2.1图像采集模块
车后状态通过镜头(LENS)生成的光学图像投射到图像传感器感光面上,经光电传感器将图像信号转换为电信号,经A/D转换后变为数字信号,数字信号被传送到内部图像信号处理器(ISP),在ISP中进行插值、gamma校正、自动白平衡、自动增益和自动曝光等处理后,输出的信号经D/A转换后,最终图像传感器(SENSOR)输出视频信號,并在车载导航屏上显示。
2.2电源控制单元
电源控制单元是将车身电压通过专用的降压芯片,把电压变换成图像采集和控制单元使用的5V电压。
2.3收发器控制单元
主机控制单元需要接收车辆的转角信号,因此设计CAN收发接口电路。CAN收发电路是局域网协议控制器和物理总线之间的接口,它主要应用在汽车的高速信号传递上,为总线提供差分的发送功能和为控制器提供差分的接收功能。
2.4控制单元
控制单元采用单片机做主机,图像传感器做从机,利用内部的位图叠加系统,实现了倒车过程中将实时的车辆尾部影像、障碍物的安全距离和倒车轨迹路径等信息提供给驾驶员。轨迹线要靠单片机获取的转角信号信息控制从机,然后调取与之对应的图片.通过“OVERLAY”功能[2],显示在车载显示屏上。
3动态倒车轨迹线软件实现
动态轨迹线的软件调用分OVERLAY图层调用和车身CAN信息的处理。
3.1 OVERLAY图层调用方式
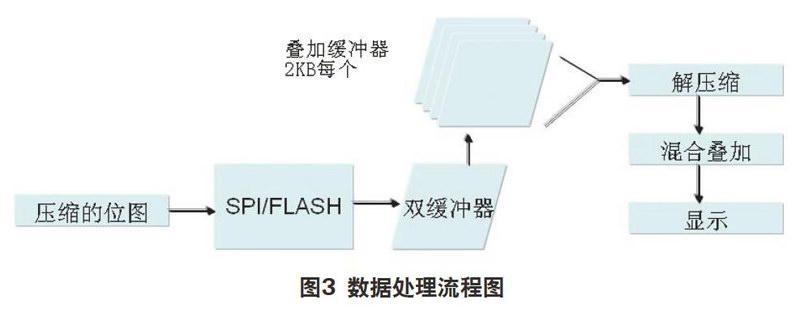
CPU先将预存在FLASH中的原始图像数据调取出来,存储到内部5个缓存中的任意一个里,图像数据的显示是按层显示的,有4个动态显示层,能够实现多达幅图像的同时叠加。叠加的图像大小为像素,因此可以通过调用不同图层来实现动态场景。OVERLAY功能数据处理流程图如图3所示。
3.2动态轨迹线的生成
动态轨迹线功能主要用于实时显示当前倒车状态的运行轨迹,当驾驶员挂倒挡时,主机控制单元首先对系统进行初始化,再读取CAN总线发送过来的转角信号,判断信号的方向和大小,将转角信号按相应规范计算得出与该角度对应的、预存在FLASH中的图片索引ID,再将指令传送到图像传感器的图像处理控制单元,其会自动将对应的图片从FLASH中读出,通过OVERLAY功能和视频信号进行混合[3],输出到导航屏上,其软件流程图如图4所示。
4结束语
文章介绍了倒车影像系统中动态倒车轨迹线的实现方式,动态倒车轨迹线需要车辆提供角度信号,能动态反映倒车轨迹实时情况,图像美观,可靠性高。在倒车轨迹可视范围内,驾驶者可以通过导航屏上显示的倒车轨迹线上刻度,估算出汽车尾部距离障碍物的具体距离,驾驶者只要按照倒车导向线所画定的倒车安全有效区域内驾驶,就能安全精准地进行倒车。
【参考文献】
[1]陈烁华,冯桑.倒车辅助系统的技术发展[J].城市车辆,2009:36-38.
[2]李富红,高清贝尔图像实时采集系统[D].太原:太原理工大学,2009
[3]张永亮,智能可视倒车系统设计[D].武汉:武汉科技大学,2008.
猜你喜欢
照相机(2021年9期)2021-11-14
照相机(2021年11期)2021-02-03
影像视觉(2020年10期)2020-10-26
影像视觉(2020年8期)2020-08-17
电脑爱好者(2019年6期)2019-10-30
电脑爱好者(2019年6期)2019-10-30
电脑爱好者(2018年7期)2018-04-23
摄影之友(2017年3期)2017-08-18
当代学生·时政版(2009年9期)2009-10-12
大众摄影(2009年9期)2009-09-10
