一种浮动车技术的道路行程时间估计方法
2018-10-26 02:42宋承波燕雪峰
小型微型计算机系统 2018年9期
宋承波,燕雪峰,2
1(南京航空航天大学 计算机科学与技术学院,南京 210016)2(江苏省 软件新技术与产业化协同创新中心,南京 211106)
1 引 言
道路行程时间的估计是智能交通运输系统的重要的一部分,并且对整个城市的交通管理与控制具有积极的影响[1].因此,近年来快速路行程时间估计方法的研究受到了不少学者的关注.林徐勋等在[2]中利用概率密度演化理论建立随机行程时间概率密度演化模型,动态反映道路行程时间可靠性的实时波动;并结合数论选点和偏微分方程TVD格式数值解设计了模型的求解算法;李昂等在[3]中针对城市道路路段车辆行程时间的计算和预测问题,通过对道路路段及其下游信号控制道路交叉口交通流特性分析,重新建立和标定了城市道路路段车辆行程时间计算模型和下游信号道路交叉口交通延误计算模型;柏从等在[4]中提出了一种基于SVM-Kalman滤波的公交车行程时间动态预测模型.模型中,经过良好训练的SVM模型从历史数据进行预测得到行程时间基准;Kalman滤波动态算法在基于SVM模型预测值和最新公交出行信息的基础上对结果进行调整,提高了行程时间预测的精度.丁宏飞等在[5]中结合BP神经网络和支持向量机的预测优点,通过蜂群算法实现参数优化,提出了一种基于BP神经网络和SVM的快速路行程时间组合预测模型.在国外学者的研究中,Zhang X等在[6]基于Dampster-Shafer证据理论(D-S理论)将将数据源信誉度和实时数据方差提取为异构数据源,提出一种多元实时行程时间融合框架;Amnir Hadachi等在[7]中使用基于实际现场测试的浮动车数据,通过应用自适应蒙特卡洛方法对来自浮动车数据进行自适应估计来估计行程时间;SKS Fan等在[8]中提出了一种嵌入式机器学习方法,利用随机森林方法基于高速公路电子收费系统收集到的数据进行行程时间预测;C Siripanpornchana等在[9]提出了一个基于Deep Belief Networks(DBN)概念的有效的旅行时间预测技术.在该方法中,使用受限玻尔兹曼机器(RBM)以无监督的方式自动学习通用交通特征,然后使用S形回归以受监督的方式预测旅行时间.
随着智能交通系统的不断发展,目前最为广泛应用的道路行程时间估计方法主要是基于浮动车技术的估计方法.浮动车技术作为一种新型的道路交通数据采集手段,可以实现对于交通流动态特性的精确检测,实现全方位的数据精确采集[10].
进行道路行程时间估计,路段平均速度是核心的交通流参数,但是,现有多数的基于浮动车技术的行程时间估计算法未考虑浮动车占有率对获取的路段平均速度可信度的影响,事实上,当利用浮动车技术估计路段的平均速度时,其前提是估计时段内路段上的浮动车数量需要满足一定的统计要求,而当浮动车数量较少时,采用现有文献提出的方法存在较大的估计误差.本文尝试采用新的方法解决行程时间预测过程中遇到的上述问题,首先根据相邻两个时段的路段平均速度变化量有界的前提,利用前一时刻平均速度的稳定性和当前浮动车采集的平均速度精确性的优点,建立基于浮动车技术的路段平均速度估计方法,充分挖掘浮动车占有率对基于浮动车技术的行程时间预测的影响,保障算法在不同浮动车占有率情况下的估计能力.进而针对浮动车占有率高于预定值情况下,提出的估计方法估计结果容易受浮动车采集的平均速度波动性而出现的估计波动问题,利用加权平均的融合方法融合固定检测器的估计结果,提升估计稳定性.
2 基于浮动车技术的道路行程时间估计方法
2.1 典型预测方法介绍
现有使用浮动车技术进行行程时间估计,通常的做法是将待估计道路分为多个路段,通过估计各个路段的车辆平均速度,使用路段长度与平均速度的比值作为路段通行时间,最终获得待估计道路的行程时间估计值.
然而,通过该方法获取的浮动车平均车速其可信度是与浮动车占有率紧密关联的,越低的浮动车占有率意味着通过该方法获取的浮动车平均车速越难以反映真实的道路实际平均速度,与此同时,浮动车由于其在道路上分配的离散性使得路段上的浮动车占有率具有很大的不确定性,因此根据该方法估计的行程时间可信度不高.
为此,当前有诸多的研究专注于解决由这种浮动车占有率的不确定性带来的估计可信度低问题,如从平均速度估计角度的使用多传感器的组合平均速度计算方法[11]或者从行程时间角度的使用多传感器分别估计行程时间的数据融合方法[12,13].
事实上,在相邻的两个时间段,由于交通流的连续性,道路上前一时刻的平均速度与当前时刻道路平均速度的差值是有界的.前一时刻的路段平均速度具有稳定性的优点,而浮动车由于其反映的是即时的交通流信息,即通过浮动车获取的道路平均速度能反映当前时刻道路的平均速度.因此,若在浮动车占有率低的情况下更多的利用前一时刻的平均速度,而在浮动车占有率高的情况下更多的利用浮动车获取的即时平均速度,便可以有效弥补浮动车占有率不确定性带来的估计可信度低问题.本文采用该思想构建基于浮动车技术的路段平均速度估计方法进行行程时间估计.
2.2 基于浮动车技术的路段行程时间估计
2.2.1 基于浮动车技术的路段平均速度估计方法

