
特殊环境远程操作机器人设计
2018-10-24 08:26邱楠
科技创新与品牌 2018年9期
邱楠


在一些人不能进入的特殊环境中,如有毒气体或核污染的环境,需要一种特殊的机器人能够为人类进行某些操作。笔者通过研究手势控制相关资料[1-6],设计了一种特殊环境远程操作机器人。该机器人由智能感应手套和搭载机械手、机械臂的智能小车组成,能够使人体通过简单的手套进行简单的手势操作,完成某些人类不能进入的特殊环境中的操作。
1特殊环境远程操作机器人介绍
特殊环境远程操作机器人主要由智能感应手套和机器人智能小车组成。其中机器人智能小车包括了手势控制车、机械旋转臂和机械手。在一次行为指令完成过程中,智能感应手套通过传感器对人手指运动情况进行感应(如手指弯曲检测传感器对应弯曲角度指令),将感应到的数据信息通过单片机和无线射频模块进行处理传递给手势控制车、机械旋转臂和机械手,使有需要者可以通过手势准确远程控制搭载了仿人机械手及机械臂的移动平台,从而辅助完成受限行动。相比于曰前较为广泛的运用图像识别技术实现手势控制的方法,该算法无需借助手机、电脑、摄像头等其他电子设备,最直观的控制仿人机械手的运动,有效提高了仿人机械手操作性能和作业水平。
2各部分组成及工作原理
2.1智能感应手套组成及工作原理
特殊环境远程操作机器人智能感应手套的主体模块由开源硬件单片机(Arduino)、弯曲度传感器、六轴陀螺仪和无线射频模块(XBee)组成,实物图如图1所示。通过弯曲度传感器感知五根手指的手势及手腕的弯曲,由六轴陀螺仪捕捉手部的空间位置及移动,以无线射频作为通讯工具,并将这些功能用单片机结合,实现远程手势控制目的。
感应遥控控制手套的陀螺仪在工作过程中主要通过横滚角(roll)、俯仰角(pitch)及航向角(yaw)的变化来完成机器人的运动过程。
弯曲度传感器可随其弯曲连续的改变阻值,其与手指弯曲度保持一致。阻值由arduinoIDE中预设的程序由单片机的模拟串口接收,同时将其转化为1024个高低电平信号。与单片机连接的电脑可检测出其中的高或低電频信号数量(以下简称“pwm”值),将其转化为预设变量的值。
与智能感应手套相连接的为传送端XBee模块与传送端单片机,当智能感应手套上传感器对手势进行感应后,将感应到的信息传递给传送端XBee模块与传送端单片机进行处理。
2.2智能车组成及其工作原理
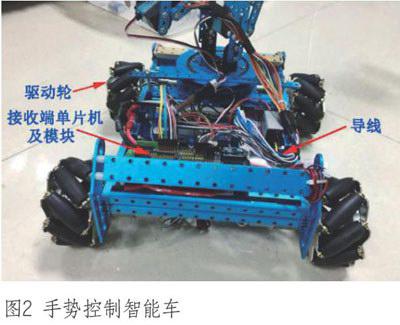
为了实现特殊环境远程操作机器人远距离的操作和自由运动.笔者研制了通过手势控制的智能车模型,(如图2所示)。该模型主体由接收端XBee模块与接收端单片机、JY61空间运动传感器(简称“陀螺仪”)、自主设计搭建的智能车组成。该接收端单片机和XBee模块与上述传送端XBee模块与传送端单片机进行点对点的连接,最终实现信息的传送。
2.2.1智能车运动机理
智能车的运动主要通过陀螺仪角度的变化控制。其运动机理主要表现为以下两个方面。
①利用智能感应手套上的陀螺仪横滚角变化控制小车前进与后退
该部分的制作与研究中,调试了JY61空问运动传感器,成功将其数据转变为可计算的角度数据,完成对手部运动姿态的捕捉。将角度值通过一定算法转化小车两马达的pwm值,控制两马达的电压值,进而控制马达的转速,以实现将手部的超过一定范围的运动姿态转化为小车运动状态的目标。同时,通过XBee完成了智能感应手套与小车的无线通讯,从而实现了手套对执行端进行远程控制。
为了通过手势变化来控制小车前后的运动,笔者选择调用陀螺仪读数中的俯仰角(pitch)的值,并基于arduino中脉冲宽度调制方法(pwm),来控制智能车电机的电压值,而电机电压值就可以用来反映电机相对的转速。
②利用智能感应手套上的陀螺仪横滚角变化控制小车左右滑移
在智能车上使用了麦克纳姆轮。这种轮胎的特点是在保持朝向不变的情况下,能够实现平面内的滑移。尤其针对室内障碍较多的复杂环境,该轮胎更体现了全方位无死角的运动优势,能够为特殊环境工作人员的相关操作提供更好的帮助。
在发送端程序中,将陀螺仪输出的横滚角(roll)通过算法转化成了四个电机不同的pwm值,以实现对电机输入电压的控制,进而完成智能车的左右滑移。
2.2.2机械臂结构设计
手势控制机械臂具有四个自由度,可以实现灵活度较高的操作指令,其本身移动范围也可以满足普通任务的需求,达到手势控制的日的。手势控制机械臂实物图如图3所示。
在该部分中,将陀螺仪和弯曲度传感器在智能感应手套上结合,通过陀螺仪感知手部的空问位置及运动状态,通过腕部的弯曲度传感器捕捉手腕抬落变化,再经过数据处理完成了对机械臂上各个舵机的控制,从而达到机械臂实时模拟小臂动作的效果。最终实现机械臂和仿人机械手结合。
3结论与展望
结合上述特殊环境远程操作机器人设计及其工作原理的阐述,得出以下结论:
(1)本文提出了一种特殊环境远程操作机器人,能够成功地解决特殊环境工作人员行动受限的难题。
(2)本文研究了特殊环境远程操作机器人各个组成部分的工作机理并对其性能进行了测试,结果表明设计的远程操作机器人性能稳定,能够帮助工作人员在特殊领域完成相应的工作任务。
(3)特殊环境远程操作机器人无需借助手机、电脑、摄像头等其他电子设备,可直观控制仿人机械手的运动,有效提高了仿人机械手操作性能和作业水平,可适应多种不同环境的应用需求,易于推广与应用。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
阅读与作文(小学高年级版)(2021年8期)2021-09-12
红领巾·萌芽(2019年9期)2019-10-09
小哥白尼·趣味科学画报(2019年12期)2019-02-28
小学科学(学生版)(2018年12期)2018-12-19
数位时尚(幼儿教育)(2018年3期)2018-04-12
百科探秘·航空航天(2017年9期)2017-12-31
阅读与作文(小学高年级版)(2017年7期)2017-08-04
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