(1)
其中,f(x)为随浮动车占有率变化的权值,且f(x)值与浮动车占有率的提高成正相关,即浮动车占有率越高,意味着利用浮动车实时采集得到的平均速度越精确、能更准确的代表当前路段的平均速度Vk(t).为确定f(x)的表达式,考虑如下情况:
1)若f(x)=0,则路段平均速度Vk(t)只和前一时刻的路段平均速度有关,使用前一时刻路段平均速度估计Vk(t)为最优估计,此时浮动车占有率非常低,浮动车采集的当前时刻的路段平均速度不具有可信度;
2)随着f(x)值的增加,Vk(t)受浮动车和前一时刻的平均速度的共同影响.当f(x)<0.5时,即浮动车占有率低于预定值时,前一时刻平均速度对Vk(t)的估计起主导作用,当f(x)>0.5时,利用浮动车得到的路段平均速度值开始占据主导作用;
3)若f(x)=1,则路段平均速度Vk(t)只和浮动车有关,此时意味着浮动车占有率非常高,浮动车采集的当前时刻的路段平均速度估计Vk(t)为最优估计.
综合考虑上述三种情况,本文中f(x)的表达式定义如下:
(2)
式中,η为当前路段浮动车占有率;η*为给定的浮动车占有率预定值,代表使得利用浮动车计算的平均速度与实际平均速度偏差在一定范围内需满足的浮动车最低占有率;α为参数,反映随浮动车占有率提高时f(x)值增加的快慢程度,本文中α取值为0.4.
2.2.2 路段行程时间估计流程
通过浮动车采集的行驶过程中的瞬时车速信息,由上述2.2.1小节的方法可得到待估计路段的平均速度,则路段的行程时间估计值为路段长度与该平均速度的比值.
假设对于待估计的路段k,长度为dLk,Vk为由上述方法得到的该路段的平均速度,则该路段行程时间可表示为:
(3)
综合2.2.1小节提出的路段平均速度估计方法,本文中基于浮动车技术的路段行程时间估计方法具体的算法流程如下:
1.输入:待估计道路,且以交叉路口为界将该道路分为N个路段(L1,L2,…Ln);浮动车占有率预定值x*
2.输出:待估计道路各个路段的行程时间值
3.Begin
4. k=1;
5. while(k<=N) do
6. 获取路段k的浮动车占有率η;
7. 获取路段k前一时刻的平均速度Vk(t-1);
8. 计算当前路段k上浮动车的平均速度;
9. 根据公式(2)计算f(η);
10. 根据公式(1)计算路段k的最终平均速度;
11. 根据公式(3)计算路段k的行程时间t1k并存入数组t1[];
12. if(k=N)
13. break; //所有路段处理完毕,跳出循环进行输出
14. else
15. k=k+1;
16. endif
17. endwhile
18. returnt1[]; //返回各个路段的行程时间
19.End
通过算法过程可以看出,上述提出浮动车的道路行程时间预测方法在浮动车占有率低于预定值时,虽然通过浮动车采集的路段平均速度由于样本数量减小,采集误差较大,但由以上分析可知,此时前一时刻的平均速度占据主导,因此,当浮动车占有率低于预定值时,预测的准确性在能保证的同时,预测的行程时间随着浮动车占有率的变化其波动性较小.但是,当浮动车占有率高于预定值后,由于此时浮动车采集的路段平均速度占据主导,而由其采集的实时速度的波动性,最终的预测结果准确性虽然可以保证,但是结果随着浮动车占有率的增加预测结果的波动较大.因此,当浮动车占有率高于预定值时,有必要将利用上述基于浮动车技术获取的平均速度值与固定检测器获取的平均速度进行融合,提高算法在高浮动车占有率情况下的估计稳定性.
2.3 基于加权平均融合的估计波动平滑
由2.2.2小节的分析可知,本文提出的基于浮动车技术的路段行程时间估计方法在浮动车占有率高于预定值后,估计结果准确性虽然可以保证,但波动性较大.为此,针对该问题,本文在提出的基于浮动车技术的路段行程时间估计方法的基础上,提出基于加权平均融合的估计波动性平滑算法,在浮动车占有率高于预定值的情况下,融合上述基于浮动车的估计方法获得的路段行程时间值与基于固定检测器技术获得的路段行程时间值,提高估计稳定性.
对于待估计道路,以道路交叉口为节点将该道路分为N个路段,假设通过上述基于浮动车的估计方法获得的各个路段的行程时间为{t1k,k=1,2,…,N},使用基于固定检测器技术(参见[10])获得的各个路段的行程时间为{t2k,k=1,2,…,N},根据加权平均理论,则对于待估计道路各个路段的最终平均行程时间为:
Tk=ωf,k*t1,k+ωd,k*t2,k
(4)


(5)
为使J最小,对σ1求导有:

(6)
则使得J最小时:
(7)
通过上述融合方案可知,若浮动车占有率超过预定值,最终的路段行程时间估计结果为采用浮动车估计的行程时间值与采用固定检测器获得的行程时间值的加权平均.
2.4 基于浮动车技术的道路行程时间估计流程
综合上述基于浮动车技术的路段平均速度估计方法和估计波动平滑方法,本文提出的基于浮动车技术的道路行程时间估计方法整体流程如图1所示.

图1 基于浮动车技术的道路行程时间估计流程图Fig.1 Flow chart of road travel time estimation based on floating vehicle technology
3 模型验证及结果分析
本文选定南京市江宁区胜太西路由南京航空航天大学北门至静淮街之间800m的道路为研究对象.采用现场记录和交通仿真相结合的方法验证本文所提算法.
3.1 交通数据收集及仿真环境设置
实验根据MovSim仿真平台所需要的参数要求,首先对待研究道路的交通信号灯配时进行了记录并导入仿真模型,其次,在交通现场建立6个调差点,通过视频调查法记录调查点车流量及断面瞬时车速信息导入仿真模型.
此外,MovSim仿真平台中固定检测器设置在以交叉路口为界划分的各个路段的中部[13],待研究道路的实际行程时间真值通过现场驱车驾驶获取.
3.2 实验结果及分析
实验首先评估2.2小节中提出的估计方法对于道路行程时间估计的性能.实验通过设定仿真模型中浮动车占有率预定值为16%,并检测当浮动车占有率为8%-22%时估计的行程时间结果,验证本文提出的基于浮动车的平均速度计算模型的性能.实验中实际通过该道路的行程时间为58.3s.

图2 基于2.2小节提出的估计方法估计的结果Fig.2 Estimation result based on the method proposed in section 2.2
从图2中可以得出,当浮动车占有率低于预定值16%时,基于2.2小节提出的方法其估计的稳定性较好,原因在于此时前一时刻路段平均速度占据主导,即使浮动车采集的平均速度和真实速度误差较大且不稳定,但模型可以减小其对最终获得的平均速度的影响,因此,估计的最终结果呈现一定的稳定性;随着浮动车占有率高于预定值16%,基于3.1小节提出的方法其估计结果随浮动车占有率的变化波动较大,原因在于此时由浮动车采集的平均速度占据主导,虽然随着浮动车占有率的提高,其采集的平均速度值与真实平均速度的误差在减小,但由于其采样的随机性,导致最终的平均速度不稳定,因此估计的最终行程时间呈现出较大的波动性.
其次,实验评估2.3小节提出的加权融合方案对估计波动的平滑能力.同实验一相同,实验检测当浮动车占有率为8%-22%时估计的行程时间结果,并计算采用融合算法之前与之后估计的均方根误差,结果见表1.
表1 采用融合方法前后的估计均方根误差对比
Table 1 Comparison of the root mean square error between
average speed fusion method used before and after

估计方法融合前融合后RMSE0.5985360.405583
从图3中可以得出,当浮动车占有率高于预定值时,在单纯基于2.2小节提出的估计方法估计波动性较大的情况下,通过与固定检测器的估计结果进行加权平均估计,可以在保证最终估计精度的前提下有效降低估计的波动性,而表1的数据中所反映的融合估计后的均方根误差明显小于融合之前也证明了采用加权平均融合方法后,估计的稳定性得到了保证.
最后,本文将提出的道路行程时间估计算法与曲鑫等人在[12]中(算法1)以及Chaoyang Shi等人在[13]中(算法2)提出的行程时间预测算法进行了对比,验证本文提出的道路行程时间估计算法的估计能力,结果如图4,图5和表2所示:
从图4中可以看出,算法1整体的估计准确性在三个算法中是最差的,相比于算法2,其优点在于在不同的浮动
车占
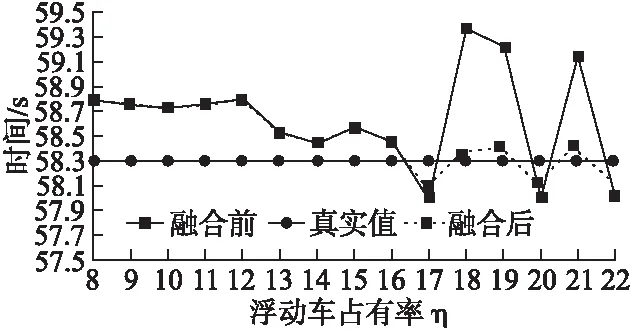
图3 加权平均融合后的行程时间预测结果Fig.3 Estimation result of road travel time after weighted average fusion
有率下,其估计的稳定性较算法1好;算法2整体的估计准确性比算法1好,但是其稳定性很差,且在浮动车占有率超过预定值后,估计的波动性在三个算法中是最大的;本文的算法在

图4 文中算法与其他算法的行程时间估计结果对比结果Fig.4 Comparison of the travel time estimation result between the algorithm in this paper and other algorithms
浮动车占有率低于预定值时,由于此时基于浮动车的平均速度估计方法中前一时刻的平均速度占主导地位,因此在这种情况下,估计的准确性保证的同时,估计的波动性很小;当浮动车占有率高于预定值后,基于浮动车技术的估计方法在保证了估计的准确度的前提下,
加权平均融合的算法将固定检

图5 文中算法与其他算法的相对误差对比Fig.5 Comparison of the relative error between the algorithm in this paper and other algorithms
测器获得的行程时间与基于浮动车获得的行程时间基于估计误差最小化方法将估计的波动性有效降低了,因此,本文提出的算法获得了和真实值相差最小的估计结果的同时,融合算法也避免了较大的波动性,当浮动车占有率超过预定值后,即使预测结果依旧波动,但波动的范围都在真实值附近且误差最小.综上可知,本文提出的算法能够满足在各种浮动车占有率情境下的估计精度要求.
表2 文中算法与其他算法的平均相对误差和最大相对误差
Table 2 Comparison of the average relative error and
maximum relative error between the algorithm in this
paper and other algorithms

本文算法算法1算法2平均相对误差(%)0.6621371.3626221.273428最大相对误差(%)1.293191.807771.636244
4 结束语
本文利用前一时刻平均速度的稳定性和当前浮动车采集的平均速度精确性的优点,根据浮动车占有率通过动态分配权重,有效结合两者的优势,提出基于浮动车技术的道路行程时间估计方法,同时,针对浮动车占有率高于预定值后因浮动车采集的平均速度波动性导致的估计波动,采用了加权融合的方法融合浮动车估计结果和固定检测器估计结果,有效降低了高浮动车占有率情况下模型的估计波动性.实验结果表明,提出的基于算法对于道路行程时间估计具有较为准确的估计精度,同时可以满足不同浮动车占有率条件下的道路行程时间估计.
本文在研究过程中,采用了现场记录和交通仿真相结合的方法,模拟了实际道路场景下南京市胜太西路的交通状况.然而在实际路网条件下,固定检测器无法实现和仿真场景中同样的高密度的布设.因此,研究在低密度固定检测器的条件下保证道路行程时间估计的准确性需要后续的进一步研究.
猜你喜欢
军民两用技术与产品(2022年8期)2022-10-10
初中生学习指导·提升版(2020年9期)2020-09-10
现代家电(2019年21期)2019-12-28
中国外汇(2019年19期)2019-11-26
小资CHIC!ELEGANCE(2018年34期)2018-11-13
现代职业教育·高职高专(2017年11期)2017-10-19
电子技术与软件工程(2017年4期)2017-03-27
中学生数理化·八年级物理人教版(2016年8期)2016-12-24
少年体育训练(2015年7期)2015-12-05
中国服饰(2014年11期)2015-04-17